




Характерной особенностью развития современной электронной промышленности является бурный рост, сопровождающийся столь же бурным снижением стоимости средств автоматизации, вычислительной техники, коммуникаций, устройств высокоточных измерений параметров. Цифровые технологии быстро вытесняют аналоговые, преобладавшие в системах управления в недалеком прошлом. Это связано с тем, что возможности цифровых средств измерения и управления на порядок выше, чем у аналоговых. К числу их достоинств относятся:
- более точное представление измеряемых величин;
- большая помехозащищенность;
- возможности построения вычислительных сетей;
- большая гибкость и эффективность в управлении процессом и т.д.
Все эти возможности связаны с конкретными выгодами для пользователей:
- ускорение работы операторов системы управления;
- экономия финансовых ресурсов;
- повышение качества и корректности решений, принимаемых операторами;
- уменьшение потерь продукции и др.
Любую автоматическую систему управления технологическим процессом (АСУ ТП) можно в конечном итоге разделить на 3 основных уровня иерархии (рис. 20).
Самым нижним уровнем является уровень датчиков и исполнительных механизмов, которые устанавливаются непосредственно на технологических объектах. Их деятельность заключается в получении параметров процесса, преобразовании их в соответствующий вид для дальнейшей передачи на более высокую ступень (функции датчиков), а также в приеме управляющих сигналов и в выполнении соответствующих действий (функции исполнительных механизмов).
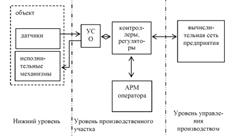
Средний уровень-уровень производственного участка. Его функции:
-сбор информации, поступающей с нижнего уровня, ее обработка и хранение;
- выработка управляющих сигналов на основе анализа информации;
- передача информации о производственном участке на более высокий уровень.
Верхний уровень в системе автоматизации занимает т.н. уровень управления. На этом уровне осуществляется контроль за производством продукции. Этот процесс включает в себя сбор поступающих с производственных участков данных, их накопление, обработку и выдачу руководящих директив нижним ступеням. Атрибутом этого уровня является центр управления производством, который может состоять из трех взаимопроникающих частей:
-операторской части,
- системы подготовки отчетов,
- системы анализа тенденций.
Операторская часть отвечает за связь между оператором и процессом на уровне управления. Она выдает информацию о процессе и позволяет в случае необходимости вмешательство ход автоматического управления. Обеспечивает диалог между систем и операторами.
Система подготовки отчетов выводит на экраны, принтеры, в архивы и т.д. информацию о технологических параметрах с указанием точного времени измерения, выдает данные о материальном и энергетическом балансе и др.
Система анализа тенденций дает оператору возможность наблюдения за технологическим параметрами и делать соответствующие выводы.
На верхнем уровне АСУ ТП размещены мощные компьютеры, выполняющие функции серверов баз данных и рабочих станций и обеспечивающие анализ и хранение всей поступившей информации за любой заданный интервал времени. а также визуализацию информации и взаимодействие с оператором.
Основой программного обеспечения верхнего уровня являются пакеты SCADA (Supervisory Control And Data Ac-quisition - системы управления и доступа к данным).
55) Анализ и моделирование систем. Моделью называют отображение определенных характеристик объекта с целью его изучения. Любая исследовательская и проектная деятельность так или иначе связана с построением моделей. Проект машины, завода, чертеж детали, макет нового здания или самолета все это модели будущих реальных объектов. Изучение явлений, происходящих в природе, в сфере деятельности людей (экономической, политической, общественной) также связано с их моделированием.
Модель позволяет выделить из всего многообразия проявлений изучаемого объекта лишь те, которые необходимы с точки зрения решаемой проблемы, т. е. модель — не точная копия объекта, а отражение лишь определенной части его свойств. Поэтому центральной проблемой моделирования является разумное упрощение модели, т. е. выбор степени подобия модели и объекта [3].
В этой связи рассмотрим понятия изоморфизма и гомоморфизма. Если элементы, связи и преобразования системы А и системы В находятся во взаимно однозначном соответствии, то эти системы изоморфны. Если между двумя объектами установлен изоморфизм относительно выделенной совокупности элементов, связей и преобразований, то каждый из этих объектов может служить моделью другого. Следовательно, с точки зрения результатов исследования, не имеет значения, какой из этих объектов будет изучаться. Выбор одного из них в качестве модели определяется удобствами исследования.
Система В называется гомоморфной относительно системы А, если каждой связи, элементу и преобразованию системы А соответствуют определенный элемент, связь и преобразование в системе В.
В отличие от изоморфизма при гомоморфизме соответствие между системами направлено в одну сторону, т. е. нескольким элементам, связям и преобразованиям системы А могут соответствовать один элемент, одна связь и одно преобразование в системе В. Следовательно, гомоморфный образ в общем случае является упрощенной моделью, частным описанием отображаемой системы. Обычно модель конструируется как гомоморфный образ объекта и как изоморфный образ изучаемых свойств и характеристик. Таким образом, модель есть система, свойства которой достаточно близки к свойствам изучаемой системы.
Модели могут быть реализованы как физическими, так и абстрактными системами. Соответственно различают физические и абстрактные модели. Физическими моделями яв-ляются, например макеты приборов, машин. К физическим относятся также электрические модели объектов и процессов или их графическая интерпретация.
В абстрактных моделях описание объектов или явлений делается на каком-либо языке. В качестве языков моделирования могут использоваться, например, естественный язык, язык чертежей, схем, математический язык. Описание объекта или явления, сделанное на математическом языке, называют математической моделью.
Примером математической модели может служить дифференциальное уравнение вида md2y(t)/dt2 = - у (t), опсывающее процесс свободных колебаний пружинного элемента. Здесь т — масса груза; у (f) — отклонение центра масс груза от положения равновесия в момент времени t; у — жесткость пружины. График свободных колебаний пружинного маятника также является его абстрактной моделью, в которой использован графический язык описания.
Как известно, одним и тем же дифференциальным уравнением часто можно описать явления, имеющие различную физическую природу. Так, приведенное выше уравнение описывает также свободные колебания в электрическом контуре LC (например в генераторе для электроэрозионной или магнитоимпульсной обработки. Это значит, что свойства колебаний в пружине и в контуре LC одинаковы и последний может рассматриваться как электрическая модель колебаний для пружинного элемента.
Представление реального объекта как системы, использование системных понятий при его моделировании послужили методологической основой для ряда принципов исследования, объединенных общим названием системный анализ. Рассмотрим некоторые из этих принципов, важные с точки зрения дальнейшего изложения. Каждую систему в иерархии систем можно исследовать в двух аспектах как элемент более широкой системы и как совокупность взаимосвязанных элементов. Два аспекта обусловливают два принципиально различных подхода к анализу систем: микроанализ (микроподход) и макроанализ (макроподход).
Микроанализ системы ведется в направлении изучения и.моделирования ее структуры и свойств элементов. При этом, естественно, предполагается, что элементы и связи доступны для наблюдения. Часто микроанализ сводится к исследованию функций элементов и процесса функционирования системы.
Макроанализ концентрирует внимание исследователя на системе в целом ее свойствах, поведении, взаимодействии с окружающей средой. Лишь с этой точки зрения исследователя интересуют свойства элементов системы и ее внутренняя структура.
Результатом макроанализа является макроскопическое описание (макромодель) системы. Часто для построения макромодели система рассматривается в виде «черного ящика». Это образное понятие означает, что внутреннее устройство системы вследствие каких-либо причин скрыто от исследователя. Наблюдаемы лишь связи системы с внешней средой. Изучая изменение выходов системы в зависимости от вариации входных воздействий, исследователь получает представление о свойствах системы, а в тех случаях, когда это требуется, строит гипотезы о ее внутреннем строении. Такой метод исследования и моделирования называют методом черного ящика.
56) Обмен информацией и выполнение команд с высших уровней управления. Эта задача возникает при взаимодействии АСУ ТП с системой оперативного управления АСУП, которая является более высоким уровнем иерархии в системе управления производством. Запросы могут касаться параметров статических или динамических моделей, необходимых при расчете технико-экономических показателей (ТЭП) технологического процесса, а команды управления могут потребовать перераспределения нагрузки между технологическими агрегатами и т. п. Специфичным для адаптивных АСУ ТП является передача ряда задач адаптивного управления, не требующих обработки в реальном времени, на верхний уровень управления, как правило, обладающий большими вычислительными ресурсами. Цель адаптивного управления состоит в решении двух основных задач, к которым относится обеспечение условий Q = Qзад или Q ≤ Qзад (9) а также Q = Qmin (10)
Первая задача (9) - это задача стабилизации динамических характеристик системы управления технологическим объектом. Вторая задача (10) -задача оптимального адаптивного управления в узком смысле.
Классификация адаптивных АСУ ТП, приведенная на рис. 19, отражает деление всех систем на три основных класса: поисковые, беспоисковые и комбинированные. Основанием для такой классификации являются два режима обработки данных, свойственных АСУ ТП: обработка данных в реальном масштабе времени, которой соответствуют беспоисковые алгоритмы адаптации и адаптивной идентификации, и обработка данных в режиме разделения времени, которой соответствуют поисковые алгоритмы. Комбинированные адаптивные АСУ ТП объединяют оба режима обработки данных.
В экстремальных АСУ ТП, которые относятся к поисковым системам, осуществляется поддержание режима технологического агрегата вблизи точки экстремума критерия качества в статическом режиме. В таких системах присутствуют пробные сигналы, что ограничивает область их применения.
Адаптивные системы с идентификатором (АСИ) реализуют эффективное в АСУ ТП управление по возмущению с помощью настраиваемой модели объекта. В иерархических АСИ каждый уровень иерархии системы управления технологическими линиями и участками непрерывного производства имеет соответствующую АСИ с идентификатором в цепи обратной связи. Двухуровневые АСУ ТП с прогнозирующей моделью, используют настраиваемую модель для быстрого по сравнению с переходным процессом в объекте регулирования расчета программного управления и его реализации в реальном масштабе времени.
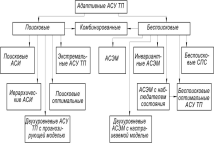
Рис.19. Классификация адаптивных АСУ ТП
Поисковые оптимальные адаптивные АСУ ТП решают также задачу динамической оптимизации на основе поисковых процедур минимизации критерия качества управляемых динамических технологических объектов управления. В классе беспоисковых адаптивных АСУ ТП отдельный подкласс составляют адаптивные системы с эталонной моделью (АСЭМ) различных типов. Инвариантные АСЭМ реализуют принцип беспоискового адаптивного управления по возмущению.
В двухуровневой АСЭМ эталонная модель идентифицируется в реальном масштабе времени и используется для синтеза программного управления в «быстром» масштабе времени, которое затем в супервизорном режиме управляет реальным технологическим объектом. Важным и сравнительно новым в адаптивных АСУ ТП являются АСЭМ с наблюдателями состояния, в качестве которых используется фильтр Калмана-Бюси.
Адаптация или адаптивная идентификация в фильтре осуществляется на основе настраиваемой модели объекта и методов беспоисковой адаптации. Инвариантные АСЭМ реализуют настройку параметров регулятора по разомкнутому циклу. В отличие от них беспоисковые АСИ осуществляют с помощью беспоисковых алгоритмов идентификации адаптацию контура управления по возмущению.
Беспоисковые адаптивные АСУ ТП на базе систем с переменной структурой относятся к классу адаптивных АСУ ТП, которые позволяют реализовать адаптивное логическое управление методами пассивной и активной адаптации. Беспоисковые оптимальные адаптивные АСУ ТП решают задачу динамической оптимизации методами беспоисковой адаптации. Они отличаются от аналогичных поисковых систем тем, что адаптация нестационарной системы управления осуществляется под оптимальную эталонную модель. При этом параметры указанной модели вычисляются с помощью поисковых процедур динамической оптимизации заранее, на этапе проектирования. Таким образом, в этих системах задача поиска оптимального управления заменяется более простой в вычислительном отношении задачей подстройки под оптимальную модель системы. Комбинированные адаптивные АСУ ТП объединяют в различных уровнях иерархии управления как поисковые, так и беспоисковые адаптивные АСУ ТП.
57) архия систем. Относительность точки зрения на систему проявляется и в том, что одну и ту же совокупность элементов допустимо рассматривать либо как систему, либо как часть некоторой, более крупной системы, т. е. множество элементов системы можно разделить на ряд подмножеств. Часть системы, образованная из элементов подмножества, называют подсистемой. Пусть система S образована из элементов 1 12 {х1, х2,..., х12}, связанных между собой некоторым образом.
Один из возможных вариантов разбиения системы S на три подсистемы А, В и С показан на рис. 2, а. Очевидно, подмножество элементов (х1, х2, х3, х4) образующих подсистему А, можно рассматривать как систему, тогда В и С будут элементами внешней среды. Предположим, что исследователя не интересуют свойства элементов и структура подсистем А, В и С, так как решаемая задача допускает рассмотрение свойств и связей систем А, В и С. В этом случае система упростится, как показано на рис. 2, б, т. е. подсистемы А, В и С будут рассматриваться как элементы системы S. Таким образом, каждая система может рассматриваться либо как подсистема или элемент некоторой, более крупной системы, либо как совокупность элементов, каждый из которых допустимо определить как систему. Существует иерархия систем, в которой элементами системы t-го уровня являются системы (t + 1) -го уровня (рис. 3). Например, промышленное предприятие можно представить как систему, элементами которой являются цехи. Цех может быть представлен как совокупность производственных участков и рабочих мест.

Рис.2. Разделение системы на подсистемы
Очевидно, выбрав в качестве исходного уровня рассмотрения предприятие, исследователь может расширять представления о системе не только «вниз», как показано, но и «вверх», т. е. переопределяя выделенную систему (в данном случае предприятие) как подсистему или элемент более крупной системы (например, объединения, корпорации или отрасли промышленности).
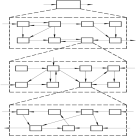
Рис.3. Иерархия подсистем
58). Адаптивная обработка информации и получение информации о параметрах модели объекта. Информационные задачи в адаптивных АСУ ТП включают в себя ряд разнородных задач. Задачи адаптивной обработки информации в зависимости от переменных характеристик каналов связи или зависимости динамических характеристик датчиков от свойств помехи или объекта управления близки к задачам описанного типа. Наиболее характерным представителем адаптивных информационных устройств в адаптивных АСУ ТП являются адаптивные помехозащищенные фильтры, как, например, адаптивный фильтр Калма-на-Бьюси. Другой задачей из этой группы является адаптивная идентификация параметров технологического процесса для выдачи справочной информации оператору, ее ре-гистрации или функциональной диагностики технологического процесса.
59) В общем случае САУ (рис. 2.5) включают:
- объект управления ОУ;
- и змерительные устройства (ИУ) или первичные преобразователи (датчики) - измеряют управляемые величины ТП и преобразуют их из одной физической формы в другую (например, термоэлектрический термометр преобразует разность температур в термоЭДС);
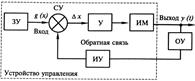
Рисунок 2.5. Обобщенная структурная схема САУ
- задающие устройства (ЗУ) - служат для задания требуемого значения регулируемой величины g (х), которое может иметь постоянную заданную величину при необходимости поддержания постоянного заданного значения управляемой величины или же изменяться по определенному закону;
- сравнивающие устройства - сопоставляют заданное значение управляемой величины ХО с действительным значением Х. Получаемый на выходе сравнивающего устройства сигнал рассогласования  передается либо через усилитель, либо непосредственно на исполнительный механизм;
передается либо через усилитель, либо непосредственно на исполнительный механизм;
- усилители или преобразующие устройства - осуществляют необходимые преобразования сигнала и его усиление в магнитных, электронных, полупроводниковых и других усилителях, когда мощность сигналов недостаточна для дальнейшего использования;
- исполнительные механизмы создают управляющие воздействия на объект управления. Они изменяют количество энергии или вещества, подводимой к объекту управления или отводимой от него, для того чтобы управляемая величина соответствовала заданному значению.
состоянием ОУ: принцип разомкнутого управления, принцип компенсации, принцип обратной связи.
Принцип разомкнутого управления состоит в том, что программа управления жестко задана в ЗУ или внешним воздействием G(t), и управление не учитывает влияние возмущений на параметры процесса. Примеры систем - часы, магнитофон, и т.п.
Принцип компенсации применяется для нейтрализации известных возмущающих воздей-ствий, если они могут искажать состояние объекта управления до недопустимых пределов. При априорно известной связи состояния объекта с возмущающим воздействием значение сигнала u(t) корректируются обратно пропорционально возмущающему воздействию x(t). Примеры систем компенсации: биметаллический маятник в часах, компенсационная обмотка машины постоянного тока и т.п. Достоинство принципа компенсации - быстрота реакции на возмущения. Недостаток - невозможность учета подобным образом всех возможных возмущений.
Принцип обратной связи получил наибольшее распространение в технических системах управления, при этом управляющее воздействие корректируется в зависимости от выходной величины y(t). Если значение y(t) отклоняется от требуемого, то происходит корректировка сигнала u(t) с целью уменьшения данного отклонения. Связь выхода ОУ с входом управляющего устройства, выполняющего коррекцию сигнала u(t), называется главной обратной связью (ОС).
Недостатком принципа обратной связи является инерционность системы. Поэтому часто применяют комбинацию данного принципа с принципом компенсации, что позволяет объединить достоинства обоих принципов - быстроту реакции на возмущение принципа компенсации и точность регулирования независимо от природы возмущений принципа обратной связи.
60) Принципы управления. Различают три фундаментальных принципа управления состоянием ОУ: принцип разомкнутого управления, принцип компенсации, принцип обратной связи.
Принцип разомкнутого управления состоит в том, что программа управления жестко задана в ЗУ или внешним воздействием G(t), и управление не учитывает влияние возмущений на параметры процесса. Примеры систем - часы, магнитофон, и т.п.
Принцип компенсации применяется для нейтрализации известных возмущающих воздей-ствий, если они могут искажать состояние объекта управления до недопустимых пределов. При априорно известной связи состояния объекта с возмущающим воздействием значение сигнала u(t) корректируются обратно пропорционально возмущающему воздействию x(t). Примеры систем компенсации: биметаллический маятник в часах, компенсационная обмотка машины постоянного тока и т.п. Достоинство принципа компенсации - быстрота реакции на возмущения. Недостаток - невозможность учета подобным образом всех возможных возмущений.
Принцип обратной связи получил наибольшее распространение в технических системах управления, при этом управляющее воздействие корректируется в зависимости от выходной величины y(t). Если значение y(t) отклоняется от требуемого, то происходит корректировка сигнала u(t) с целью уменьшения данного отклонения. Связь выхода ОУ с входом управляющего устройства, выполняющего коррекцию сигнала u(t), называется главной обратной связью (ОС).
Недостатком принципа обратной связи является инерционность системы. Поэтому часто применяют комбинацию данного принципа с принципом компенсации, что позволяет объединить достоинства обоих принципов - быстроту реакции на возмущение принципа компенсации и точность регулирования независимо от природы возмущений принципа обратной связи.
61) Чем отличается динамическая система от статической?
По признаку учета зависимости объекта моделирования от времени различают статические и динамические характеристики систем, отражаемые в соответствующих моделях.
Статические модели (модели статики) отражают функцию системы - конкретное состояние реальной или проектируемой системы.
Примеры. Закон Ома, описание показателей эффективности организацией в некоторый момент времени.
Динамические модели (модели динамики) отражают функционирование системы - процесс изменения состояний реальной или проектируемой системы. Они показывают различия между состояниями, последовательность смены состояний и развитие событий с течением времени.
Примеры. изменение температуры электроплиты при ее включении, описание процесса изменения показателей эффективности за некоторый период времени.
Отличие статических и динамических моделей заключено в учете времени: в статике его как бы не существует, а в динамике это основной элемент.

