




Структурный анализ механизма
1.1 определение степени подвижности механизма по формуле П.Л Чебышева
1.2 Разложение механизма на группы Ассура
Кинематический анализ механизма
2.1 Построение 12 планов положений механизма
2.2 Построение диаграмм перемещений механизма
2.3 Построение диаграмм скоростей и ускорений механизма графическим дифференцированием
2.4 Построение планов скоростей
2.5 Построение плана ускорений для 3 положения механизма
Силовой анализ механизма
3.1 Определение нагрузок, действующих на звенья механизма
3.2 Силовой анализ звеньев
3.3 Определение уравновешивающей силы с помощью жесткого рычага Жуковского
Кинематический анализ привода
4.1 Подбор чисел зубьев планетарной передачи
4.2 Кинематическое исследование привода
4.3 Графическое исследование привода
4.4 Определение размеров зубчатого зацепления
4.5 Определение коэффициента перекрытия
Структурный анализ механизма.
Определяем степень подвижности механизма по формуле
П.Л. Чебышева.

где  — число подвижных звеньев (кривошип ОА, шатуны АВ, ВС и BD, ползун F);
— число подвижных звеньев (кривошип ОА, шатуны АВ, ВС и BD, ползун F);
 — число кинематических пар пятого класса (О(1;0), А(1,2), В(2,3), С(3,0), D(3,4), F(4,5)и G(5,0))
— число кинематических пар пятого класса (О(1;0), А(1,2), В(2,3), С(3,0), D(3,4), F(4,5)и G(5,0))
 — число кинематических пар четвертого класс
— число кинематических пар четвертого класс
1,2 Для характеристики механизма, разобьём его на начальный механизм и группы Ассура.
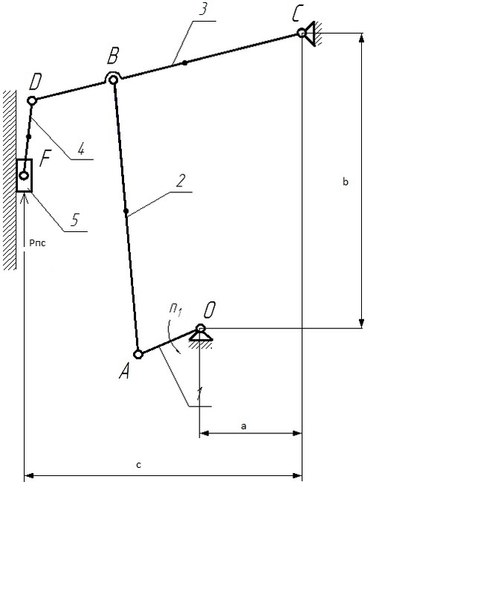
Формула строения механизма: I [0,1] → II3 [2,3]→ II2 [4, 5]Цепь: плоская, замкнутая, сложная. В целом механизм ІІ класса(рис 1)
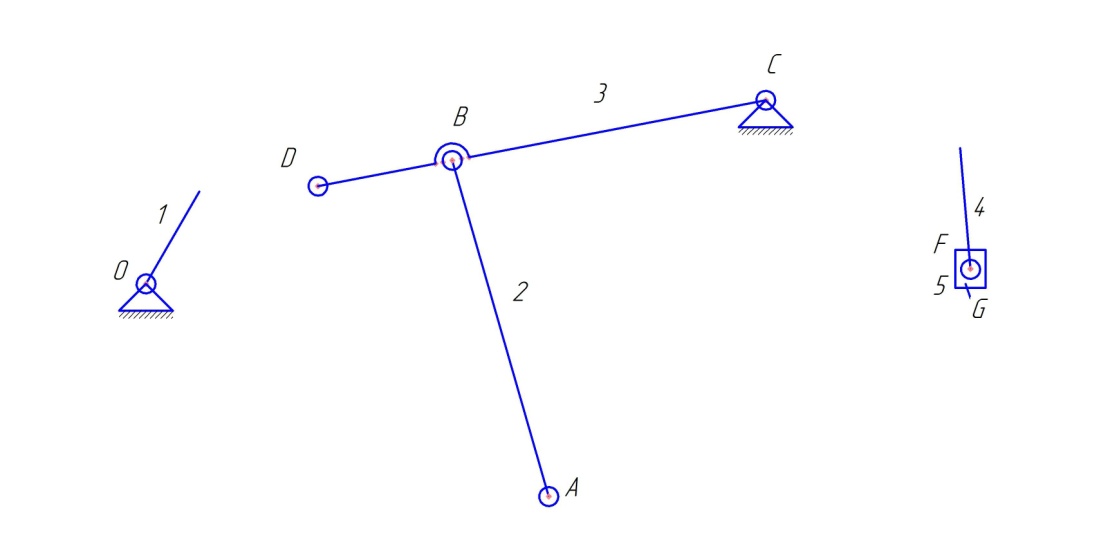
Рис 1
Кинематический анализ механизма
Построение планов положений механизма
Строим планы положений механизма для 12-ти равностоящих положений ведущего звена – кривошипа. Из произвольно выбранной точки О проводим окружность радиуса R = ОА (мм). Эта окружность – траектория точки А кривошипа. При этом масштабный коэффициент длин
Ml=LOA/OA=0.07/28=0.0025 м/мм
где LОА длина кривошипа по заданию, ОА – отрезок, изображающий его на чертеже, мм
С учетом масштабного коэффициента определим все размеры механизма на чертеже, мм׃
OA=lOA/m1=0,07/0,0025 = 28 a =0,11/0,0025=44
AB=lAB/m1=0,23/0,0025=92b=0,20/0,0025=80
BC=lBC/m1=0,21/0,0025=84 c =0,29/0,0025=116
СD=lСD/m1=30/0,0025=120
DF=lDF/m1=0,08/0,0025=32
Построение диаграмм перемещений механизма
Выбираем масштаб углов по «X»
Мф=360/L = 360/240 = 1.5 град/мм
Построение диаграмм скоростей и ускорений механизма графическим дифференцированием
График скоростей строится графическим дифференцированием графика перемещений (метод хорд)
Mvf=Ml/(Mф*H) = 0.0025/(1.5*50)=0.000033
Графическим дифференцированием графика скоростей строится график ускорений
Ma=Mv/(MФ*H) = 0.000033/(1.5*50)=0.000000044
Построение планов скоростей
Строим 12 планов скоростей:
Скорость т. А1 кривошипа определяется по формуле:
VA=W1*LOAW1=П*n1/30 = 3.14*70/30=7.33 рад/с отсюда VA=0.51 м/с
Построение начинаем с отрезка pa=60 мм перпендикулярно О1А. Масштабный коэффициент
Mv=VA/pa = 0.51/60 = 0.0085 (м/с)/мм
Скорость т. B определяется
VB=VA+VBA
Скорость т. F определяется
VF=VD+VFD
Скорость точки D определяем из выражения:
Pb/pd=CB/CD=VD/VB
Строю план скоростей длятретьего положения механизма:
Из полюса р откладую отрезок ра=60 мм ^ ОА из полюса провожу линию ^ звену ВС, а из точки а ^ звену АВ получаю точку пересечения b и отрезок pb=21 мм. Из точки p, по направлению вектора b провожу отрезок pd=29 мм. Из точки d ^ FD провожу прямую до пересечения с прямой // у-у (выходящей из полюса) – получаем pf = 28 мм.
Определяем скорости:
VB = pb*Mv = 21*0.0085 = 0.1785 м/с VD=pd*Мv = 29*0.0085=0.2465м/с
VF=pf*Мv = 28*0.0085= 0.238 м/с VAB=ba*Mv = 49*0.0085 = 0.42м/с
VFD= fd*Mv= 9*0.0085= 0.08 м/с
Далее определим скорости точек S:
VS2=pS2*Mv= 38*0.0085=0.323м/с VS3=pS3*Mv= 10*0.0085=0.085 м/с
VS4=pS4*Mv=28*0.0085=0.238 м/с
После чего определим угловые скорости для 3, 4, 5 звеньев
W2=VBA/LAB=0.42/0.23=1.81 рад/с W3=VD/LCD=0.25/0.3=0.82 рад/с
W4=VFD/LFD=0.0768/0.08=0.96 рад/с
Значения для остальных положений занесем в таблицу:
| положения механизма | ||||||||||||||
| параметры | ||||||||||||||
| va | 0,51 | 0,51 | 0,51 | 0,51 | 0,51 | 0,51 | 0,51 | 0,51 | 0,51 | 0,51 | 0,51 | 0,51 | 0,51 | 0,51 |
| pa мм | ||||||||||||||
| pb | ||||||||||||||
| Vb | 0,18 | 0,43 | 0,69 | 0,7 | 0,26 | 0,2 | 0,64 | 0,53 | 0,48 | 0,37 | 0,21 | 0,29 | ||
| ab | ||||||||||||||
| Vba | 0,42 | 0,13 | 0,35 | 0,74 | 0,66 | 0,37 | 0,13 | 0,07 | 0,24 | 0,39 | 0,49 | 0,52 | ||
| pd | ||||||||||||||
| Vd | 0,25 | 0,61 | 0,99 | 0,99 | 0,38 | 0,27 | 0,64 | 0,75 | 0,7 | 0,53 | 0,3 | 0,42 | ||
| pf | ||||||||||||||
| Vf | 0,24 | 0,6 | 0,99 | 0,95 | 0,37 | 0,27 | 0,61 | 0,73 | 0,7 | 0,53 | 0,29 | 0,04 | ||
| df | ||||||||||||||
| Vfd | 0,08 | 0,13 | 0,01 | 0,24 | 0,15 | 0,11 | 0,19 | 0,1 | 0,03 | 0,1 | 0,09 | 0,02 | ||
| ps2 | ||||||||||||||
| Vs2 | 0,32 | 0,47 | 0,58 | 0,48 | 0,24 | 0,34 | 0,48 | 0,52 | 0,48 | 0,4 | 0,31 | 0,26 | ||
| ps3 | ||||||||||||||
| Vs3 | 0,09 | 0,21 | 0,35 | 0,35 | 0,14 | 0,09 | 0,22 | 0,26 | 0,25 | 0,19 | 0,1 | 0,02 | ||
| ps4 | ||||||||||||||
| Vs4 | 0,24 | 0,82 | 0,99 | 0,97 | 0,37 | 0,26 | 0,61 | 0,74 | 0,7 | 0,53 | 0,29 | 0,04 | ||
| w1 | 7,33 | 7,33 | 7,33 | 7,33 | 7,33 | 7,33 | 7,33 | 7,33 | 7,33 | 7,33 | 7,33 | 7,33 | ||
| w2 | 1,81 | 0,55 | 1,52 | 3,22 | 2,88 | 1,63 | 0,55 | 0,3 | 1,03 | 1,7 | 2,14 | 2,25 | ||
| w3 | 0,82 | 2,04 | 3,29 | 3,32 | 1,28 | 0,91 | 2,13 | 2,49 | 2,32 | 1,76 | 0,99 | 1,39 | ||
| w4 | 0,96 | 1,59 | 0,11 | 2,98 | 1,91 | 1,38 | 2,34 | 1,28 | 0,32 | 1,28 | 1,06 | 0,21 |
Построение плана ускорений для 3 положения механизма
Построение плана ускорений рассмотрим для положения3 механизма, т.к. для этого положения будет производиться силовой расчет. Так как кривошип ОА вращается с постоянной угловой скоростью, то точка А кривошипа будет иметь только нормальное ускорение, величина которого равна:
aA=W2*LOA=(7.33)2*0.07=3.76 м/с2
Масштаб плана ускорений определяется по формуле:
Ma=aA/100=3.76/100=0.0376(м/с2)/мм вычерчиваем ра //ОА
Ускорение точки Bнаходим из системы:

 =(W2)2*LAB= (1.81)2*0.23=0.754 м/с2
=(W2)2*LAB= (1.81)2*0.23=0.754 м/с2
An=  /Ma =20.04 ммчертимаn//АВ
/Ma =20.04 ммчертимаn//АВ
 =(W3)2*LCB=(0.82)2*0.21=0.14 м/с2
=(W3)2*LCB=(0.82)2*0.21=0.14 м/с2
Pn1=  /Ma=3.73мм чертим рn1//BC (направление от В к С)
/Ma=3.73мм чертим рn1//BC (направление от В к С)
Далее проводим из nперпендикуляр к АВ, а из n1 перпендикуляр к ВС, в пересечении получим точку b. Найдем  =nb*Ma=87*0.0376=3.27 м/с2,
=nb*Ma=87*0.0376=3.27 м/с2,  =n1b*Ma= 128*0.0376=4.8 м/с2, aB=pb*Ma=127.79*0.0376=4.81м/с2, после этого находим отрезок pd
=n1b*Ma= 128*0.0376=4.8 м/с2, aB=pb*Ma=127.79*0.0376=4.81м/с2, после этого находим отрезок pd
Pd=(LCD*pb)/LBC=(0.3*127.8)/0.21=182.57 мм чертим от р через b,
a(fd)n=(W4)2*LFD=(0.96)*0.08=0.074м/с2
dn2= a(fd)n/Ma=0.074/0.0376=1.97ммчертим //FDотFкB, после из р строим ось y-y, из n2 чертим перпендикуляр к FD, в пересечении получаем точку f.
Находим оставшиеся ускорения:
a(FD)t=n2f*Ma=50*0.0376=1.88 м/с2а(FD)=df*Ma=50*0.0376= 1.88 м/с2
a(F)=pf*Ma=177*0.0376=6.66 м/с2
Далее находим ускорения точек S:
aS2=pS2*MA=106*0.0376=3.99 м/с2
aS3=pS3*MA=91*0.0376= 3.42м/с2
aS4=pS4*MA=98*0.0376= 3.68 м/с2
после высчитываем угловые ускорения:
E2=a(BA)/LAB=3.36/0.23= 14.6 рад/с2
E3=a(B)/LCB=4.81/0.21=24.1рад/с2
E4=a(FD)/LFD=1.88/0.08= 23.5 рад/с2
Все подсчитанное занесем в таблицу:
| парвметры | результат | Параметры | результат |
| a(A) | 3,76 | E2 | 14,6 |
| A(BA)n | 0,754 | E3 | 24,1 |
| A(B)n | 0,14 | E4 | 23,5 |
| a(B) | 4,81 | Pa | |
| a(B)t | 4,8 | An | |
| a(BA)t | 3,27 | pn1 | |
| a(BA) | 3,36 | n1b | |
| a(FD)n | 0,074 | Nb | |
| a(D) | 6,88 | Pd | |
| a(FD)t | 1,88 | dn2 | |
| a(f) | 6,66 | Pf | |
| a(FD) | 1,88 | n2f | |
| a(S2) | 3,99 | ps2 | |
| a(S3) | 3,42 | ps3 | |
| a(S4) | 3,68 | ps4 | |
| pb | 127.8 | Df |
Силовой анализ механизма
3,1 Определение нагрузок, действующих на звенья механизма
А) определяем силы тяжести: G
Gi=mi*g
G1=46*10=460н
G2=7*10=70н
G3=9*10=90н
G4=15*10=150н
G5=35*10=350н
Б) определяем силы энерции Fn
Fni=mi*aSi
Fn2=7*3.99=27.93н
Fn3=3.42*9=30.78н
Fn4=3,68*15=55.2н
Fn5=35*6.66=233.1н

