




Мета роботи
Дослідження рівноваги трьох непаралельних сил.
Прилади та приладдя
1. Експериментальна установка (рис. С5.1).
2. Вантажі: Р1=1,9 Н; Р2=2,4 Н; Р4=4,2 Н.
3. Терези.
4. Гирі.
5. Лінійка.
Опис установки
На вертикальній пластині А1А2А3А4 (рис. С5.1) встановлюється стержень В1В5 вагою Q з допомогою нерозтяжних ниток КВ5 та СВ1. Причому, нитка СВ1 перекинута через нерухомий блок і прикріплена до спіральної пружини Д. На стержень В1В5 в точці Вj, (j=2, 3, 4) підвішується вантаж Р і (і =1, 2, 4). Кути a1 та a2 між нитками та стержнем В1В5 визначаються з допомогою кутомірів закріплених на стержні в точках В1 та В5. Горизонтальність основи на яку встановлена пластина А1А2А3А4 перевіряється за допомогою ватерпаса.
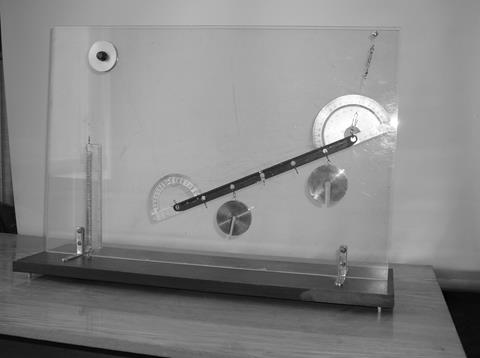

Рисунок. С5.1.
Теоретична частина
Підвісимо вантаж Р і , наприклад в точці В2. Стержень В1В5 (рис.С5.2)знаходиться в рівновазі під дією системи сил 
 0; де Т1, Т2 - реакції відповідно нитки СВ1 та КВ5; Q - вага стержня. Сили
0; де Т1, Т2 - реакції відповідно нитки СВ1 та КВ5; Q - вага стержня. Сили  та
та  замінимо однією силою
замінимо однією силою  (рис.С5.3). Таким чином, на стержень В1В5 діє врівноважена система сил
(рис.С5.3). Таким чином, на стержень В1В5 діє врівноважена система сил  0. Тоді у відповідності до теореми про три сили, лінії дії сил
0. Тоді у відповідності до теореми про три сили, лінії дії сил  перетинаються в точці 0 (рис.С5.2).
перетинаються в точці 0 (рис.С5.2).
Рисунок С5.2.
Рисунок С5.3.
Експериментальна частина
1. Стержень  зняти з площини
зняти з площини  .
.
2. З допомогою важелів визначити вагу стержня  .
.
3. Виміряти довжину стержня та відстань між точками  (і=2,3,4,5).
(і=2,3,4,5).
4. Визначити жорсткість С пружини Д. (рис. С5.1)

Де  -вага тіла, що підвищується в точці
-вага тіла, що підвищується в точці  до пружини
до пружини  - деформація (розтяг) пружини під дією вантажу
- деформація (розтяг) пружини під дією вантажу  .
.
5. Стержень прикріплюється до ниток в точках  та
та  .
.
6. На стержень в точці  (j=2,3,4) підвішується вантаж (і=1,2,4). Точка
(j=2,3,4) підвішується вантаж (і=1,2,4). Точка  та вантаж вибирають з таблиці С6.1.
та вантаж вибирають з таблиці С6.1.
Таблиця С6.1
| № бригад | ||||||||
Точка 
| 
| 
| 
| 
|
|
|
|
|
Вантаж 
| 
| 
| 
|
|
|
|
|
|
7. З допомогою кутомірів визначаємо  (рис. С5.1)
(рис. С5.1)
8. Деформація  пружина D (рис. С5.1) знаходиться за допомогою лінійки N.
пружина D (рис. С5.1) знаходиться за допомогою лінійки N.
9. Результати вимірів заносимо в таблицю С6.2.
Таблиця С6.2
| № п/п | 
| 
| 
| 
|
Знайти середнє значення 



10. Визначити натяг нитки 

11. З допомогою кутів  креслимо у вибраному масштабі стержень
креслимо у вибраному масштабі стержень  (рис. С5.2)
(рис. С5.2)
12. До стержня  прикладаємо сили
прикладаємо сили 
13. Знаходимо лінію дії сили Р- рівнодіючої сил  та
та  . (рис. С5.2, С5.3).
. (рис. С5.2, С5.3).
14. Знаходимо точку О перетину лінії сили  та
та  , графічним або аналітичним методом.
, графічним або аналітичним методом.
15. Графічним методом визначаємо силу  , враховуючи сили Р і Т1.
, враховуючи сили Р і Т1.
16. Визначаємо аналітичним методом ( ) зусилля
) зусилля 
17. Порівняємо результати визначення зусиль в нитках графічним ( ) та аналітичним (
) та аналітичним ( ) методами і знаходимо похибку.
) методами і знаходимо похибку.
 ,
, 
Контрольні запитання
1. Які фактори впливають на точність експериментально визначеного зусилля в нитці  ?
?
2. Записати аналітичні умови рівноваги збіжної системи сил.
3. Що таке силовий багатокутник?
4. При яких умовах силовий багатокутник буде замкнений?
5. В чому суть аксіоми про три сили?
КІНЕМАТИКА ТОЧКИ ТА ТІЛА
К-1. Кінематика точки
Мета роботи. Визначення траєкторії руху точки шатуна кривошипно-шатунного механізму та порівняння отриманих результатів з розрахунковими.
Прилади та приладдя
1. Експериментальна установка (рис. К1.1).
2. Масштабний папір формату А4.
3. Лінійка.
Опис установки
Установка (рис. К1.1) складається із кривошипа 2, нерухомо з’єднаного з ручкою 1. В точці А до кривошипа шарнірно приєднаний шатун 3, точка В якого приєднано до повзуна 6, що рухається вздовж горизонтальної направляючої 7.На шатуні 3 в любій його точці може фіксуватися повзун 4, в тілі якого закріплений грифель.
Теоретична частина
Знайдемо рівняння руху точки М шатуна А В кривошипна-шатунного механізму (рис. К1.2) аналітично. При довільному куті між віссю х і кривошипом ОА координати точки М будуть мати вигляд.
 (К1.1)
(К1.1)
 (К1.2)
(К1.2)
Знайдемо при якому куті  координати точки досягнуть максимуму. Із рівнянь (К1.1) та (К1.2) знаходимо:
координати точки досягнуть максимуму. Із рівнянь (К1.1) та (К1.2) знаходимо:



Рисунок. К1.1
Експериментальна частина
1. На екрані закріпити чистий аркуш паперу.
2. На основі даних таблиці К1.1, встановити положення повзуна 4 на шатуні 3.
3. Рівномірно обертаючи ручку 1, привести механізм до руху. Кривошип 2 повинен зробити не менше 2 обертів навколо осі.
4. Зняти папір із викресленою траєкторією руху заданої точки шатуна.
5. Виміряти довжину кривошипа ОА та шатуна АВ.
Обробка результатів експеримента
На отриманій траєкторії руху показати осі координат X, Y та виміряти найбільші координати  точки М.
точки М.
Таблиця К1.1
| № бригади | ||||||||
| АМ, мм |
Порівнюємо одержані значення  та
та  з аналогічними координатами, що одержані вимірюванням і траєкторії руху точки М і знаходимо відносну похибку
з аналогічними координатами, що одержані вимірюванням і траєкторії руху точки М і знаходимо відносну похибку

Контрольні запитання
1. Які є способи задання руху точки.
2. Знайти рівняння руху точок А і В.
3. Із рівняння (К1.1) та (К1.2) знайти рівняння траєкторії точки В в координатній формі.
4. Довести справедливість умов (К1.3).

