Ќаличие в составе 8-разр€дного ћ модул€ контроллера последовательного ввода/ вывода стало настолько обычным €влением, что лишь самые простые, маловыводные ћ в корпусах DIP16 и DIP20 не имеют портов последовательного обмена. ѕри анализе структуры более сложных 8-разр€дных ћ отчетливо прослеживаетс€ тенденци€ нали≠чи€ в их составе двух контроллеров последовательного обмена, а в некоторых новейших модел€х - даже трех (сери€ AZ семейства Ќ—08 фирмы ЂMotorolaї). «адачи, которые решаютс€ средствами модул€ контроллера последовательного ввода/вывода, могут быть условно разделены на три группы:
1)св€зь встраиваемой ћѕ-системы с системой управлени€ верхнего уровн€: промыш≠ленным компьютером, программируемым контроллером, офисным компьютером; наиболее часто дл€ этих целей используютс€ интерфейсы RS-232C и RS-485; в насто€щее
врем€ все более широкую попул€рность приобретает интерфейс USB;
2)св€зь с внешними по отношению к ћ периферийными »— встраиваемой ћѕ-системы, а также с датчиками физических величин с последовательным выходом; дл€ этих
целей используютс€ интерфейсы SPI, I2C, а также нестандартные протоколы обмена;
3)интерфейс св€зи с локальной сетью в мультимикропроцессорных системах; в систе≠мах с числом ћ до п€ти обычно используют сети на основе интерфейсов PC, RS-232C,
RS-485 с собственными сетевыми протоколами верхнего уровн€; в более сложных систе≠мах все более попул€рным становитс€ протокол CAN.
— точки зрени€ инженера-схемотехника, упом€нутые типы интерфейсов последователь≠ной св€зи отличаютс€: режимом передачи данных (синхронный или асинхронный), форма≠том кадра (число бит в посылке при передаче байта полезной информации) и временными диаграммами сигналов на лини€х (уровни сигналов и положение фронтов при переключе≠ни€х). „исло линий, по которым происходит передача в последовательном коде, обычно равно двум (PC, RS-232C, RS-485, CAN) или трем (SPI, некоторые нестандартные синх≠ронные протоколы). ѕоследнее позвол€ет спроектировать модули контроллеров последо≠вательного обмена таким образом, чтобы с их помощью на аппаратном уровне можно было бы реализовать несколько типов последовательных интерфейсов. ѕри этом режим пере≠дачи (синхронный или асинхронный) и формат кадра поддерживаютс€ на уровне логи≠ческих сигналов, а реальные физические уровни сигналов, характерные дл€ каждого типа интерфейса, получают с помощью специальных »—, которые нос€т название приемопере≠датчиков, конверторов, трансиверов.
¬ состав 8-разр€дных ћ различных фирм производителей вход€т следующие моду≠ли контроллеров последовательных интерфейсов:
Х модуль последовательного универсального интерфейса USI (Universal Serial Interface); входит в состав ћ семейства AVR фирмы ЂAtmelї; может поддерживать протоколы асинхронного обмена дл€ интерфейсов RS-232, RS-422 и RS-485, а также синхронные протоколы интерфейсов SPI и I2C;
Х модуль универсального асинхронного интерфейса UART (Universal Asynchronous Receiver and Transmitter); поддерживает протоколы асинхронного обмена интерфейсов RS-232, RS-422 и RS-485;
|
|
|
Х модуль универсального асинхронного интерфейса SCI (Serial Communication Interface); характерен дл€ ћ фирмы ЂMotorolaї; входит в состав 8-разр€дных ћ семейств Ќ—05, Ќ—11 и Ќ—08; €вл€етс€ функциональным аналогом модулей типа UART, т. е. ѕоддерживает протоколы асинхронного обмена дл€ интерфейсов RS-232, RS-422 и RS-485;
Х модуль последовательного синхронного интерфейса SPI (Serial Peripheral Interface); поддерживает протокол синхронного обмена в стандарте SPI; интерфейс SPI был предложен фирмой ЂMotorolaї, поэтому контроллер SPI входит в состав большого числа моделей ћ семейств Ќ—05, Ќ—11 и Ќ—08. ¬ ћ других производителей протокол SPI обычно реализуетс€ в качестве альтернативного одним из модулей контроллеров последовательных интерфейсов;
Х модуль синхронного последовательного интерфейса PC (Inter Integrated Circuit); входит в состав 8-разр€дных ћ фирмы ЂPfilipsї и ЂMicrochipї; следует заметить, что дл€ ћ ЂMicrochipї характерна реализаци€ аппаратными средствами одного и того же моду≠л€ протоколов SPI и PC;
Х модуль контроллера CAN (Control Aria Network); присутствует в 8-разр€дных ћ семейства Ќ—08 фирмы ЂMotorolaї, ћ семейства —500 фирмы ЂInfineonї, семейства 89 фирмы ЂPfilipsї; поддерживает стандартные протоколы обмена CAN сетей;
Х модуль контроллера USB (Universal Serial Bus); поддерживает новый стандарт пери≠ферийного интерфейса вычислительной техники USB.
ѕротоколы интерфейсов локальных сетей на основе ћ - I2C и CAN - отличает более сложна€ логика работы. “о же можно сказать и о новом стандарте периферийного интер≠фейса USB. ѕоэтому контроллеры CAN и USB интерфейса всегда выполн€ютс€ в виде самосто€тельного модул€, аппаратные средства которого ориентированы на поддержку соответствующих протоколов обмена. »нтерфейс I2C с возможностью работы как в веду≠щем, так и ведомом режиме, также обычно поддерживаетс€ специальным модулем (мо≠дуль последовательного порта в ћ 89—52 фирмы ЂPhilipsї). Ќо если реализуетс€ только ведомый режим PC, то в ћ PIC16 ЂMicrochipї он успешно сочетаетс€ с SPI: настройка одного и того же модул€ на один из протоколов осуществл€етс€ путем инициализации.
—ледует заметить, что одноименные модули контроллеров последовательных интер≠фейсов даже одной фирмы-производител€ имеют отличи€ в реализации дл€ разных семейств ћ . “ак, аппаратные средства контроллера SCI в составе ћ семейства Ќ—08 диагностируют большее количество ошибок на линии, чем одноименные контроллеры в составе семейства Ќ—05. » естественно, отличаютс€ одноименные модули в ћ раз≠личных фирм. ќднако эти отличи€ преимущественно свод€тс€ к различию регистров спе≠циальных функций, которые обслуживают модуль. ћеньше затрагивают алгоритмы фун≠кционировани€ одноименных модулей. », по определению, все аналогичные модули об€≠зательно реализуют на аппаратном уровне логику протокола обмена выбранного ин≠терфейса. ѕоэтому при рассмотрении данной темы целесообразно остановитьс€ именно на протоколах обмена. ѕо режиму обмена информацией интерфейсы подразде≠л€ют на симплексные, полудуплексные, дуплексные, мультиплексные. ¬ интерфейсах с симплексным режимом обмена информацией возможна лишь однонаправленна€ пе≠редача информации от одного абонента к другому. —оответственно и буферы приемника и передатчика информации выполнены однонаправленными. ¬ интерфейсах с полудуп≠лексным режимом обмена в произвольный момент времени может производитьс€ либо только прием, либо только передача данных между двум€ абонентами, буферы приемо≠передатчика каждого из абонентов св€зи выполнены двунаправленными. ¬ интерфей≠сах с дуплексным режимом обмена в любой произвольный момент времени может про≠изводитьс€ одновременный прием и передача данных между двум€ абонентами. Ћинии приема и передачи информации физически разделены, соответственно контроллер об≠мена каждого абонента имеет два вывода (приемника и передатчика), и буферы этих выводов однонаправленные. ¬ интерфейсах с мультиплексным режимом обмена в каж≠дый момент времени может осуществл€тьс€ прием или передача данных между парой любых абонентов сети.
|
|
|
—реди большого множества различных типов встроенных контроллеров последова≠тельного обмена, которые вход€т в состав тех или иных 8-разр€дных ћ , сложилс€ стан≠дарт Ђде-фактої - модуль UART (Universal Asynchronous Receiver and Transmitter).
¬ переводе с английского UART - универсальный асинхронный приемопередатчик. ќд≠нако многие из модулей UART кроме асинхронного режима обмена способны также реа≠лизовать простейший режим синхронной передачи данных. ѕоэтому более правильным с точки зрени€ терминологии было бы именовать эти модули USART (Universal Synchronous/Asynchronous Receiver and Transmitter) - универсальный синхронно/асинх≠ронный приемопередатчик. “акой термин тоже существует, но пользуютс€ им редко.
Ќе все производители ћ используют термин UART дл€ обозначени€ типа модул€ кон≠троллера последовательного обмена. “ак, в ћ фирмы ЂMotorolaї модуль асинхронной приемопередачи, который поддерживает те же режимы асинхронного обмена, что и UART, прин€то называть SCI (Serial Communication Interface). —ледует отметить, что модуль типа SCI обычно реализует только режим асинхронного обмена, однако ћ фирмы ЂMotorolaї традиционно имеют в своем составе два модул€ последовательного обмена: модуль SCI с возможностью реализации только протоколов асинхронной приемопередачи дл€ ин≠терфейсов RS-232C, RS-422A, RS-485 и модуль контроллера синхронного интерфейса в стандарте SPI.
ћодуль типа UART в максимальной конфигурации обычно реализует два типа протокола обмена в асинхронном режиме (кадр длиною в 10 бит или в 11 бит) и два типа протокола в синхронном режиме (трехпроводный полнодуплексный обмен или двухпроводный полудуплексный обмен). ”прощенна€ структура модул€ типа UART приведена на рис. 4.19.
ћодуль состоит из двух независимых подсистем: передатчика (Transmitter) и прием≠ника (Receiver), поэтому возможен режим одновременной передачи и приема инфор≠мации в последовательном коде. ќснову каждой подсистемы составл€ют сдвиговый регистр и параллельный регистр буфера данных. ќбращение к буферу данных приемни≠ка и передатчика осуществл€етс€ по одному и тому же адресу, но при выполнении опе≠рации записи данные будут помещены в буфер передатчика TDBUF, операции чтени€ -данные будут считаны из буфера приемника RDBUF.
ѕередача данных от ћ к другому устройству инициируетс€ посредством записи бай≠та данных в регистр TDBUF.

≈сли работа передатчика разрешена (бит “≈ в регистре управлени€ модулем равен 1), то аппаратные средства модул€ загружают содержимое TDBUF в сдвиговый регистр и под управлением генератора скорости обмена биты из сдвигового регистра, начина€ с младшего DO, последовательно передаютс€ на вывод TxD ћ . ѕо завершении передачи байта данных устанавливаетс€ бит TI, который инфор≠мирует ћ о том, что буфер передатчика пуст и в него могут быть загружены новые данные дл€ передачи. Ѕит TI генерирует запрос на прерывание, если прерывани€ от передатчика в ћ разрешены. Ѕит TI может также быть считан программно.
≈сли работа приемника разрешена (бит RE в регистре управлени€ модулем равен 1), то после распознавани€ стартового бита аппаратные средства приемника преобразуют данные, которые поступают на вход RxD в последовательном коде, в параллельный код. ѕосле завершени€ приема последнего бита в сдвиговом регистре приемника находитс€ прин€тый байт данных, который автоматически переноситс€ в регистр RDBUF. ќдновре≠менно устанавливаетс€ в Ђ1ї флаг завершени€ приема RI. Ѕит RI может быть считан под управлением программы, а если прерывани€ от приемника разрешены, то генери≠руетс€ запрос на прерывание. ¬ процессе выполнени€ подпрограммы прерывани€ при≠н€тый байт данных считываетс€ из регистра данных приемника RDBUF в пам€ть ћ . —разу после копировани€ байта данных из сдвигового регистра в RDBUF приемник мо≠жет начать формирование следующего байта данных, отдельные биты которого продол≠жают поступать на вход RxD. ќднако необходимо, чтобы центральный процессор ћ успел считать данные из буферного регистра RDBUF до завершени€ формировани€ в сдвиговом регистре следующего прин€того байта. ≈сли этого не произошло, то возник≠ша€ аварийна€ ситуаци€ в модул€х UART разрешаетс€ различными пут€ми. ¬ модул€х SCI фирмы ЂMotorolaї запись следующего прин€того байта в буферный регистр данных не производитс€ и устанавливаетс€ флаг ошибки OR (Overrun). Ётот флаг наравне с триг≠гером RI может генерировать запрос на прерывание от приемника. ¬ модул€х ћ Intel MSC-51 и ему полностью аналогичных така€ защита отсутствует: следующий прин€тый байт затирает предыдущий в регистре RDBUF.
|
|
|
ƒл€ повышени€ достоверности приема каждого разр€да аппаратные средства моду≠л€ UART считывают уровень сигнала на входе RxD три раза в течение интервала присут≠стви€ бита. «начение бита, которое будет занесено в младший разр€д сдвигового реги≠стра приемника, определ€етс€ мажоритарным способом: по принципу два из трех. ћодули SCI сообщают пользователю о наличии шума на линии приема: если не все три значени€ при приеме любого из битов кадра совпали, то устанавливаетс€ флаг NF (Noise Error). ¬ модул€х UART MK Intel MSC-51 така€ защита не предусмотрена.
ѕодсистемы приемника и передатчика модул€ UART не €вл€ютс€ полностью авто≠номными. —корость обмена и формат кадра асинхронной приемопередачи назначают≠с€ в процессе инициализации модул€ одинаковыми дл€ приемника и дл€ передатчика. ћодули UART различных ћ предоставл€ют неодинаковые возможности по регулиро≠ванию скорости обмена. ¬ ћ Intel MSC-51 допускаетс€ плавное регулирование с диск≠ретностью, равной периоду частоты тактировани€ таймера. ƒл€ задани€ скорости обмена используетс€ один из каналов модул€ таймера. Ќапротив, модуль SCI ћ Motorola не использует ресурсы модул€ таймера дл€ этих целей. “акой подход, с одной стороны, имеет преимущество по экономии использовани€ ресурсов ћ , однако, с дру≠гой стороны, не позвол€ет задать произвольное соотношение между частотой обмена и собственной частотой кварцевого резонатора генератора синхронизации ћ . ѕоследнее накладывает ограничени€ на выбор частоты кварцевого резонатора, если скорость обмена в разрабатываемом устройстве должна соответствовать стандартному р€ду.
¬се модули типа UART предусматривают два типа кадров асинхронного обмена, Ќа рис. 4.20 представлена временна€ диаграмма 10-битового кадра: 8 бит данных пере≠даютс€ вслед за стартовым битом, начина€ с младшего DO, завершает передачу стоповый бит

Ћогические уровни дл€ передачи стартового бита (низкий) и стопового бита (высокий) формируютс€ аппаратными средствами передатчика. ѕриемник распознает начало передачи нового кадра по изменению уровн€ сигнала на входе RxD с высокого, который может длитьс€ сколь угодно долго, на низкий. ѕередаваема€ в кадре полез≠на€ информаци€ длиною в один байт может кодироватьс€ абсолютно произвольно. Ќо может быть использовано и стандартное решение, при котором информаци€ кодируетс€ семью битами D6 - DO, старший бит D7 используетс€ дл€ контрол€ правильности при≠ема. — этой целью передающий ћ кодирует бит паритета D7 из услови€ четного (конт≠роль на четность) или нечетного (контроль на нечетность) числа единиц в передаваемом слове, а принимающий ћ производит проверку прин€того кода в соответствии с выб≠ранным способом кодировани€. ≈сли число единиц в байте данных соответствует выб≠ранному способу кодировани€, т. е. четное (нечетное), то передача считаетс€ успешной.
|
|
|
—ледует заметить, что не все модули UART 8-разр€дных ћ имеют опции автомати≠ческого формировани€ бита паритета и не контролируют прин€тое слово на четность или нечетность аппаратными средствами. ѕоэтому при необходимости эти операции дол≠жны быть реализованы программными средствами. –ассмотренный 10-битовый формат кадра наиболее часто используетс€ при организации св€зи встраиваемой ћѕ системы с системой управлени€ верхнего уровн€.
¬ременна€ диаграмма 11-битового кадра асинхронного обмена представлена на рис. 4.21: 9 бит данных обрамл€ютс€ одним стартовым и одним стоповым битом. ѕри формировании 9-разр€дного слова дл€ передачи сначала старший разр€д 08 поме≠щаетс€ в бит “8 одного из регистров управлени€ модулем, а затем младшие разр€ды 07 - DO записываютс€ в обычном пор€дке в регистр TDBUF. ѕри приеме 9-разр€дного слова младшие биты D7 - DO размещаютс€ в регистре RDBUF, старший бит D8 переда≠етс€ в разр€д R8 одного из регистров управлени€. –ассматриваемый формат представ≠лени€ кадра обычно используетс€ дл€ организации протокола обмена верхнего уровн€ в локальных сет€х на основе нескольких ћ . — этой же целью в модул€х UART реализо≠ван специальный режим ожидани€ с механизмом пробуждени€ (Wake-up).

|
Ќа рис. 4.22 приведена структура такой локальной сети. ќдин из ћ в этой сети €вл€ет≠с€ ведущим, все остальные - ведомыми. ¬ каждый момент времени обмен возможен меж≠ду ведущим и одним из ведомых, обмен между двум€ ведомыми не реализуетс€. »нициа≠тором обмена всегда €вл€етс€ только ведущий. ќбмен производитс€ пакетами, каждый из которых включает не менее трех 11-битовых кадров. ѕервый кадр определ€ет адрес ведомого ћ , с которым будет производитьс€ обмен. Ѕит D8 этого кадра должен быть равен Ђ1ї.
—ледующий кадр используютс€ дл€ обмена данными с выбранным ведомым.

|
–ис. 4.22. —труктура локальной сети микро≠контроллера
Ѕит D8 этих кадров должен быть установлен в Ђ0ї. ѕоследний кадр пакета обмена дол≠жен содержать 11 нулевых битов. “ак как подобна€ последовательность не может быть сформирована в результате записи в регистр буфера передатчика TDBUF нулевого слова | (необходимо также обнулить стоповый бит), то дл€ ее воспроизведени€ предусмотрена специальна€ опци€ формировани€ сигнала ЂBreakї. ¬ модул€х SCI дл€ ее реализации необходимо установить бит SBK (Send Break) в одном из регистров управлени€. ќбмен между ведущим и ведомым происходит в следующем пор€дке.
Х ¬ исходном состо€нии приемники всех ведомых ћ наход€тс€ в состо€нии ожидани€.
¬ этом состо€нии прием байта данных осуществл€етс€, но прин€тое слово переписы≠ваетс€ в буферный регистр RDBUF с одновременной установкой в Ђ1ї флага завер≠шени€ приема RI только в том случае, если бит D8 этого слова равен Ђ1ї. ќстальные слова с признаком D8 = 0 игнорируютс€.
Х ¬едущий ћ посылает всем ведомым одновременно первый кадр пакета обмена. –аз-р€ды D7 - DO этого кадра содержат адрес ведомого, бит D8 равен Ђ1ї.
Х ¬се ведомые ћ принимают это 9-разр€дное слово, и, поскольку разр€д D8 кадра равен Ђ1ї, приемник модул€ UART каждого ћ выходит из состо€ни€ ожидани€. ‘ор≠мируетс€ запрос на прерывание. ѕодпрограмма обработки этого прерывани€ срав≠нивает прин€тый адрес с собственным адресом в локальной сети. ≈сли адреса совпа≠дают, т. е. ведущий будет производить обмен именно с этим ведомым, то ћ ожидает
передачи от ведомого следующего кадра. ≈сли адреса не совпадают, то ћ посред≠ством специального бита управлени€ переводит приемник модул€ UART снова в режим ожидани€. “огда все следующие кадры пакета обмена этим ћ восприн€ты не будут, поскольку они содержат нулевой разр€д D8.
Х ¬едущий ћ передает ведомому необходимое число байтов, сопровожда€ каждый из них признаком данных D8 = 0. ѕри необходимости ведущий принимает данные от ведо≠мого. ќ завершении обмена ведущий информирует ведомый посылкой сигнала ЂBreakї.
Х ¬едомый в ответ на сигнал ЂBreakї переводит приемник модул€ UART в состо€ние ожида≠ни€. Ћокальна€ сеть приведена в исходное состо€ние и готова к передаче нового пакета.
роме рассмотренных режимов асинхронного обмена, многие из модулей UART под≠держивают режим синхронной приемопередачи. “ак, вћ ћ«—-51 контроллер последова≠тельного интерфейса реализует полудуплексный обмен в синхронном режиме, при кото≠ром импульсы синхронизации выдаютс€ на линию TxD, данные передаютс€ или принима≠ютс€ по линии RxD (см. 4.2.7). ¬ажно отметить, что при синхронном обмене модуль UART ћ MSC-51 может работать только в ведущем режиме, т. е. именно этот модуль формирует импульсы синхронизации независимо от направлени€ обмена. ћодуль SCI ћ ћ—68Ќ—705¬16 (модуль типа UART) реализует симплексный синхронный обмен, при ко≠тором возможно только одно направление передачи данных: из ћ к периферийной »—.
|
|
|
Ѕольшинство ћ фирмы ЂMotorolaї имеют в своем составе контроллер последователь≠ного интерфейса SPI (Serial Peripheral Interface). —тандарт SPI предложен фирмой ЂMotorolaї. ќн предназначен дл€ св€зи ћ с периферийными устройствами ћѕ системы. Ќаиболее часто эти устройства расположены на одной плате с ћ , реже - это вынесенные пульты управлени€, индикаторные панели и т. п.

|
–ис. 4.23. —опр€жение ћ с периферийными »— посред≠ством интерфейса SPI
¬ качестве пе≠риферийных устройств могут использоватьс€ как простей≠шие сдвиговые регистры, так и сложные периферийные »— со встроенными контроллера≠ми управлени€, такие как ÷јѕ, сигма-дельта ј÷ѕ с цифровой фильтрацией, последова≠тельные запоминающие устройства типа FLASH или EEPROM, энергонезависимые ќ«” и т. д. ¬ редких случа€х интерфейс SPI используетс€ дл€ обмена данными между не≠сколькими ћ системы.
Ќа рис. 4.23 представлена структурна€ схема сопр€жени€ ћ и двух периферийных »— с использованием интерфейса SPI. ¬ рассматриваемом примере ћ €вл€етс€ веду≠щим устройством, он инициирует обмен при передаче информации между ћ и одной из периферийных »—. ажда€ из периферийных »— €вл€етс€ устройством ведомым. SPI- шина представлена трем€ общими лини€ми св€зи (MISO, MOSI, SCK) и двум€ лини≠€ми выбора ведомого устройства (SS1, SS2), которые индивидуальны дл€ каждой пери≠ферийной »—:
MOSI - лини€ передачи данных от ведущего к ведомому (Master Output Slave Input); MISO - лини€ передачи данных от ведомого к ведущему (Master Input Slave Output);
SCK-лини€ сигнала стробировани€ данных;
SS1 и SS2-линии сигналов выбора ведомого устройства.
ак видно из рис. 4.23, образованна€ на основе интерфейса SPI мини-сеть относитс€ к классу магистрально-радиальных. Ћинии передачи данных и лини€ синхронизации €в≠л€ютс€ примером шинной организации, а линии выбора ведомого устройства - элемент системы радиального типа. ѕеред началом обмена (рис. 4.24) ведущее устройство отме≠чает одно ведомое устройство, с которым будет производитьс€ обмен. ƒл€ этого на линии выбора устройства SSi устанавливаетс€ низкий активный уровень сигнала. «атем ведущее устройство последовательно выставл€ет на линию MOSI восемь бит информа≠ции, сопровожда€ каждый бит сигналом синхронизации SCK ¬едомое устройство дешифрирует переданный байт информации и определ€ет, в каком направлении будет про≠изводитьс€ дальнейший обмен. ≈сли ведомое устройство должно принимать информа≠цию, то ведущее устройство, не снима€ сигнала выбора ведомого SSi, продолжит пере≠дачу по линии MOSI. ≈сли ведомое устройство должно передавать информацию, то оно активизирует линию MISO и в ответ на каждый импульс синхронизации от ведущего бу≠дет выставл€ть один бит информации. ƒлина посылки обмена в общем случае не огра≠ничена, но дл€ правильной работы модул€ SPI должна составл€ть целое число байтов. «авершение обмена также инициируетс€ ведущим посредством установки в неактивное состо€ние сигнала выбора ведомого SSi.

|
ƒл€ подключени€ к SPI-шине встроенный контроллер SPI имеет четыре вывода: MOSI, MISO, SCK, SS. ћодули контроллеров SPI фирмы ЂMotorolaї могут работать как в веду≠щем, так и в ведомом режимах. —корость приема и передачи определ€етс€ частотой тактировани€ межмодульных магистралей ћ fBUS: в ведущем режиме скорость обмена не может превышать /gus/2, в ведомом режиме максимальна€ скорость обмена равна fgus. ѕоэтому дл€ ћ семейства Ќ—05 максимальна€ скорость обмена в ведущем режиме составл€ет 1 ћбит/с, в ведомом - 2 ћбит/с. јналогичные показатели дл€ ћ семейства Ќ—08 соответственно 4 и 8 ћбит/с.
ѕри работе встроенного контроллера в ведущем режиме к выводу MOSI подклю≠чаетс€ выходна€ лини€ данных, а к MISO - входна€. ѕри работе в ведомом режиме выво≠ды мен€ютс€ рол€ми. ¬ывод SCK €вл€етс€ выходом, если контроллер SPI работает в ведущем режиме, и входом, если - в ведомом. ¬ системах с несколькими ведущими устройствами все выводы SCK соедин€ютс€ вместе. “о же делаетс€ с выводами MOSI и MISO. Ќа врем€ отсутстви€ св€зи буферы выводов встроенного контроллера SPI пе≠ревод€тс€ в высокоимпедансное состо€ние. ѕоследнее позвол€ет избежать конфликтов на шине SPI. ¬ противном случае несколько выводов MISO ведомых устройств одно≠временно были бы активными, что не позволило бы ведущему устройству произвести прием достоверной информации.
¬ывод SS встроенного контроллера SPI используетс€ в зависимости от того, в каком режиме работает данное устройство. ѕри работе в ведомом режиме при подаче высокого уровн€ сигнала на вход SS устройство игнорирует сигналы SCK и удерживает вывод MISO в высокоимпедансном состо€нии. ≈сли же в ведомом режиме работы на вхо≠де SS установлен низкий логический уровень, то буферы линий MOSI и SCK разворачива≠ютс€ на ввод, лини€ MISO - на вывод. ѕри работе в ведущем режиме вывод SS может быть использован как обычна€ лини€ вывода. ¬ системах со сложной логикой работы этот вывод может использоватьс€ как вход сигнала обнаружени€ ошибки дл€ индикации состо≠€ни€ шины в случа€х, если более чем одно устройство пытаетс€ стать ведущим.
—хема управлени€ контроллера SPI интерфейса позвол€ет выбрать один из двух про≠токолов обмена и пол€рность импульсов синхронизации SCK. ѕри работе в ведущем режиме возможно также программно выбрать частоту импульсов синхронизации.
ƒва бита регистра управлени€ любого контроллера SPI интерфейса определ€ют вре≠менную диаграмму обмена по шине SPI:
1) бит —–Ќј назначает протокол обмена;
2} бит CPOL определ€ет пол€рность сигнала синхронизации SCK.
¬ соответствии с комбинацией битов CPHA:CPOL прин€то различать четыре режима работы интерфейса SPI. омбинации CPHA:CPOL = 00 соответствует режим 0, комбина≠ции CPHA:CPOL =11Ч режим 3. ¬строенный контроллер SPI ћ позвол€ет программно настраивать режим SPI в процессе инициализации, в то врем€ как периферийные »— ре≠ализуют один или два режима SPI, которые определ€ютс€ их техническим описанием. Ќаи≠более часто это режимы 0 и 3.
Ќа рис. 4.25 представлены временные диаграммы сигналов дл€ протокола пере≠дачи —–Ќј = 0. ƒл€ сигнала SCK привод€тс€ две диаграммы, различающиес€ пол€р≠ностью сигнала.
ѕерва€ соответствует режиму 0, втора€ - режиму 1. ƒиаграммы относ€тс€ как к веду≠щему, так и к ведомому устройству, поскольку выводы MISO и MOSI ведущего соединены с аналогичными выводами ведомого. —игнал SS подаетс€ только на ведомое устрой≠ство. ѕоэтому вывод SS у ведущего остаетс€ незадействованным и его диаграмма не представлена, но имеетс€ в виду, что она соответствует неактивному состо€нию. ¬строен≠ные контроллеры SPI выполнены таким образом, что длина посылки составл€ет один байт, что и отражено на временных диаграммах.
Ќачало обмена рассматриваемого протокола определ€етс€ установкой сигнала выбора ведомого SS в активное состо€ние SS = 0. ѕри направлении передачи от ведущего к ведомому первый перепад сигнала синхронизации SCK используетс€ ведомым устрой≠ством дл€ запоминани€ очередного бита во внутреннем сдвиговом регистре контроллера SPI. ¬едущий выставл€ет очередной бит посылки на линии MOSI по каждому четному фронту сигнала SCK. ѕри передаче данных от ведомого к ведущему старший бит переда≠ваемого байта должен быть выставлен ведомым на линию MISO сразу после изменени€ уровн€ сигнала SS = 0. ѕо первому фронту SCK уровень сигнала на линии MISO будет запомнен в младшем разр€де сдвигового регистра ведущего устройства. ѕо этой причине сигнал на линии выбора ведущего должен быть возвращен в неактивное состо€ние SS = 1 после передачи каждого байта в любом направлении. “огда передача каждого нового бай≠та будет сопровождатьс€ предварительной
установкой SS в Ђ0ї


Ќачало обмена дл€ протокола опции —–Ќј = 1 (рис. 4.26) определ€ет первое измене≠ние уровн€ сигнала на линии SCK после установки сигнала выбора ведомого SS в актив≠ное состо€ние SS = 0. ѕри передаче данных от ведущего к ведомому и в обратном на≠правлении все нечетные перепады SCK вызывают выдвижение очередного бита посыл≠ки из сдвигового регистра передатчика на линию. аждый четный перепад используетс€ дл€ записи этого бита в сдвиговый регистр приемника. —игнал выбора ведомого может оставатьс€ в активном состо€нии SS = 0 в течение передачи нескольких байт информа≠ции. Ёто несколько упрощает логику программного драйвера SPI.
–ассмотренные протоколы обмена не имеют различий по скорости и надежности пе≠редачи информации. ¬ыбор протокола диктуетс€ периферийным устройством. ¬ неко≠торых случа€х пол€рность и фаза сигнала SCK измен€ютс€ между передачами дл€ того, чтобы обеспечить св€зь с устройствами, имеющими различный протокол. ѕример кон≠троллера SPI рассмотрен в п. 4.3.9.
»нтерфейс I2C €вл€етс€ двухпроводным последовательным интерфейсом, разрабо≠танным фирмой ЂPhilips Corporationї.
ќсновными свойствами интерфейса PC €вл€ютс€ следующие:
Х двунаправленна€ передача данных между главными и подчиненными устройствами;
Х многоабонентска€ шина (центрального главного узла в сети может не быть);
Х арбитраж между одновременно передающими устройствами без разрушени€ целост≠ности передаваемых данных;
Х последовательна€ тактова€ синхронизаци€ позвол€ет приборам с различными скоро≠ст€ми передачи битов осуществл€ть св€зь через одну последовательную шину;
Х последовательна€ тактова€ синхронизаци€ может использоватьс€ в качестве механизма квитировани€ установлени€ св€зи, чтобы приостанавливать и возобновл€ть пос≠ледовательную передачу.
ћагистраль интерфейса I2C использует две линии дл€ передачи информации между приборами:
1)SDA - двунаправленную линию данных;
2)SCL - линию сигнала стробировани€ данных.
“ипова€ конфигураци€ PC-шины показана на рис. 4.27.

¬ протоколе интерфейса I 2C каждое устройство имеет адрес. огда ведущее устрой≠ство желает инициировать передачу данных, оно передает адрес устройства, с которым будет производить обмен. ¬се устройства на шине след€т за выставл€емым на шину адресом и сравнивают его с собственным адресом. ¬месте с адресом передаетс€ бит направлени€ передачи R/W, который определ€ет, будет ли ведущий читать из ведомо≠го или будет писать в него. ѕри R/W = 0 реализуетс€ режим записи в ведомое устрой≠ство. ѕри R/W = 1 реализуетс€ режим чтени€ из ведомого устройства. »нтерфейс I2C поддерживает два формата передачи адреса. ѕростейший - 7-битный формат с битом R/W в младшем разр€де передаваемого байта (рис. 4.28). Ѕолее сложным €вл€етс€ 10-битный формат.
¬ зависимости от направлени€ передачи возможны два типа обмена данными дл€ I 2C шины.
1.ѕередача данных от главного передатчика к подчиненному приемнику. ѕервый байт,передавае-
мый передатчиком, €вл€етс€ адресом подчиненного приемника. «атем следу≠ет несколько байтов данных. ѕодчиненный приемник возвращает бит подтверждени€ после каждого прин€того байта.
2.ѕередача данных от подчиненного передатчика к главному приемнику. ѕервый байт
(адрес подчиненного передатчика) передаетс€ главным устройством. «атем подчинен≠ный передатчик возвращает бит подтверждени€. —ледующие несколько байтов данных
передаютс€ подчиненным устройством главному. √лавное устройство возвращает бит
подтверждени€ после каждого прин€того байта, кроме последнего. ¬ конце последнего
прин€того байта возвращаетс€ Ђнет подтверждени€ї.
огда нет передачи данных, реализуетс€ режим ожидани€: линии тактировани€ SCL и данных SDA приведены подт€гивающими резисторами к высокому уровню логического сигнала.

¬едущее (главное) устройство генерирует все последовательные синхроимпульсы и услови€ START и STOP, определ€ющие начало и конец передачи данных. ”словие START определ€етс€ как переход SDA из высокого уровн€ в низкий при высоком уровне SCL, а условие STOP - как переход SDA из низкого уровн€ в высокий при высоком уровне SCL (рис. 4.29). ¬виду такого способа определени€ условий START и STOP при передаче данных лини€ SDA может измен€ть свое состо€ние только при низком уровне SCL.
ћодуль контроллера интерфейса 12—, который удовлетвор€ет спецификации 12—-шины и поддерживает два вышеперечисленных типа передачи данных, может работать в сле≠дующих четырех режимах.
1. –ежим главного передатчика. ѕоследовательный вывод данных через выход SDA
передатчика, в то врем€ как на выходе SCL передатчика формируютс€ последователь≠ные синхроимпульсы. ѕервый переданный байт содержит адрес подчиненного приемно≠го устройства (7 бит) и бит направлени€ данных R/W = 0. ¬ этом случае говор€т, что
передаетс€ ЂWї. “аким образом, первый переданный байт представл€ет собой адрес
подчиненного приемника плюс ЂWї. ѕоследовательные данные передаютс€ по 8 бит.
ѕосле отправки каждого байта главный передатчик ожидает от подчиненного устройства
бит подтверждени€ ASK. ”слови€ START и STOP формируютс€ ведущим (главным)
устройством дл€ указани€ начала и конца сеанса последовательного обмена посылкой,
состо€щей в общем случае из нескольких байтов.
2. –ежим главного приемника. ѕервый переданный приемником байт содержит ад≠рес подчиненного передающего устройства (7 бит) и бит направлени€ данных R/W = 1.
¬ этом случае говор€т, что передаетс€ ЂRї. “аким образом, первый переданный прием≠ником байт представл€ет собой адрес подчиненного передатчика плюс ЂRї. ѕоследовательные данные передаютс€ по линии SDA от ведомого (подчиненного) устройства
к ведущему (главному), в то врем€ как импульсы синхронизации на линии SCL формиру≠ет ведущий. ѕоследовательные данные передаютс€ по 8 бит. ѕосле того, как ведущий
(главный) прин€л очередной байт, он выставл€ет на линию сигнал подтверждени€ приема ASK. —игналы START и STOP формируютс€ ведущим.
3. –ежим подчиненного приемника. ѕоследовательные данные и синхроимпульсы передаютс€ по лини€м SDA и SCL на одноименные входы подчиненного приемника. ѕосле
того, как прин€т каждый байт, приемник анализирует наличие на линии бита подтверждени€ ASK, который формирует передатчик. ”слови€ START и STOP формируютс€ передат≠чиком. –аспознавание адреса выполн€етс€ аппаратными средствами модул€ приемника
после приема адреса подчиненного устройства и бита направлени€.
4. –ежим подчиненного передатчика. ѕервый байт принимаетс€ и обрабатываетс€
подчиненным передатчиком так же, как и в режиме подчиненного приемника. ќднако бит
направлени€ в прин€том байте будет указывать, что направление обмена должно быть
изменено на обратное. ƒалее последовательные данные передаютс€ по линии SDA
с одноименного выхода подчиненного (ведомого) передатчика, в то врем€ как синхроим≠пульсы принимаютс€ им по входу SCL от главного приемника. ѕосле передачи каждого
байта подчиненный передатчик анализирует наличие на линии бита подтверждени€ ASK.
”слови€ START и STOP формирует главный приемник.
¬ подчиненном режиме аппаратные средства контроллера PC-интерфейса осуществ≠л€ют поиск своего собственного подчиненного адреса или адреса общего вызова. ≈сли детектируетс€ один из этих адресов, запрашиваетс€ прерывание. огда микроконтроллер желает, чтобы шина стала главной, аппаратные средства ожидают, пока шина освободит≠с€. ¬озможное функционирование в качестве подчиненного при этом не прерываетс€. ≈сли арбитраж шины потер€н в главном режиме, то соответствующий контроллер PC пе≠реключаетс€ в подчиненный режим немедленно и может детектировать свой собственный подчинЄнный адрес

|
–азработанный в середине 1980-х фирмой ЂBoschї дл€ систем управлени€ узлами автомобил€, протокол CAN (Controller Area Network - сеть контроллеров) €вл€етс€ пос≠ледовательным протоколом высокоскоростной и высоконадежной передачи данных в широковещательном (broadcast) режиме в мультимастерной среде. ”дачное сочетание низкой стоимости подключени€, простоты и надежности с доступностью элементной базы и инструментальных средств разработки - одни из основных достоинств CAN-технологии. ѕоложени€ стандарта, закрепленные в используемой на сегодн€ спецификации 2.0ј/¬ фирмы ЂBoschї и международном стандарте ISO 11898, соответствуют двум на≠чальным уровн€м (физическому и канальному) 7-уровневой модели взаимодействи€ открытых систем ISO/OSI. –€д оригинальных технических решений, реализованных при разработке протокола, наилучшим образом позволили сориентировать его на решение задач контрол€ и управлени€.
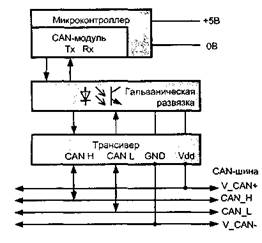
—труктура CAN-сети представлена на рис. 4.30. Ўинна€ топологи€, €вл€юща€с€ основой CAN, требует наличи€ механизма адресации узлов, однако в CAN нет адре≠сов как таковых: сообщение принимаетс€ всеми узлами. Ћюбое передаваемое сообще≠ние имеет определ€ющий его содержание уникальный идентификатор (ID), на основа≠нии которого каждый узел фильтрует Ђсвоиї сообщени€ и Ђрешаетї, реагировать или нет на сообщение, транслируемое в данный момент. Ќеоспоримыми преимуществами отсутстви€ адресации €вл€ютс€ теоретически неограниченное число узлов и простота их добавлени€ и отключени€.
|
|
с 18-битным расширением) с тео≠ретически возможным числом типов сообщений более 536 млн. ‘реймы, соответствую≠щие стандартному и расширенному форматам сообщений, приведены на рис. 4.31.
Ѕит RTR (Remote Transmission Request - запрос передачи данных) дл€ фрейма дол≠жен иметь доминантный уровень. ¬ расширенном формате фрейма бит SRR (Substitute Remote Request) с рецессивным уровнем замен€ет следующий (в стандартном форма≠те) за 11-разр€дным идентификатором бит RTR. Ѕит распознавани€ формата фрейма IDE (ID Extension) имеет доминантный уровень дл€ стандартного формата фрейма и рецессивный -дл€ расширенного. Ѕиты r0 и r1 - резервные.
¬ поле управлени€ (Control Field) содержитс€ 4-разр€дный код, задающий длину пол€ данных (0-8 байт) - DLC - Data Lenght Code. ѕоле контрольной суммы CRC Field включает в себ€ контрольную сумму сообщени€ (15 бит) и бит-разделитель. ¬ поле под≠тверждени€ ј— (Acknowledgement) передающий узел всегда выставл€ет рецессивный уровень. ¬ случае, если передача прошла успешно, приемный узел сигнализирует об этом установкой в этом поле доминантного уровн€.
Ќачинаетс€ фрейм доминантным битом SOF (Start of Frame), служащим также дл€ синхронизации битового потока, а заканчиваетс€ семью битами рецессивного уровн€ пол€ EOF (End of Frame) и 3-битным того же уровн€ промежутком между фреймами.
ƒл€ исключени€ потери синхронизации при передаче длинной последовательности одинако≠вых битов в пределах полей начала фрейма, арбитража, управлени€, данных и конт≠рольной суммы используетс€ битстаффинг - вставка дополнительного бита противопо≠ложного значени€ после подр€д идущих п€ти одинаковых. ѕри приеме производитс€ об≠ратна€ (дебитстаффинг) операци€.

|
ƒл€ запроса данных от удаленного узла служит фрейм запроса данных Remote Frame, также имеющий стандартный и расширенный форматы. ќтличи€ фрейма запроса дан≠ных от фрейма данных - в отсутствии пол€ данных и рецессивном уровне бита RTR. ѕри получении фрейма запроса данных запрашиваемый узел отвечает передачей фрейма данных.
—игнализаци€ об ошибках происходит посредством передачи фрейма Error Frame. ќн инициируетс€ любым узлом (в CAN правильность передачи контролируетс€ каждым узлом), обнаружившим ошибку.
Ўесть доминантных бит флага ошибки (активный флаг ошибки) перекрывают остаток ошибочно переданного фрейма и создают глобальную ошибку в сети - ошибку битстаффинга, котора€ воспринимаетс€ остальными узлами, если им не удалось обнаружить пер≠воначальную (локальную) ошибку. ƒалее они выставл€ют свои флаги ошибки. ¬виду этого обсто€тельства последовательность доминантных бит (суперпозици€ флагов ошибки) мо≠жет иметь длину от 6 до 12 бит. Ќенадежным или частично поврежденным узлам (см. ниже) при обнаружении ошибки разрешено посылать лишь пассивный флаг ошибки - последо≠вательность шести рецессивных бит.
ƒл€ задержки передачи данных или посылки фрейма запроса данных (при неготовно≠сти приемника или наличии доминантных бит в промежутке между фреймами) служит фрейм перегрузки Overload Frame. ¬ отличие от фрейма ошибки он не вли€ет на счетчик ошибок и не вызывает повторную передачу сообщени€.
Ќесколько необычно решаетс€ проблема коллизий (столкновений в сети), присуща€ шинной топологии. ¬ этом случае снова используетс€ идентификатор сообщени€ в соче≠тании со схемой подключени€ к шине типа Ђмонтажное »Ћ»ї, где узел, выставл€ющий на шину Ђќї - доминантный уровень, подавл€ет Ђ1ї - рецессивный уровень, выставлен≠ный другим узлом. ѕобедителем в арбитраже €вл€етс€ узел, имеющий идентификатор с наименьшим численным значением и, как следствие, наивысший приоритет. “олько победивший узел продолжает передачу данных, остальные пытаютс€ сделать это позже. Ќа рис. 4.68 нагл€дно отражена процедура арбитража при попытке передачи сообщений одновременно четырьм€ узлами сети.
ѕодобный режим доступа к шине известен как CSMA/CD+AMP (Carrier Sense Multiple Access with Collision Detection and Arbitration on Message Priority) - множественный дос≠туп с контролем несущей, обнаружением коллизий и арбитражем на основе приоритета сообщений. Ётот режим не позвол€ет поспорившим узлам устраивать столкновение на шине, а сразу вы€вл€ет победител€. CAN-протокол, изначально разработанный специ≠ально дл€ систем управлени€ жизненно важными узлами автомобилей, критичных к уров≠ню безопасности и степени достоверности передаваемых данных, обладает эффектив≠ными средствами обнаружени€ ошибок.
¬ отличие от других сетевых протоколов, в CAN не используютс€ подтверждающие сообщени€, а при обнаружении одной или более ошибок хот€ бы одним узлом (в CAN все узлы принимают все сообщени€ и участвуют в проверке сообщени€ на наличие ошибок -вычисл€ют контрольную сумму и т. п.) текуща€ передача прерываетс€ (при условии, что ошибку обнаружил как минимум один узел со статусом Error Active) генерацией фрейма ошибки с флагом ошибки. ѕередатчик, сообщение которого было прервано, повтор€ет передачу.
4.2. —≈ћ≈…—“¬ќ ћ MCS-51 ‘»–ћџ ЂINTELї
ј–’»“≈ “”–ј ћ 8051 јЌ
Ќа рис. 4.32 приведена внутренн€€ структура ћ 8051 јЌ фирмы ЂIntelї, с которого началось семейство MCS-51 (отечественный аналог 1816¬≈51). онтроллер включает следующие модули:
Х центральный процессор CPU MCS-51; разр€дность обрабатываемого слова состав≠л€ет один байт;
Х внутреннюю пам€ть программ объемом 4096 однобайтовых €чеек пам€ти
(4 байта);
Х внутреннюю пам€ть данных объемом 128 однобайтовых €чеек;
Х четыре 8-разр€дных параллельных порта ввода/вывода; _
Х два 16-разр€дных программируемых таймера;
Х последовательный порт;
Х схему формировани€ сигналов внешней мультиплексированной магистрали адрес/
данные и внешней магистрали управлени€.

ќбмен информацией между модул€ми осуществл€етс€ по 8-разр€дной внутренней магистрали.
ћ семейства MCS-51 используют гарвардскую архитектуру: пам€ть программ (ѕ«”) и пам€ть данных (ќ«”) имеют раздельное адресное пространство. », как следствие, дл€ обращени€ к €чейкам пам€ти разного типа должны быть использованы разные типы ко≠манд. ћаксимальный размер адресного пространства дл€ каждого типа пам€ти состав≠л€ет 64 байта. ќднако непосредственно на кристалле ћ 8051 јЌ располагаютс€ толь≠ко 4 Ђбайта ѕ«” и 128 байт ќ«”. ћ семейства MCS-51 имеют открытую архитектуру, т.е. позвол€ют подключать внешнюю пам€ть. ѕоэтому при необходимости, как пам€ть про≠грамм, так и пам€ть данных могут быть увеличены посредством подключени€ дополни≠тельных микросхем пам€ти.
¬арианты организации пам€ти в ћѕ системе на основе ћ 8051 јЌ по€сн€ет рис. 4.33. ћ может быть использован в однокристальном режиме (сигнал на линии ≈ј равен 1). “огда внешн€€ пам€ть в системе отсутствует, пам€ть программ располагает≠с€ по адресам 0000h...0FFFh, пам€ть данных - с 00h no 7Fh. –егистры специальных функций периферийных модулей имеют объединенное с внутренним ќ«” адресное пространство. ќни расположены по адресам 80h...0FFh. ƒаже если ћ 8051 јЌ работа≠ет в однокристальном режиме, к нему может быть подключена внешн€€ пам€ть про≠грамм. ќна должна располагатьс€ в диапазоне адресов 1000h-0FFFFh, т. е. дополн€ть внутреннее ѕ«” ћ . ≈сли ћ работает в расширенном режиме (сигнал на линии ≈ј равен 0), то он будет адресовать только внешнюю пам€ть программ - с 0000h no 0FFFFh, несмотр€ на то, что внутреннее (резидентное) ѕ«” на кристалле имеетс€.
¬ каждом из рассмотренных режимов ћ 8051 јЌ может использовать два массива пам€ти данных: внутреннее ќ«”, расположенное по адресам 00h... 7Fh, и подключаемое внешнее ќ«”, или ѕ«”, которое может располагатьс€, начина€ с адреса 0000h вплоть до 0FFFFh. He следует бо€тьс€ возможного перекрыти€ адресного пространства внутрен≠ней и внешней пам€ти данных. ƒоступ к ним осуществл€етс€ разными командами.


¬ архитектуре MCS-51 адресное пространство внутренней пам€ти данных объедин€≠ет все программно доступные ресурсы ћ , в том числе регистры центрального процес≠сора. ѕространство внутренней пам€ти данных делитс€ на пространство адресов внут≠реннего ќ«” и пространство адресов регистров специальных функций (рис. 4.34).
¬ области ќ«” выдел€ют три сегмента.
1.ћладшие 32 адреса занимают четыре регистровых банка, каждый из которых содер≠жит по 8 регистров общего назначени€ RO - R7. ѕри обращении к €чейкам пам€ти этого сегмента могут быть использованы как абсолютные адреса 00h - 1Fh, так и символьные
имена регистров RO - R7. ƒл€ выбора одного регистра из четырех, имеющих одно им€, используетс€ механизм задани€ текущего банка регистров. Ќомер банка, на 8 €чеек кото≠рого в данный момент времени распростран€ютс€ имена R0 - R7, определ€етс€ значени≠ем битов RS1:RS0 регистра признаков PSW.
2.ячейки пам€ти с адресами 20h - 2Fh допускают побитное обращение. ѕр€мо адресуемые биты имеют адреса 00h Ч 7Fh. “аким образом, обращение к данным, располо≠женным в €чейках пам€ти с адресами 20h - 2Fh, может быть осуществлено как в байто≠вом, так и в битовом формате
3. ячейки пам€ти с адресами 30h - 7Fh допускают обращение только посредством абсолютных адресов, данные доступны только в байтовом формате.
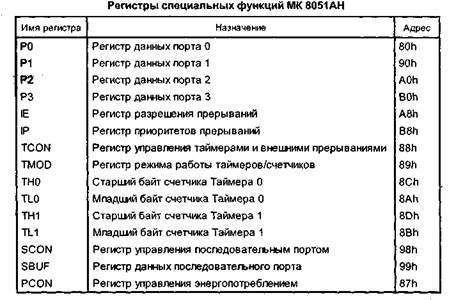
ќбласть пам€ти с адресами 80h - OFFh занимают регистры специальных функций: регистры данных портов ввода/вывода –0, –1, –2, –«, регистры задани€ режимов рабо≠ты других периферийных модулей. ќбратите внимание, что в этом же адресном про≠странстве расположены регистры центрального процессора: аккумул€тор ј——, ре≠гистр ¬, регистр состо€ни€ PSW, старший DPH- и младший DPL-байты двухбайтового регистра DPTR, указатель стека SP. Ѕольша€ часть регистров специальных функций, а также ј——, ¬ и PSW допускают побитное обращение. ѕр€моадресуемые биты имеют адреса с 80h no OFFh. ‘ормат регистров специальных функций будет рассмотрен в раз≠делах, посв€щенных соответствующим периферийным модул€м. »з рис. 4.34 видно, что не все адресное пространство области 80h - 0FFh использовано, имеютс€ свободные адреса. ¬ верси€х ћ с €дром MCS-51, но с большим по сравнению с моделью 8051 јЌ набором периферийных модулей эти адреса используютс€ дл€ размещени€ дополни≠тельных регистров специальных функций. ѕеречень регистров специальных функций ћ 8051јЌ приведен в табл. 4.4.
“аблица 4.4