




На рис. 8 приведена схема цепи переменного тока с емкостным элементом (конденсатором).

Рис. 8.
Под действием синусоидального напряжения u = Um sin ωt в цепи с емкостным элементом протекает ток

| (19) |
где С – емкость; q – заряд на электродах емкостного элемента.
Из выражения (19) видно, что в цепи с емкостным элементом ток опережает по фазе напряжение на угол 90º (π/2) (см. рис. 8).
В цепи переменного тока емкостный элемент обладает сопротивлением, которое называется емкостным и обозначается ХС.
 . .
| (20) |
В системе СИ сопротивление XC измеряется в омах (Ом).
Математическое выражение закона Ома для этой цепи
 . .
| (21) |
Мгновенная мощность в цепи с емкостным сопротивлением будет в противофазе с мгновенной мощностью в цепи с индуктивным элементом

| (22) |
Анализ приведенных формул показывает, что в цепи с емкостью (как и в цепи с индуктивностью) мощность в первую четверть периода забирается из сети и запасается в электрическом поле конденсатора, а в следующую четверть периода возвращается в сеть. Для количественной характеристики интенсивности обмена энергией между источником и конденсатором служит реактивная мощность
| QС=I2XС. | (23) |
Энергия, запасаемая в электрическом поле конденсатора,
 . .
| (24) |
Анализ неразветвленной цепи переменного тока
Цепь с активным сопротивлением, индуктивностью и емкостью представляет собой общий случай последовательного соединения активных и реактивных сопротивлений (рис. 9).
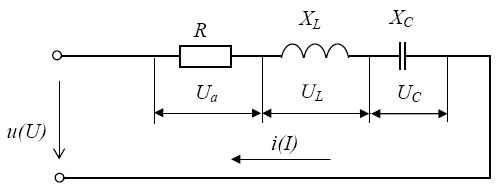
Рис. 9.
При прохождении тока в цепи на каждом элементе возникает падение напряжения:
| (25) |
Для каждого элемента цепи угол сдвига по фазе между током и напряжением имеет свое значение. Вектор приложенного к схеме напряжения U определится как сумма векторов напряжений на отдельных элементах схемы. Для рассматриваемой одноконтурной схемы в соответствии со вторым законом Кирхгофа справедливо уравнение

| (26) |
Для анализа работы данной цепи построим векторную диаграмму (рис. 10). Перед построением выбирается масштаб для тока и напряжения. Построение векторной диаграммы начинают с вектора той величины, которая является общей для всех элементов цепи. В данном случае при последовательном соединении общей величиной для всех элементов цепи является ток. Поэтому первым проводим вектор тока. Вектор напряжения на активном сопротивлении совпадает по фазе с вектором тока. Вектор напряжения на индуктивном сопротивлении опережает вектор тока на угол 90º, а вектор напряжения на емкостном сопротивлении отстает от вектора тока на угол 90º.

Рис. 10.
Знак перед углом сдвига фаз φ зависит от режима цепи. Если в рассматриваемой цепи преобладает индуктивное сопротивление, то
| UL>UC. | (27) |
В этом случае нагрузка имеет активно-индуктивный характер, а напряжение U опережает по фазе ток I (угол φ положительный).
Если в цепи преобладает емкостное сопротивление, то
| UL<UC. | (28) |
В этом случае нагрузка имеет активно-емкостный характер, а напряжение U отстает по фазе от тока I (угол φ отрицательный).
Выделим из векторной диаграммы треугольник напряжений (рис. 11), из которого следует:

 , ,  . .
| (29) |
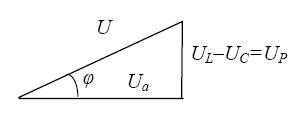 Рис. 11.
Рис. 11.
Закон Ома для неразветвленной цепи запишется в виде

| (30) |
где Z – полное сопротивление неразветвленной цепи,
| (31) |
Если стороны треугольника напряжений разделить на силу тока, получится треугольник сопротивлений; если стороны треугольника напряжений умножить на силу тока, получится треугольник мощностей (рис. 12).
 Рис. 12.
Рис. 12.
Из приведенных треугольников можно записать уравнения, которые широко используются при анализе электрических цепей.
| (32) |
Из треугольника мощностей:

| (33) |
где S – полная мощность; Р – активная мощность; Q – реактивная мощность;
| S=UI. | (34) |
Размерность полной мощности – вольт-ампер (ВА); размерность активной мощности – ватт (Вт); размерность реактивной мощности – вольт-ампер реактивный (ВАр).
Величина cos φ называется коэффициентом мощности цепи.

| (35) |

| (36) |
Полное сопротивление может быть представлено комплексным числом в алгебраической и показательной форме. Комплекс полного сопротивления в алгебраической форме

| (37) |
где j – мнимая единица (j 2 = − 1).
Комплекс полного сопротивления в показательной форме
| (38) |
Где

|
Резонанс напряжений
В замкнутом контуре электрической цепи (см. рис. 9), содержащей активное сопротивление R, индуктивность L и емкость С, при условии равенства реактивных сопротивлений
| XL = XC | (39) |
возникает резонанс напряжений.
Выразим XL и XC через частоту ω и подставим в равенство (39)

| (40) |
Откуда
 , ,
| (41) |
где ωрез – частота питающего напряжения; ω 0 – частота собственных колебаний LC -контура.
Резонанс напряжений возникает в том случае, когда частота питающего напряжения равна частоте собственных колебаний LC -контура.
Следовательно, добиться резонанса напряжений можно изменением частоты ωрез или параметров контура L и C.
При резонансе напряжений

| (42) |
т.е. полное сопротивление цепи становится минимальным и равным только активному сопротивлению. Следовательно, ток при резонансе напряжений максимальный.
 Рис. 13.
Рис. 13.
При резонансе напряжений (рис. 13)
| UL=UC. | (43) |
Если при этом
| XL=XC>R, | (44) |
то напряжение на участке с индуктивным сопротивлением и равное ему напряжение на участке с емкостным сопротивлением будут больше питающего напряжения U.
Из векторной диаграммы (см. рис. 13) видно, что при резонансе напряжение U, приложенное к цепи, оказывается равным напряжению на активном сопротивлении (U=Uа) и совпадает по фазе с током I, т.е. угол сдвига фаз между I и U равен нулю (φ =0).
Выполнение работы.
Работа выполняется с использованием стенда, схема которого изображена на рис 14. Коммутация элементов производится с помощью тумблеров и перемычек. Возможна установка двух значений индуктивности L (одна или две последовательно включенные индуктивные катушки) и любого значения электроемкости С в интервале от 0 до 15,75 мкФ с шагом 0,25 мкФ. Это позволяет получить любой нужный режим в цепи.
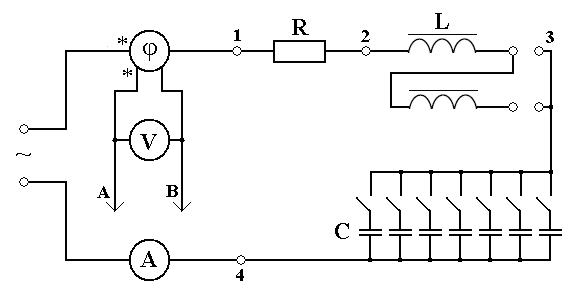
Рис. 14.
Параметры каждого элемента и цепи в целом измеряются на данном участке с помощью вольтметра, амперметра и фазометра. Щупы «А» и «В» подключаются к соответствующим клеммам (1, 2, 3, 4), причем щуп «А» должен подключаться к клемме с меньшим номером, чтобы фазометр давал верные показания.
Индуктивный режим последовательной цепи экспериментально определяется по φ > 0 для цепи в целом. Рекомендуется установить φ > 30°.
Емкостный режим характеризуется φ < 0. Рекомендуется при измерениях установить φ < -30°.
При резонансном режиме φ = 0.
Задание.
1. Установите индуктивный режим последовательной цепи, изменяя величины L и C. Измерьте I, U и φ для каждого элемента и цепи в целом. Результаты занесите в таблицу 1. По полученным данным рассчитайте Z, R, X, Ua, Up, S, P, Q. Постройте векторную диаграмму для силы тока I и напряжений U, UR, UL, UC в соответствии с результатами эксперимента.
2. Установите емкостный режим цепи и исследуйте ее аналогично п. 1, занеся данные в таблицу 2. Постройте векторную диаграмму.
3. Установите резонансный режим цепи и исследуйте ее аналогично п. 1, занеся данные в таблицу 3. Постройте векторную диаграмму.
Таблицы 1, 2, 3,
| Режим - … | ||||
| Участок Величины | Вся цепь (1 – 4) | R (1 – 2) | L (2 – 3) | C (3 – 4) |
| U, В | ||||
| I, A | ||||
| φ, гр | ||||
| Z, Ом | ||||
| R, Ом | ||||
| X, Ом | ||||
| U a, В | ||||
| U p, В | ||||
| S, ВА | ||||
| P, Вт | ||||
| Q, ВАр |

