




Лабораторная работа №8.
Исследование однофазного широтно-импульсного преобразователя для приводов постоянного тока.
1. Цель работы:
- Ознакомиться с принципом действия, схемой и работой широтно-импульсного преобразователя (ШИП), используемого в автоматизированном электроприводе;
- изучение параметров и характеристик транзисторного реверсивного ШИП.
ОСНОВНЫЕ СВЕДЕНИЯ.
В работе рассматривается импульсный метод управления частотой вращения. Данный метод регулирования широко используется в автоматизированных электроприводах для регулирования частоты вращения двигателя.
Широтно-импульсный преобразователь – устройство, предназначенное для регулирования частоты вращения двигателя не плавным изменением питающего напряжения, а подачей кратковременных импульсов на якорную обмотку двигателя.
Схема, поясняющая этот способ регулирования, приведена на рис. 1.

Рис. 1. Схема импульсного регулирования частоты вращения двигателя.
Цепь обмотки якоря двигателя независимого возбуждения периодически подключается к источнику напряжения ключом К. При замыкании цепи якоря на время t1 к обмотке якоря подводится напряжение U = Uном при этом ток нарастает до значения Imax (см. рис. 2).
При размыкании ключа ток уменьшается, достигая значения Imin, замыкаясь через диод VD. При следующем замыкании ключа К ток в якоре вновь достигает значения Imax и т.д. Таким образом, к цепи обмотки якоря подводятся импульсы напряжения, амплитудное значение которых равно напряжению U источника.

Рис. 2. Графики U = f(t), I = f(t) при импульсном регулировании частоты вращения двигателя.
Импульсное регулирование обеспечивает изменение частоты вращения лишь в сторону уменьшения от номинальной. Для снижения пульсации тока в цепи якоря включают дроссель L. Частота работы ключа составляет 200-400 Гц, т.к. на повышенных частотах легче добиться уменьшения пульсации выходного напряжения.
На рис. 3 показана схема импульсного регулирования напряжения, где в качестве ключа используют тиристор VS. Включается тиристор (что соответствует замыканию ключа) подачей кратковременного импульса от генератора импульсов ГИ на управляющий электрод. Цепь из дросселя L1 и конденсатора C, шунтирующая тиристор, служит для выключения последнего между двумя управляющими импульсами. При включении тиристора конденсатор C перезаряжается по контуру C VS L1 C и к тиристору прикладывается напряжение, обратное напряжению сети.

Рис. 3. Принципиальная схема при импульсном регулировании частоты
вращения двигателя с тиристорным ключом.
Среднее значение напряжения Uср подводимого к обмотке якоря, регулируется изменением частоты следования управляющих импульсов. Частота вращения двигателя с постоянными магнитами регулируется на обмотке якоря только в сторону уменьшения от номинального значения.
Для изменения направления вращения якоря (реверсирование) двигателя в данной схеме необходимо изменить направление тока в обмотке возбуждения. При одновременном изменении направления тока в обеих обмотках якоря двигатель не меняет направление вращения.
Тиристорные ШИП могут быть выполнены с одним, общим для всех силовых тиристоров коммутирующим устройством или с раздельными для тиристоров правого и левого вращения коммутирующими устройствами.
На рис. 4 приведена схема части тиристорного ШИП с последовательной коммутацией и одним коммутирующим устройством, питающимся от общего с силовыми тиристорами источника напряжения. Мостовая схема образована тиристорами VS1-VS4, причем в зависимости от необходимого направления вращения якоря двигателя, включенного в диагональ моста, управляющие импульсы подаются с помощью схемы управления либо на тиристоры VS1 и VS4, либо на тиристоры VS2 и VS3, осуществляя, таким образом, равномерную работу ключей.

Рис. 4. Принципиальная схема тиристорного ШИП.
Последовательное коммутирующее устройство, состоящее из вспомогательного тиристора VSк, конденсатора Cк и дросселя Lк, в моменты подачи на тиристор VSк импульсов гасит в зависимости от направления вращения либо тиристор VS2, либо тиристор VS4. Тиристоры VS1 и VS3 не запираются, обеспечивая замыкание цепи для тока якоря Iя во время паузы t = (T t1). На рис. 4 пунктиром показан ток Iя, замыкающийся под действием ЭДС якоря через VS1 и диод VD2 (при реверсе этот ток замыкается через тиристор VS3 и диод VD1). Зарядка коммутирующего конденсатора происходит через диод VDк и дроссель Lк от напряжения сети U.
Реверсивное управление двигателем при импульсном методе можно осуществить по мостовой схеме ШИП (рис.5), образованной четырьмя транзисторными ключами, к одной диагонали подведено напряжение питающей сети, а к другой присоединен якорь двигателя. Такая схема используется при относительной невысокой мощности двигателя до 300 Вт.
Диоды служат для замыкания цепи якоря через источник напряжения в те отрезки времени, когда ток якоря течет под действием ЭДС самоиндукции навстречу напряжению источника.
Ключи работают попарно, т.е. на интервале t1 замкнуты ключи VT1 и VT3 и на верхний зажим якоря подан плюс, а на интервале t2 замкнуты ключи VT2 и VT4 и на верхний зажим подан минус источника.
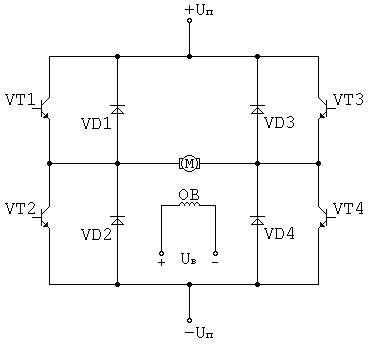
Рис. 5. Мостовая схема ШИП.
При широтно-импульсном управлении изменяют длительность замкнутого состояния ключа при неизменной длительности цикла (T = t1 + t2 = const), а, следовательно, и частоте переключений (частоте коммутаций) f1 = 1 / T = const.
Лабораторная установка (см. рис. 6) состоит из:
- блока ШИП;
- блока двухполярного питания;
- осциллографа [ОСЦ];
- цифровой вольтметр [V];
- двигателя постоянного тока ДПМ-30-Н1-02 [М].

Рис. 6. Структурная схема лабораторной установки.
Основные характеристики двигателя:
U = 29 В;
P2 ном = 6,47 В;
Nном = 9000 об/мин;
Мном = 6,86 мНм;
Мп = 34,3 мНм;
Iном = 0,75 А;
Iп = 5 А;
КПД = 30 %.
ШИП состоит из:
- генератора пилообразных импульсов G, реализованного на полевом транзисторе;
- трех операционных усилителей: DA2, DA3 – включенных по схеме компаратора, DA1 – по схеме инвертора;
- двух оконечных усилителей У1 и У2.
Генератор импульсов создает пилообразное напряжение. Компараторы DA2 и DA3 сравнивают его с опорным, и вырабатывают управляющие импульсы (на DA2 пилообразное напряжение попадает после инвертора DA1). У1 и У2 усиливают управляющие импульсы и в зависимости от их разности (разность потенциалов между KT6 и KT7) двигатель вращается в ту или другую сторону (зависит от знака разности) с частотой определяемой шириной импульса (зависит от уровня напряжения).
Работу установки поясняют временные диаграммы (рис. 7 – 9), где
Диаграмма 1 показывает форму пилообразного импульса в точке КТ2
(совмещена с диаграммой 2);
2 форму пилообразного импульса после инвертора в точке КТ1 (совмещена с диаграммой 1));
3 форму импульса после компаратора DA3;
4 форму импульса после компаратора DA2;
5 суммарный импульс, приходящий на электродвигатель М.
Для построения временных диаграмм необходимо руководствоваться следующим.
Для диаграммы 1: если опорное напряжение по абсолютной величине больше напряжения пилообразного импульса, то формируется положительный импульс; если меньше – отрицательный (диаграмма 3).
Для диаграммы 2: если опорное напряжение по абсолютной величине меньше напряжения пилообразного импульса, то формируется положительный импульс; если меньше – отрицательный (диаграмма 4).
Суммарный импульс на электродвигателе равен разности двух этих импульсов (диаграмма 3 минус диаграмма 4), т.е. диаграмма 5.
На рис. 7, 8, 9 представлены временные диаграммы получения управляющих импульсов на двигателе (диаграмма 5) для трех случаев:
а) опорное напряжение положительное Uоп > 0 (см. рис. 7);
б) опорное напряжение равно нулю Uоп = 0 (см. рис. 8);
в) опорное напряжение отрицательное Uоп <0 (см. рис. 9).


Рис. 7. Временные диаграммы при положительном опорном напряжении.
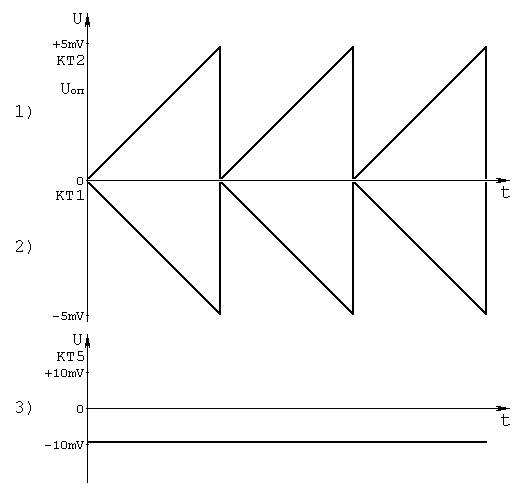
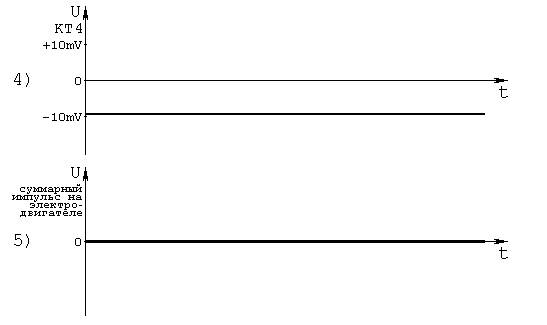
Рис. 8. Временные диаграммы при нулевом опорном напряжении.


Рис. 9. Временные диаграммы при отрицательном опорном напряжении.
Из диаграмм видно, что применяя транзисторный реверсивный ШИП, можно уровнем опорного напряжения управлять частотой вращения двигателя как в прямом, так и в обратном направлении.
При рассмотрении принципиальной схемы удобно пользоваться структурной схемой (рис. 6) для представления места и назначения того или иного элемента (функционального блока).
Генератор пилообразного напряжения (на структурной схеме G) вынесен на рис. 10. Принцип его действия основан на заряде конденсатора С1 (подъем импульса
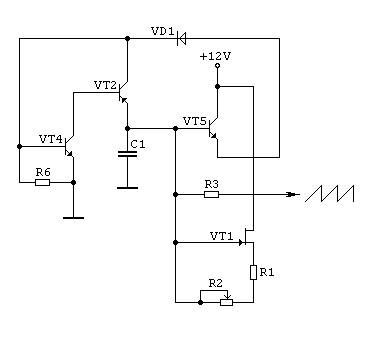
Рис. 10. Генератор пилообразных импульсов.
напряжения) и его разряде (спад). Как известно, равномерность нарастания импульса зависит от постоянства тока заряда. В данной схеме для этого используется генератор тока на полевом транзисторе VT1. При помощи переменного сопротивления R2 можно регулировать величину тока или, как следствие, длительность импульса. Заряд конденсатора будет продолжаться до тех пор, пока напряжение на обкладке конденсатора не откроет транзистор VT5. Далее ток через диод VD1 откроет транзистор VT4. Происходит разряд конденсатора через эмиттер – базу VT2 и коллектор – эмиттер VT4. Формирование следующего импульса происходит аналогично.
Усиление полученного пилообразного сигнала осуществляется посредством эмиттерного повторителя (рис. 11). Реостат R4 задает амплитуду.
В качестве инвертора используется интегральная микросхема (ИМС) К553УД2 (на рис. 6 DA1). Рис.12 показывает способ ее включения.
Задание опорного напряжения осуществляется с помощью делителя на R14 (на рис. 6 – реостат, подключенный к блоку питания) рис. 13.
Схема включения компараторов (на рис. 6 – DA2, DA3) на ИМС К553УД2 показана на рис. 14.
Для подавления высокочастотных шумов использована схема рис. 15
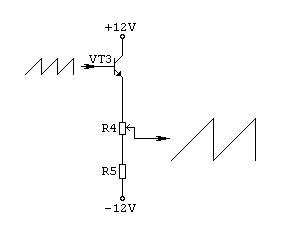
Рис. 11. Эмиттерный повторитель.

Рис. 12. Инвертор на ИМС К553УД2.

Рис. 13. Задатчик опорного напряжения.
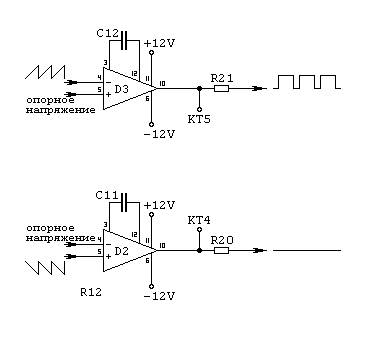
Рис. 14. Компараторы D2 и D3 на ИМС К553УД2.

Рис. 15. Схема подавления помех высокой частоты.
Силовая часть привода с ШИП реализована схемой показанной на рис. 16. Транзисторы VT6, VT10 и VT7, VT11 имеют p-n-p проводимость, т.е. они открываются низким уровнем напряжения на базе и закрываются высоким. При приложении к базам транзисторов VT8, VT12 и VT9, VT13 низкого уровня напряжения двигатель не вращается т.к. разность потенциалов точек КТ6 и КТ7 равна нулю. Когда на базу транзистора VT9 (и VT13) подается высокий, а на базу VT8 (и VT12) низкий уровень в цепи течет ток. Открытые транзисторы VT9, VT13 создают на базах VT7, VT11 низкий уровень и открывают их; в свою очередь закрытые VT8, VT12 удерживают в закрытом состоянии VT6, VT10. Ток проделывает следующий путь: +12V – эмиттерно-коллекторный переход VT7, VT11 – двигатель – коллекторно-эмиттерный переход VT9, VT13 -12V. Так работает одно плечо и двигатель вращается в одну сторону, при изменении потенциалов на входе схемы на противоположные работает другое плечо: VT6, VT10 – VT8, VT12 и двигатель вращается в другую сторону.

Рис. 16. Силовая часть привода с ШИП.
КОНТРОЛЬНЫЕ ВОПРОСЫ.
- Для чего устанавливается шунтирующий диод на двигатель и дроссель?
- Как работает мостовая схема ШИП?
- В чем суть широтно-импульсного регулирования?
- Чем отличается широтный метод регулирования от частотного?
- Какие требования предъявляются к задающему генератору ШИП?
- Что такое режим прерывистых токов?
- Механическая характеристика электродвигателя при широтно-импульсном методе управления.
- Как ведет себя двигатель, когда опорное напряжение Uоп = 0, Uоп < 0 и Uоп > 0?
- Объяснить, как получается отрицательный управляющий импульс при широтно-импульсном регулировании.
- Как работает генератор пилообразных импульсов?
- Принцип работы эмиттерного повторителя, инвертора, задатчика опорного напряжения, компаратора, схемы подавления помех.
- Объяснить работу силовой части привода.
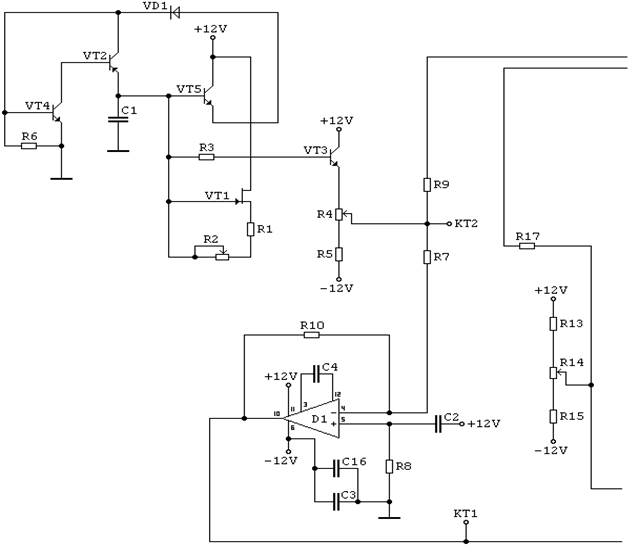
Принципиальная электрическая схема широтно-импульсного преобразователя привода постоянного тока.
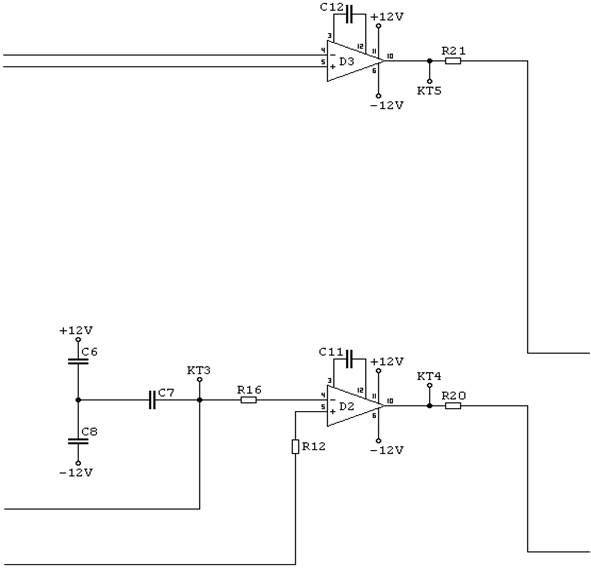
Принципиальная электрическая схема широтно-импульсного преобразователя привода постоянного тока.

Принципиальная электрическая схема широтно-импульсного преобразователя привода постоянного тока.

