Этот алгоритм реализуется при помощи регулятора с передаточной функцией
 (8)
(8)
Так как управляющее воздействие пропорционально как самому сигналу ошибки, так и его интегралу и производной
 (9)
(9)
то алгоритм получил название пропорционально-интегрально-дифференциального, а регулятор – ПИД-регулятора.
ПИД-алгоритм – наиболее гибкий алгоритм регулирования (в классе линейных алгоритмов). Он сочетает в себе преимущества более простых выше рассмотренных алгоритмов.
Коэффициенты kП, kИ, kД, входящие в передаточные функции типовых регуляторов, подлежат настройке при наладке АСУ и поэтому называются настроечными параметрами. Они имеют наименования: kП, kИ, kД - коэффициенты пропорциональной, интегральной и дифференциальной частей АСУ.
Оценка качества регулирования
Качество управления АСУ – совокупность свойств АСУ, характеризующих точность поддержания управляемой величины на заданном уровне в установившихся и переходных режимах.
Качество регулирования определяется видом переходного процесса, которых рекомендуется три типа. Выбор одного из них, как правило, удовлетворяет конкретным требованиям регулирования промышленного объекта. Типовые процессы регулирования приведены ниже:

Практическое задание
Дан график переходного процесса нагревательной печи:

Исходные данные объекта регулирования определяются из графика, который в данном случае задан, а в общем случае может быть определена экспериментально.
Показатели качества процесса выбираются:
x ст = 10 ºС статическая ошибка регулирования
x 1 = 20 ºС динамическая ошибка
tр =500с - время регулирования
Δxвх.об. =25% входа исполнительного механизма
Процесс – с 20% перерегулированием
1.Определить математическое описание объекта регулирования (одну из упрощенных моделей объекта) руководствуясь необходимостью простоты модели и качеством приближения переходной функции модели к переходной функции реального объекта.
2.Выбрать регулятор.
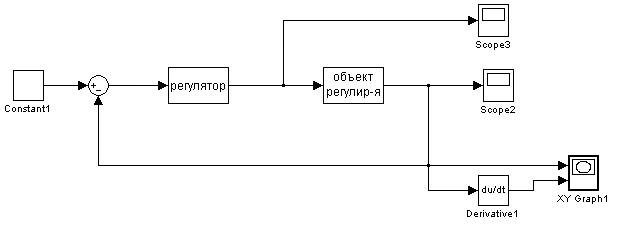
3.Составить схему АСУ, включив последовательно объект регулирования и регулятор. На вход подается постоянный сигнал, на выходах объекта регулирования и регулятора ставится блок Scope. 
4.Определить показатели качества полученной системы
5.Определить устойчивость полученной системы с помощью построения фазового портрета. Для этого добавить в схему XY Graph и Derivative
Для выбора регулятора производят следующие действия:
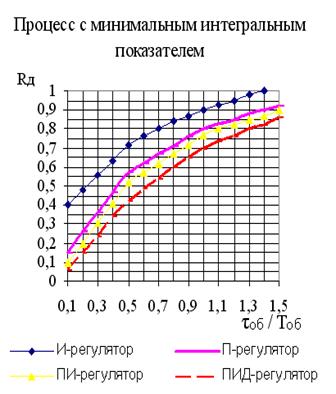
1) Рассчитать динамический коэффициент регулирования Rд
 (10)
(10)
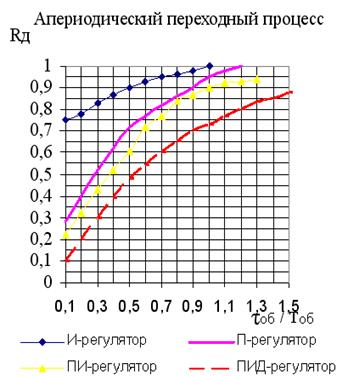
2) По графику «Динамические коэффициенты регулирования на статических объектах» определить тип регулятора, который подходит для данного объекта.(Приложение 1)
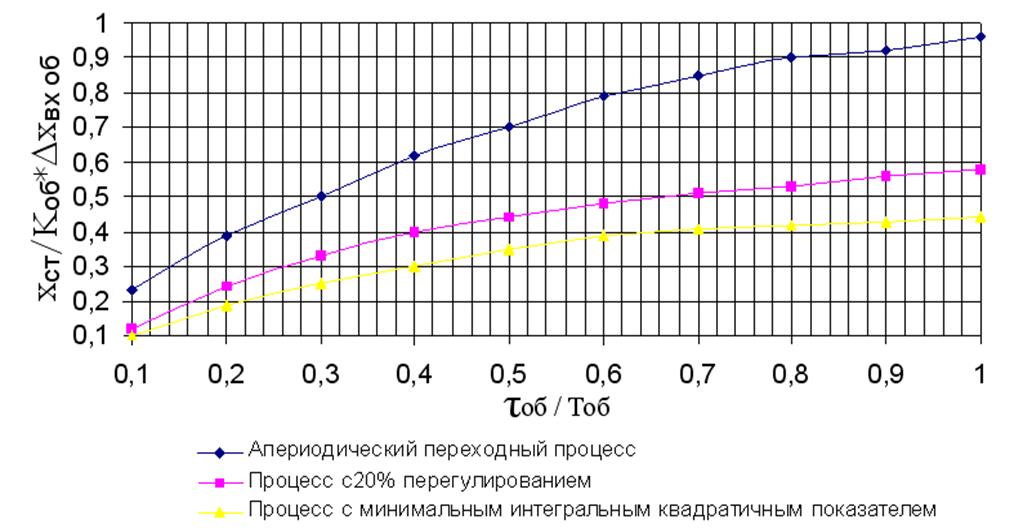
3) Проверяем П-регулятор на величину статической ошибки, которую он обеспечивает.
По графику «Остаточных отклонений, свойственных П-регуляторам на статических объектах» (Приложение 2)определяем комплекс
 (11)
(11)
находим xст и, сравнивая с заданным показателем качества процесса определяем подходит ли П-регулятор для данной схемы.
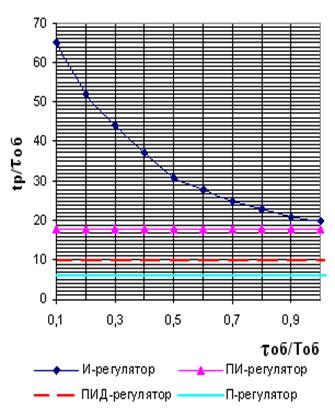
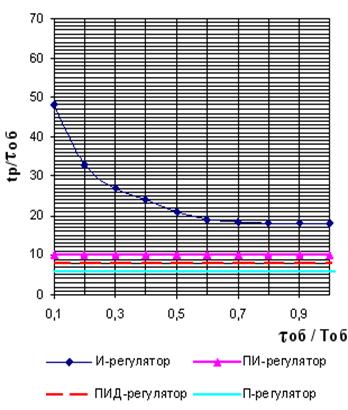
4) Если П-регулятор не удовлетворяет заданным показателям качества, рассматриваем ПИ-регулятор. По графику «Время регулирования на статических объектах» (Приложение 3)
определяем
 (12)
(12)
находим время регулирования tр сравнивая с заданным показателем качества процесса определяем подходит ли ПИ-регулятор для данной схемы.
5) Если ПИ-регулятор не удовлетворяет заданным показателям качества, используем П-И-Д-регулятор.
Выбираем ПД-регулятор, ибо все предыдущие не проходят по показателям качества.
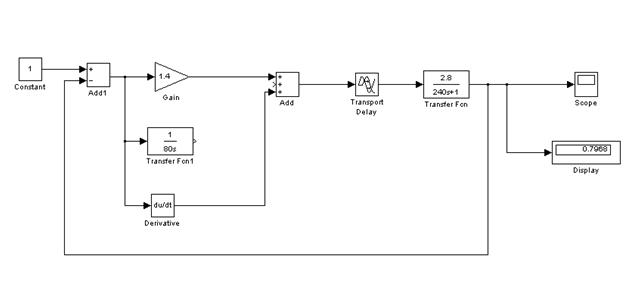
Рисунок 1 - Синтезированная САУ.
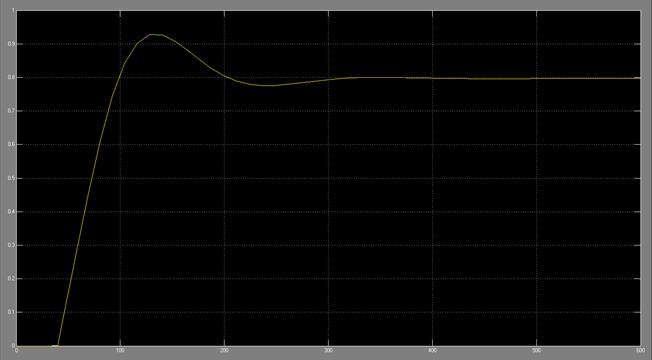
Рисунок 2 - Выход синтезированной системы.
Принимаем Кр=1.4.
Тогда показатели качества:
 .
.
 (удовлетворяет требованию).
(удовлетворяет требованию).
 . (удовлетворяет требованию).
. (удовлетворяет требованию).
 (удовлетворяет требованию.
(удовлетворяет требованию.
 (удовлетворяет требованию).
(удовлетворяет требованию).
6) Определяем настройки регулятора
6.1) Коэффициент регулирования Кр, время исполнения Ти определяется в соответствии с выбранным типом регулятора и настроечными параметрами по Таблице 1.
5. Контрольные вопросы
1.Что такое синтез АСУ? В чем заключается теоретический и технический синтез?
2.Какими параметрами характеризуется АСУ с объектами регулирования, имеющими s-образную переходную характеристику?
3.Какие упрощенные модели объектов регулирования существуют?
4.Какой связью соединяются звенья в объекте регулирования(последовательной, параллельной, обратной)?
5.Записать передаточную функцию идеального регулятора.
6. Какой связью соединяются звенья в регуляторе(последовательной, параллельной, встречнопараллельной)?
7.Построить идеальную алгоритмическую структуру.
8.Какими параметрами характеризуются типовые регуляторы?
6. Используемая литература
1. Власов К.П. Теория автоматического управления. Учебное пособие. Х.: Изд-во Гуманитарный центр, 2007. − 256 с. − ISBN 966-8324-33-1
2. Сенигов П.Н. Теория автоматического управления: Конспект лекций. – Челябинск: ЮурГУ 2001
Приложение №1

Приложение №2
«Остаточное отклонение, свойственное П-регуляторам на статических объектах»
Приложение №3
Апериодический процесс
Процесс с 20% перерегулированием

Процесс с минимальным интегральным показателем