




ВВЕДЕНИЕ
Курсовой проект по прикладной механике это первая самостоятельная комплексная расчетно-конструкторская работа студентов, завершающая их общетехническую подготовку.
Выполнение проекта закрепляет и углубляет знания, полученные при изучении общетехнических дисциплин: теоретической механики, высшей математики, инженерной графики. В большей мере, технической механики, включающей разделы сопротивления материалов, элементы теории машин и механизмов и основ конструирования деталей машин.
Курсовое проектирование направлено на развитие конструкторских навыков студентов, закрепление и расширение теоретических знаний, ознакомления с конструкциями типовых узлов и деталей, привитие самостоятельного решения инженерно технических задач по расчету и конструированию.
Работая над курсовым проектом, студенты знакомятся с этапом проектирования, действующими стандартами, нормами, справочной литературой, получают навыки не только технических расчётов с использованием вычислительной техники, но и оформление графической части проекта и составления пояснительной записки. Все это создает базу для грамотного, в инженерном смысле, выполнения курсовых проектов по специальным дисциплинам.
Кинематический анализ балансирного пресса.
Краткое описание конструкции и работы балансирного пресса.
Машинный агрегат состоит из трёх последовательных механизмов: электродвигателя, редуктора и механизма пресса.
Механизм пресса представляет собой последовательное соединение кривошипа с кривошипно-ползунным механизмом (КПМ). Плоскость движения ползуна расположена под углом в 90 о к горизонту. В механизме пресса только один ход поршня является рабочим. Это означает что в рабочем цилиндре, где расположен поршень, по одну сторону происходит поднимание, а по другую опускание.
Кривошипы пресса конструктивно оформлены в виде коленчатого вала. Поскольку число оборотов коленчатого вала неравно числу оборотов электродвигателя, то между электродвигателем и прессом находится редуктор, который представляет собой последовательное соединение трехзвенных зубчатых механизмов помещенных в отдельный корпус предназначенный для изменения параметров мощности.
Определение длин звеньев.
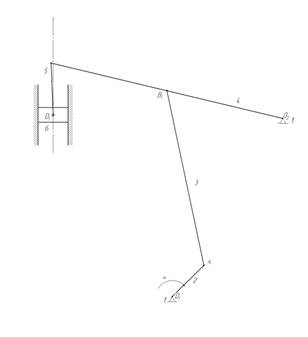
Кинематическая схема кривошипно-ползунного механизма:
1 - стойка;
2 - кривошип ОА;
3 - шатун АВ;
4 - кривошип ОC;
5 - шатун ВС;
6 - ползун;
Основные размеры:
lОA – 0,3 (длина кривошипа);
lАB – 1,2 (длина шатуна АВ);
lОС – 1,6 (длина кривошипа ОC);
lОВ – 0,8 (длина шатуна ОВ);
lСD – 0,35 (длина шатуна CD);
Определим масштаб ml механизма:
ml=lист/lчерт=0,3м/45мм=0,00067 м/мм;
Исходя из масштаба ml=0,00067 м/мм, определяем длины всех звеньев механизма:
ОА=45мм; АВ=180мм; ОС=240мм; ОВ=120мм; CD=52,5мм.
Определение положений и построение планов механизмов
Для построения планов механизма выберем масштабный коэффициент ml и вычисляем отрезки чертежа:
Радиусом, равным ОА, проводим окружность, а так как кривошип ОА имеет равномерное вращательное движение и совершает полный оборот, то делим окружность на двенадцать равных частей через каждые тридцать градусов. Каждое положение точки А обозначаем определённым номером. Для определения крайних положений (КПМ) производим следующие действия: обозначаем положения, в которых кривошип ОА и шатун АВ складываются и вытягиваются в одну линию.
Построение планов механизма начинаем с положения точки А в первой позиции. Положение точки А однозначно известно. Из точки А откладываем длину шатуна АВ. Полученную точку В соединим прямой линией с точкой А и определим тем самым положение шатуна в первом положении. Далее определяем положение стойки О. Из точки О откладываем отрезок, равный длине кривошипа ОВ, далее откладываем от точки В расстояние ВС и из полученной точки откладываем величину кривошипа СD, до пересечения с прямой определяющей прямую по которой движется ползун, в полученной точке D этим самым определяем положение конечного звена (точка D) и в этой точке изображаем ползун в виде прямоугольника. Аналогично проводим действия и для других одиннадцати положений (КПМ).
Структурный анализ механизма
Определение структурного анализа механизма необходимо для выбора метода кинематического и силового анализа.
Кривошипно-ползунный 6-звенный механизм.
Степень подвижности механизма вычисляется по формуле Чебышева:
W=3*n-2*p5-p4
где n – число подвижных звеньев механизма, n=5;
p5 – число кинематических пар пятого класса, p5=7;
p4 – число кинематических пар четвёртого класса, p4=0.
W=3.5-2.7 –0=1
Ведущим является звено ОА. Ведомая часть механизма состоит из 3 групп Ассура.
Формула структурного анализа механизма пресса.
2кл.2пр.(3-4)
1кл.1пр.(1-2)
2кл.2пр.(5-6)
Весь механизм: 2 класс.