




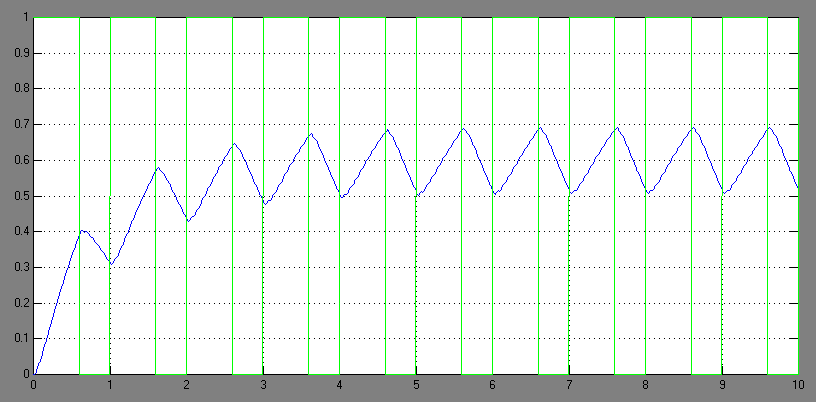
10.1. Получение графического изображения реакции исследуемой системы на трапецеидальное входное воздействие.
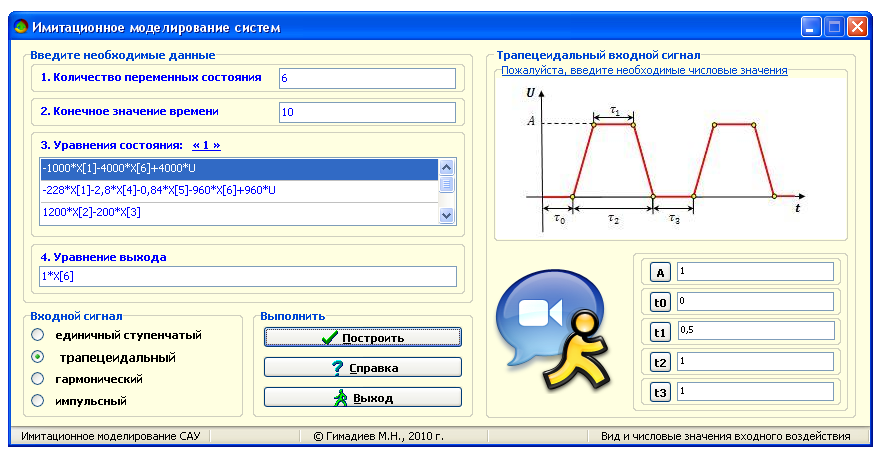

Рис. 13. Реакция САУ на трапецеидальное входное воздействие
10.2. Получение графического изображения реакции исследуемой системы на импульсное входное воздействие.


Рис. 14. Реакция САУ на импульсное входное воздействие
Проверка в среде Simulink.

Проверка показала правильное функционирование программы, так как графическое изображения реакции САУ на импульсное входное воздействие, полученное при помощи составленной программы и среды Simulink, полностью совпадают.
10.3. Получение графического изображения реакции исследуемой системы на гармоническое входное воздействие.


Рис. 15. Реакция САУ на гармоническое входное воздействие
Проверка в среде Simulink.


Проверка показала правильное функционирование программы, так как графическое изображения реакции САУ на гармоническое входное воздействие, полученное при помощи составленной программы и среды Simulink, полностью совпадают.
Получение графического изображения реакции САУ при последовательностях единичного ступенчатого, импульсного и гармонического сигналов.
Для выполнения данного пункта расчетно-графической работы воспользуемся интегрированной в MatLab средой Simulink.

Рис. 14. Определение реакции САУ на последовательность входных сигналов в Simulink.

Изменим числовые параметры входных сигналов и определим реакцию САУ.

Анализ-заключение по результатам работы.
В данной расчетно-графической работе исследовался электромеханический привод промышленного манипулятора.
При выполнении работы были применены знания в области теории автоматического управления и высшей математики для математического описания и исследования САУ. Так же был освоен метод моделирования для исследования динамики электромеханического привода промышленного манипулятора.
Согласно заданию на расчетно-графическую работу были решены следующие задачи:
1) разработка фазовой математической модели линейной САУ методами пространства состояний;
2) исследование модели на устойчивость, управляемость и наблюдаемость;
3) разработка цифровой модели САУ по заданной структурной схеме и передаточным функциям звеньев;
4) получение графического изображения реакции САУ на различные входные сигналы;
5) определение основных параметров качества функционирования системы.
В результате выполнения расчетно-графической работы были определены:
1) модель в пространстве состояний исследуемой САУ;
2) фробениусова каноническая форма уравнений состояний и граф системы по фробениусовой канонической форме;
3) жорданова каноническая форма уравнений состояний и граф системы по жордановой канонической форме.
Используя данные канонические формы и графы системы, было выявлено, что система является устойчивой, частично управляемой и полностью наблюдаемой.
Пользуясь моделью в пространстве состояний исследуемой САУ, мной была разработана программа для имитационного моделирования системы. В ней применяется метод численного интегрирования Рунге-Кутта II порядка. Сравнение результатов функционирования составленной программы и интегрированной в систему MatLab среды Simulink, позволяет сделать вывод, что составленная программа работает правильно.
Таким образом, в результате выполнения данной расчетно-графической работы мной были получены и углублены знания по получению моделей системы в пространстве состояний; по определению устойчивости, управляемости и наблюдаемости системы; по применению метода моделирования для исследования САУ.
Список используемой литературы
1. Асанов А.З. Метод пространства состояний в задачах анализа динамических систем.–Набережные Челны: Изд-во КамПИ, 1992.
2. Асанов А.З. Цифровое моделирование и анализ динамических систем.– Набережные Челны: Изд-во КамПИ, 2004.
3. Ахмадеев. И.А. Использование системы MatLAB для исследования систем управления.–Набережные челны: Изд-во КамПИ, 2002.
4. Лазарев Ю. Начала программирования в среде MatLAB: Учебное пособие.– Киев: Изд-во
НТУУ "КПИ", 2003.
5. Вальвачев А.Н. Программирование на языке Delphi.– Минск: Изд-во ООО «Попурри», 1997.
6. Макаров Е.Г. Самоучитель MathCad 14.– М.: Изд-во «Новый Диск», 2008.
Приложение. Листинг программы.
Unit Unit1;
Interface
Uses
Windows, Messages, SysUtils, Variants, Classes, Graphics, Controls, Forms, Dialogs, StdCtrls, ComCtrls, Buttons, ExtCtrls, jpeg, pngimage, Grids,CategoryButtons;
Type
TMass= array of array of Real;
TVector= array of Real;
TVec= array of array of Integer;
Type
TForm1 = class(TForm)
procedure BitBtn4Click(Sender: TObject);
procedure BitBtn1Click(Sender: TObject);
procedure BitBtn3Click(Sender: TObject);
procedure RadioGroup1Click(Sender: TObject);
procedure Timer2Timer(Sender: TObject);
procedure FormCreate(Sender: TObject);
procedure StringGrid1SelectCell(Sender: TObject; ACol, ARow: Integer; var CanSelect: Boolean);
procedure Edit12Change(Sender: TObject);
Private
procedure RK22 (A:TMass; n: integer; var t,U1: Extended; h: real; var X: TVector);
function RP(n: integer; A: TMass; X: TVector; t: real; U1:Extended): Real;
function Read(Str: string; i,j: integer): Real;
function ReadPS(Str: string; j,n: integer): Integer;
function Signal(i: byte;t: Extended): Real;
function Trapеzion(t: Extended): Real;
function Harmonic(t: Extended): Real;
function Impulse(t: Extended): Real;
function ReadSignal(t: Extended): Extended;
End;
Var
Form1: TForm1;
C,A: TMass;
F,Z: TVector;
P: TVec;
t: Extended;
i,j,k: integer;
implementation
uses Unit2, Unit3;
{$R *.dfm}
procedure TForm1.BitBtn1Click(Sender: TObject);
Var
tk: real;
n: integer;
X: TVector;
U: Extended;
U1: Extended;
Const
h = 0.001;
Begin
Form2.Series1.Clear;
Form2.Series2.Clear;
Form1.Left:= (Screen.Width - Form1.Width) div 2;
Form1.Top:= Screen.Height - Form1.Height - 50;
Form2.Left:= (Screen.Width - Form2.Width) div 2;
Form2.Top:= Form1.Top - 250;
Form2.Show;
t:= 0; // начальное время
tk:= StrToFloat(Edit13.Text); // конечное время
n:= StrToInt(Edit12.Text); // кол-во уравнений состояния
SetLength(X,n);
for i:= 0 to (n-1) do
begin
X[i]:=0;
end;
i:=0;
for j:= 0 to n do
begin
SetLength(P,i+1,j+1);
SetLength(C,i+1,j+1);
P[i,j]:= ReadPS(Edit6.Text,j,n);
C[i,j]:= Read(Edit6.Text,i,j);
end;
P:= nil;
SetLength(P,n,(n+1));
SetLength(A,n,(n+1));
for i:= 0 to (n-1) do
for j:= 0 to n do
begin
P[i,j]:= ReadPS(StringGrid2.Rows[i].Text,j,n);
A[i,j]:= Read(StringGrid2.Rows[i].Text,i,j);
end;
while (t<tk) do
begin
U1:= ReadSignal(t);
RK22(A,n,t,U1,h,X);
U:=0;
for j:= 0 to n do
begin
if (j<n) then
U:= U + C[0,j]*X[j]
else
U:= U + C[0,j]*U1;
end;
Form2.Series1.AddXY(t,U);
t:=t+h;
end;
Form2.Chart1.Title.Caption:= 'Реакция САУ на';
case RadioGroup1.ItemIndex of
0:Form2.Chart1.Title.Caption:= Form2.Chart1.Title.Caption + ' единичное ступенчатое воздействие';
1:Form2.Chart1.Title.Caption:= Form2.Chart1.Title.Caption + ' трапецеидальное воздействие';
2:Form2.Chart1.Title.Caption:= Form2.Chart1.Title.Caption + ' гармоническое воздействие';
3:Form2.Chart1.Title.Caption:= Form2.Chart1.Title.Caption + ' импульсное воздействие';
end;
end;
procedure TForm1.BitBtn3Click(Sender: TObject);
begin
Form3:= TForm3.Create(Self);
try
begin
Form3.Image1.Picture.LoadFromFile('info.png');
Form3.ShowModal;
end;
finally
Form3.Free;
end;
end;
procedure TForm1.RadioGroup1Click(Sender: TObject);
Begin
Form2.Close;
case RadioGroup1.ItemIndex of
0: i:=0;
1: i:=1;
2: i:=2;
3: i:=3;
end;
TRadioButton(RadioGroup1.Controls[i]).Font.Size:= 9;
Timer2.Enabled:= True;
Image2.Picture.LoadFromFile('iChat.png');
Edit7.Text:='';
Edit8.Text:='';
Edit9.Text:='';
Edit10.Text:='';
Edit11.Text:='';
End;
function TForm1.Read(Str: string; i,j: integer): Real;
Var
k1,k2: integer;
Begin
if P[i,j]=0 then
begin
Result:=0;
end
else
begin
if (j=0) then
k1:= 1
else
k1:= P[i,j-1] + 5;
k2:= P[i,j] - k1;
Result:= StrToFloat(copy(Str,k1,k2));
end;
End;
function TForm1.ReadPS(Str: string; j, n: integer): integer;
Var
S, Z: string;
Begin
Z:= '*X[';
Inc(j);
if (j<=n) then
begin
S:= Z + IntToStr(j) + ']';
result:= Pos(S,Str);
end
else
result:= Pos('*U',Str);
End;
function TForm1.ReadSignal(t: Extended): Extended;
Begin
case RadioGroup1.ItemIndex of
0: result:=Signal(0,t);
1: begin
if (Edit7.Text='') or (Edit8.Text='') or (Edit9.Text='') or(Edit10.Text='') or (Edit11.Text='') then
begin
Mes;
exit;
end;
result:=Signal(1,t);
end;
2: begin
if (Edit7.Text='') or (Edit9.Text='') or (Edit11.Text='') then
begin
Mes;
exit;
end;
result:=Signal(2,t);
end;
3: begin
if (Edit7.Text='') or (Edit9.Text='') or(Edit10.Text='') or (Edit11.Text='') then
begin
Mes;
exit;
end;
result:=Signal(3,t);
end;
end;
End;
procedure TForm1.RK22(A: TMass; n: integer; var t,U1: Extended; h: real; var X: TVector);
Var
h2: real;
X1: TVector;
begin
h2:=h/2;
SetLength(X1,n);
SetLength(F,n);
for i:= 0 to (n-1) do
begin
F[i]:= RP(n,A,X,t,U1);
X1[i]:= X[i]+h2*F[i];
end;
for i:= 0 to (n-1) do
begin
F[i]:= RP(n,A,X1,t,U1);
X[i]:=X[i]+h*F[i];
end;
End;
function TForm1.RP(n: integer; A: TMass; X: TVector; t: real;U1: Extended): Real;
Begin
result:= 0;
for j:= 0 to n do
begin
if j=0 then
result:= A[i,j]*X[j]
else
if (j<n) then
result:= result + A[i,j]*X[j]
else
result:= result + A[i,j]*U1;
end;
End;
function TForm1.Signal(i: byte; t: Extended): Real;
Begin
case i of
0: begin
result:=1;
Form2.Series2.AddXY(t,result);
end;
1: result:= Trapеzion(t);
2: result:= Harmonic(t);
3: result:= Impulse(t);
End;
End;
procedure TForm1.Timer2Timer(Sender: TObject);
Const
L = 474;
Begin
if RadioGroup1.ItemIndex=0 then
begin
Form1.Width:= L;
Form1.Left:= (Screen.Width - Form1.Width) div 2;
Timer2.Enabled:= False;
exit;
end;
FormPlus;
while (Form1.ClientWidth < 859) do
begin
Form1.ClientWidth:= Form1.ClientWidth + 1;
Form1.Left:= (Screen.Width - Form1.Width) div 2;
end;
GroupBox8.Caption:= '';
GroupBox8.Visible:= True;
GroupBox9.Visible:= True;
SpeedButton1.Caption:= 'A';
if RadioGroup1.ItemIndex=1 then
begin
GroupBox8.Caption:= ' Трапецеидальный входной сигнал';
GroupBox10.Visible:= True;
GroupBox11.Visible:= True;
GroupBox12.Visible:= True;
GroupBox13.Visible:= True;
GroupBox14.Visible:= True;
Edit7.Visible:= True;
Edit8.Visible:= True;
Edit9.Visible:= True;
Edit10.Visible:= True;
Edit11.Visible:= True;
SpeedButton2.Caption:= 't0';
SpeedButton3.Caption:= 't1';
SpeedButton4.Caption:= 't2';
SpeedButton5.Caption:= 't3';
Image1.Picture.LoadFromFile('Trapеzion.png');
End;
if RadioGroup1.ItemIndex=2 then
Begin
GroupBox8.Caption:= ' Гармонический входной сигнал';
GroupBox10.Visible:= True;
GroupBox12.Visible:= True;
GroupBox14.Visible:= True;
Edit7.Visible:= True;
Edit9.Visible:= True;
Edit11.Visible:= True;
SpeedButton3.Caption:= 'w';
SpeedButton5.Caption:= 'f0';
Image1.Picture.LoadFromFile('Harmonic.png');
End;
if RadioGroup1.ItemIndex=3 then
begin
GroupBox8.Caption:= ' Импульсный входной сигнал';
GroupBox10.Visible:= True;
GroupBox12.Visible:= True;
GroupBox13.Visible:= True;
GroupBox14.Visible:= True;
Edit7.Visible:= True;
Edit9.Visible:= True;
Edit10.Visible:= True;
Edit11.Visible:= True;
SpeedButton3.Caption:= 't1';
SpeedButton4.Caption:= 't2';
SpeedButton5.Caption:= 't3';
Image1.Picture.LoadFromFile('Impulse.png');
end;
if (Form1.ClientWidth = 859) then
StatusBar1.Panels[4].Text:=' Вид и числовые значения входного воздействия';
Timer2.Enabled:= False;
End;
function TForm1.Trapеzion(t: Extended): Real;
Var
x0,x1,x2,x3,x4, l, a: Real;
Begin
SetLength(Z,5);
Z[0]:= StrToFloat(Edit7.Text); // A
Z[1]:= StrToFloat(Edit9.Text); // t1
Z[2]:= StrToFloat(Edit10.Text); // t2
Z[3]:= StrToFloat(Edit11.Text); // t3
Z[4]:= StrToFloat(Edit8.Text); // t0
l:= Z[2]+Z[3];
if t<Z[4] then
begin
result:=0;
Form2.Series2.AddXY(t,result);
exit;
end
else
begin
t:= t - Z[4];
if t>l then
begin
i:= Trunc(t/l);
a:= i*l;
end
else
a:=0;
end;
x0:= a;
x1:= (Z[2] - Z[1])/2 + a;
x2:= 0.5*Z[1] + 0.5*Z[2] + a;
x3:= Z[2] + a;
x4:= Z[2] + Z[3] + a;
if (t>=x0) and (t<x1) then
result:= Z[0]*((t-x0)/(x1-x0));
if (t>=x1) and (t<x2) then
result:= Z[0];
if (t>=x2) and (t<=x3) then
result:= Z[0]*(1-((t-x2)/(x3-x2)));
if (t>x3) and (t<x4) then
result:= 0;
t:= t + Z[4];
Form2.Series2.AddXY(t,result);
End;
function TForm1.Harmonic(t: Extended): Real;
var
A, w, f: Real;
begin
A:= StrToFloat(Edit7.Text);
w:= StrToFloat(Edit9.Text);
f:= StrToFloat(Edit11.Text);
result:= A*sin(w*t+f);
Form2.Series2.AddXY(t,result);
End;
function TForm1.Impulse(t: Extended): Real;
Var
x1,x2,x3, l, a: Real;
Begin
SetLength(Z,4);
Z[0]:= StrToFloat(Edit7.Text); // A
Z[1]:= StrToFloat(Edit9.Text); // t1
Z[2]:= StrToFloat(Edit10.Text); // t2
Z[3]:= StrToFloat(Edit11.Text); // t3
l:= Z[2]+Z[3];
if t<Z[1] then
begin
result:=0;
Form2.Series2.AddXY(t,result);
exit;
end;
t:=t-Z[1];
if t>l then
begin
i:= Trunc(t/l);
a:= i*l;
end
else
a:=0;
x1:= a;
x2:= Z[2] + a;
x3:= Z[2] + Z[3]+ a;
if (t>=x1) and (t<x2) then result:= Z[0];
if (t>=x2) and (t<x3) then result:= 0;
t:= t + Z[1];
Form2.Series2.AddXY(t,result);
End;
End.

