




Тема 3 Спутниковые методы измерений в инженерно-геодезических работах
Глобальные системы определения местоположения НАВСТАР и ГЛОНАСС
При производстве инженерно-геодезических широко применяется спутниковый метод определения координат. Применение данного метода позволило существенно сократить время на проведение полевых работ и повысить точность получаемых результатов.
В настоящее время на территории России функционируют две спутниковые системы определения координат: российская система ГЛОНАСС (ГЛОбальная НАвигационная Спутниковая Система) и американская система NAVSTAR GPS (навигационная система определения расстояний и времени, глобальная система позиционирования). Под словом «позиционирование» подразумевается определение координат. Обе системы создавались для решения военных задач, но в последние годы нашли широкое применение в геодезии для определения местоположения координат пунктов геодезических сетей, граничных точек земельных участков (межевых знаков) и других объектов местности.
Использование при определении местоположения глобальных навигационных спутниковых систем (ГНСС) имеет существенные преимущества по сравнению с традиционными геодезическими методами:
исключается необходимость располагать определяемые пункты геодезических сетей при условии взаимной видимости между ними;
расстояния между определяемыми пунктами могут составлять десятки километров;
возможны наблюдения в любую погоду как в дневное, так и в ночное время;
измерения и обработка результатов практически полностью автоматизированы;
возможно получение координат геодезических пунктов, поворотных точек границ земельных участков, съемочных станций, характерных точек объектов недвижимости в реальном масштабе времени и др.
Глобальная система NAVSTAR GPS основана на созвездии спутников, обращающихся вокруг земли на средневысоких орбитах. Принцип работы системы состоит в том, что приемники GPS – сигналов на земле используют эти спутники в качестве исходных опорных пунктов для определения своего местоположения. Это интерпретации известной в геодезии обратной линейной засечки, когда на пересечении прямых определяют координаты искомого пункта, измеряя время прохождения сигналов от спутников до приемника, вычисляющего расстояния до спутников.
Измерив расстояния до четырех спутников приемник вычисляет свою широту, долготу и высоту.
Глобальная навигационная спутниковая система (ГНСС) состоит из трех основных сегментов: контроля и управления, космический и потребителя (пользователя).
Сегмент контроля и управления состоит из следующих взаимосвязанных стационарных элементов:
- центр управления системой (ЦУС);
- контрольные станции (КС);
- командная станция слежения (КСС);
- квантово- оптические станции (КОС) и другие станции слежения за работой бортовых устройств спутников.
Одна из составляющих этого сегмента - равномерно расположенная на поверхности Земли космическая геодезическая сеть.
Космический сегмент представляет собой созвездие из навигационных искусственных спутников Земли (НИСЗ), вращающихся вокруг Земли на определенных орбитах.
В ГНСС GPS навигационные искусственные спутники Земли размещены на шести орбитальных плоскостях по четыре НИСЗ в каждой. Высота орбит 20145 км (рис. 3.1). Восходящие узлы орбит в ГНСС GPS расположены равномерно по экватору и отстоят друг от друга по долготе на 60° на восток.
В глобальной навигационной спутниковой системе ГЛОНАСС на трех орбитальных плоскостях должны вращаться равномерно расположенные на каждой орбите 24 искусственных спутника Земли (рис.3.2). Тип орбиты — круговой. Высота орбиты 19100 км, наклонение орбиты 64,8°. Период обращения — примерно 12 ч.
При невозмущенном движении НИСЗ параметры орбиты в каждый фиксированный момент времени постоянны и не меняются при движении спутника по орбите. Пространственное положение НИСЗ характеризуют его «бортовые эфемериды», включающие в себя пространственные прямоугольные координаты НИСЗ (в системе координат WGS-84 для GPS и в системе ПЗ-90 для ГЛОНАСС) на определенный момент времени tк (на определенную эпоху).
Бортовые эфемериды вычисляют и прогнозируют в результате обработки измерений, выполняемых сегментом контроля и управления. По результатам соответствующих измерений бортовые эфемериды загружаются на НИСЗ несколько раз в сутки. При этом влияние погрешностей эфемерид (неточность определения параметров орбит, непрогнозируемые смещения НИСЗ и др.) на точность абсолютного положения определяемых пунктов не превышает для системы ГЛОНАСС - 9,2 м, системы ОРЗ -1м.

Рис. 3.1 Созвездие НИСЗ системы GPS

Рис. 3.2 Созвездие НИСЗ системы ГЛОНАСС

Рис. 3.3 Навигационный спутник ГЛОНАСС
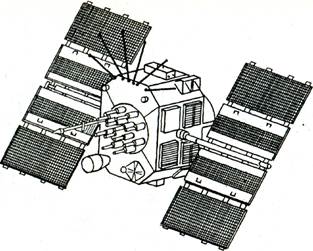
Рис. 3.4 Навигационный спутник NAVSTAR GPS
Период обращения спутников вокруг земли равен 12 часам звездного времени. Спутники оснащены солнечными батареями, которые обеспечивают энергией все системы, в том числе и во время прохождения спутника в тени Земли.
На каждом спутнике имеется передатчик, генерирующий колебания несущих частот с названием L-диапазон. В системе NAVSTAR GPS все спутники (рис.3.4) излучают на двух одинаковых частотах L-диапазона:
L1 = 1575,42МГц (длина волны 19,05 см)
L2 = 1227,60 МГц (длина волны 24,45 см).
Однако каждый спутник излучает свой личный код (индивидуальная последовательность переключения фазы на 180º), по которому ведется распознавание спутников.
В российской системе ГЛОНАСС спутник (рис.3.3) излучает на своей частоте, а код общий для всех спутников. Российские спутники передают информацию на двух частотах L1 и L2:
 ;
; 
 ,
,
где κ=0, 1, 2, 3…- номер спутника;  =1602 МГц;
=1602 МГц;  =1246 МГц;
=1246 МГц;  = 0,4375 МГц;
= 0,4375 МГц;  =0,5625 МГц.
=0,5625 МГц.
Отношение частот 9/7.
Сегмент потребителей. К данному сегменту относится приемная аппаратура, осуществляющая прием и первичную обработку сигналов ИСЗ.
Обработка сигналов выполняют с целью получения необходимой потребителям информации (пространственно-временных координат, направления и скорости, пространственной ориентации и т.д.). Упрощенная структурная схема приемной аппаратуры (приемника спутниковых сигналов) представлена на рисунке 3.5.

Рис.3.5 Структурная схеме приемника спутниковых сигналов
Приемное устройство выполняет функции супергетеродинного приемника, а также первичную обработку сигналов. Соответствующие сигналы поступают в блок поиска и измерения. После завершения поиска происходит захват сигнала, который поступает в вычислительный блок. По указаниям оператора (наблюдателя) результаты соответствующей обработки могут быть отражены на дисплее.

