




Цель: Получить навыки расчета параметров асинхронных, синхронных машин и машин постоянного тока.
В результате выполнения практического занятия у студента формируется компетенция ПК-22 (умение проводить оценку технического состояния и остаточного ресурса строительного оборудования).
Актуальность темы практического занятия заключается в необходимости знать параметры вращающихся электрических машин, используемых в промышленности и при строительстве.
Теоретическая часть
Асинхронные машины – наиболее распространенные электрические машины. В основном их используют в качестве электрических двигателей. Благодаря простоте устройства и высокой надежности их широко применяют для привода станков, грузоподъемных и землеройных машин, компрессоров, вентиляторов, и т.д.
Асинхронная машина (рисунок 8.1) состоит из подвижной части – ротора (3), и неподвижной – статора (1). Токи обмотки статора двухполюсной машины создают двухполюсный магнитный поток, проходящий через статор (1), ротор (3) и зазор между ними.
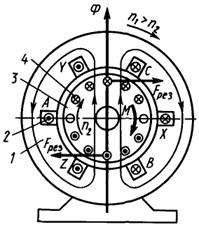
Рисунок 8.1 – Электромагнитная схема асинхронной машины
Обмотка статора (2) создает магнитное поле, вращающееся с частотой (синхронной)
 , об/сек; (8.1)
, об/сек; (8.1)
где f 1 – частота тока статора, p – число пар полюсов.
Магнитное поле вращается в направлении чередования фаз А, В, С обмотки статора.
Магнитный поток Ф1, создаваемый обмоткой статора (рисунок 8.1), при своем вращении пересекает проводники обмотки ротора (4), индуктирует в них ЭДС, и если обмотка ротора замкнута, то в ней возникают токи i 2, частота которых f 2 при неподвижном роторе(п = 0) равна первичной частоте f 1.
Если обмотка ротора является трехфазной, то в ней индуктируется трехфазный ток. Этот ток создает вращающийся поток ротора Ф2, число полюсов 2 р, направление и скорость вращения которого при n = 0
 (8.2)
(8.2)
такие же, как и у потока статора. Поэтому потоки Ф1 и Ф2 вращаются синхронно и образуют общий вращающийся поток двигателя Ф.
В результате взаимодействия токов ротора с потоком возникают действующие на проводники ротора механические силы F и вращающий электромагнитный момент М.
Если развиваемый момент больше статического тормозного момента на валу, то ротор двигателя придет во вращение в направлении вращения поля с некоторой скоростью  , т. е. будет вращаться с некоторым отставанием или скольжением, относительно поля статора. Такой режим называют двигательным.
, т. е. будет вращаться с некоторым отставанием или скольжением, относительно поля статора. Такой режим называют двигательным.
Относительная разность скоростей вращения поля статора и ротора называется скольжением.
 . (8.3)
. (8.3)
Скорость ротора, выраженная через скольжение s, равна
 (8.4)
(8.4)
При пуске двигателя (n = 0) согласно (6.3) s = 1, а при вращении ротора синхронно с полем статора или, как говорят, с синхронной скоростью ( ) s = 0. При магнитное поле статора относительно ротора неподвижно и токи в роторе индуктироваться не будут, поэтому М = 0 и такой скорости вращения двигатель достичь не может. Вследствие этого в режиме двигателя всегда
) s = 0. При магнитное поле статора относительно ротора неподвижно и токи в роторе индуктироваться не будут, поэтому М = 0 и такой скорости вращения двигатель достичь не может. Вследствие этого в режиме двигателя всегда  и
и  .
.
При вращении ротора в сторону поля частота пересечения полем проводников ротора пропорциональна разности скоростей  и частота тока в обмотке ротора
и частота тока в обмотке ротора
 . (8.5)
. (8.5)
Момент на валу двигателя  зависит от мощности и на валу
зависит от мощности и на валу  и частоты вращения п:
и частоты вращения п:
 (8.6)
(8.6)
Механическая характеристика асинхронного двигателя представляет собой зависимость развиваемого момента на валу от скорости вращения или от скольженияпри U 1 = const и f 1 = const (рисунок 8.2). На рисунке 8.2 обозначено критическое скольжение  , критический (максимальный) момент
, критический (максимальный) момент  и пусковой момент
и пусковой момент  .
.

Рисунок 8.2 – Механическая характеристика асинхронного двигателя
Зная максимальный (критический) момент , можно построить приблизительную механическую характеристику по формуле:
 , (8.7)
, (8.7)
где
=  . (8.8)
. (8.8)
где  – кратность максимального момента, т.е. отношение максимального момента при номинальном напряжении к номинальному.
– кратность максимального момента, т.е. отношение максимального момента при номинальном напряжении к номинальному.
Машина постоянного тока (рисунок 8.3)состоит из неподвижной части – индуктора, и подвижной части. Индуктор состоит из полюсов и стального ярма, к которому прикрепляются полюсы 1 с обмоткой возбуждения, создающие основной магнитный поток. Вращающаяся часть машины состоит из укрепленных на валу цилиндрического якоря 2 и коллектора 3. В пазы на внешней поверхности якоря укладываются катушки обмотки якоря. Концы витка соединены с изолированными от вала медными пластинами коллектора, которые вместе составляют кольцо. Для отвода/подвода тока к вращающемуся коллектору на него нажимают две неподвижные щетки 4, с помощью которых обмотка якоря соединяется с внешней цепью.
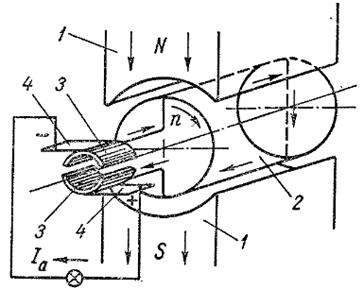
Рисунок 8.3 – Устройство простейшей машины постоянного тока
В генераторе постоянного тока коллектор является механическим выпрямителем, который преобразовывает переменный ток обмотки якоря в постоянный ток во внешней цепи. Напряжение постоянного тока на зажимах якоря генератора будет меньше ЭДС якоря Ea на величину падения напряжения в сопротивлении обмотки якоря ra:
 . (8.9)
. (8.9)
В генераторе при установившемся режиме работы электромагнитный момент равен:
 , (8.10)
, (8.10)
где  – момент на валу генератора, развиваемый первичным двигателем;
– момент на валу генератора, развиваемый первичным двигателем;
 – момент сил трения;
– момент сил трения;
 – тормозной момент, вызываемый потерями на гистерезис и вихревые токи в сердечнике якоря.
– тормозной момент, вызываемый потерями на гистерезис и вихревые токи в сердечнике якоря.
Развиваемая электромагнитным моментом мощность называют электромагнитной мощностью  :
:
 , (8.11)
, (8.11)
где  – представляет собой угловую скорость вращения.
– представляет собой угловую скорость вращения.
По способу возбуждения ГПТ делятся на: генераторы независимого возбуждения и генераторы с самовозбуждением (рисунок 8.4).

Рисунок 8.4 – Способы возбуждения ГПТ: а – независимое,
б – параллельное, в – последовательное, г – смешанное
Генераторы независимого возбуждения делятся на генераторы с электромагнитным возбуждением, в которых обмотка возбуждения питается постоянным током от постороннего источника (аккумуляторная батарея, вспомогательный генератор выпрямитель переменного тока и др.), и на магнитоэлектрические генераторы с полюсами в виде постоянных магнитов.
В генераторах с самовозбуждением обмотки возбуждения питаются электрической энергией, вырабатываемой в самом генераторе. Генераторы с самовозбуждением в зависимости от способа включения обмоток возбуждения делятся на 1) генераторы параллельного возбуждения, или шунтовые, 2) генераторы последовательного возбуждения, или сериесные 3) генераторы смешанного возбуждения, или компаундные.
В режиме двигателя коллектор превращает потребляемый из внешней цепи постоянный ток в переменный ток в обмотке якоря. Напряжение, приложенное к якорю машины в режиме двигателя равно:
 . (8.12)
. (8.12)
В двигателе при установившемся режиме работы электромагнитный момент равен:
 , (8.13)
, (8.13)
где – тормозной момент на валу двигателя, развиваемый рабочей машиной.
ЭДС якоря можно определить как
 , (8.14)
, (8.14)
где  – конструктивный коэффициент, постоянный для конкретного типа машины;
– конструктивный коэффициент, постоянный для конкретного типа машины;
 – основной намагничивающий поток.
– основной намагничивающий поток.
Электромагнитный момент также может быть найден через намагничивающий поток:
 , (8.15)
, (8.15)
где  .
.
Способы пуска двигателей постоянного тока:
1) прямой, при котором обмотка якоря подключается непосредственно к сети; 2) реостатный, при котором в цепь якоря включается пусковой реостат для ограничения тока;
3) путем плавного повышения питающего напряжения, которое подается на обмотку якоря.
Ток в двигателе равен
 . (8.16)
. (8.16)
При пуске двигателя n = 0 и Ea = 0, тогда  . В нормальных машинах
. В нормальных машинах  очень мало и в связи с этим ток якоря при пуске может в десятки раз превышать номинальное значение. В связи с этим прямой пуск применяют только для двигателей малой мощности, в которых
очень мало и в связи с этим ток якоря при пуске может в десятки раз превышать номинальное значение. В связи с этим прямой пуск применяют только для двигателей малой мощности, в которых  .
.
Для снижения пускового тока в двигателях большой и средней мощности применяют реостатный пуск, включая в цепь якоря реостат. В этом случае ток якоря равен:
 , (8.17)
, (8.17)
где  – сопротивление пускового реостата.
– сопротивление пускового реостата.
При пуске двигателя сопротивление реостата максимально, его подбирают таким образом, чтобы  для машин большой и средней мощности и
для машин большой и средней мощности и  для машин малой мощности. При разгоне двигателя сопротивление пускового реостата постепенно уменьшают, в конце концов, полностью исключая его из цепи якоря.
для машин малой мощности. При разгоне двигателя сопротивление пускового реостата постепенно уменьшают, в конце концов, полностью исключая его из цепи якоря.
Синхронные машины используют главным образом в качестве источников электрической энергии переменного тока. Их устанавливают на мощных тепловых, гидравлических и атомных электростанциях и транспортных установках (тепловозах, автомобилях, самолетах). Конструкция синхронного генератора определяется в основном типом привода. В зависимости от этого различают турбогенераторы (приводятся во вращение паровыми или газовыми турбинами), гидрогенераторы (приводятся во вращение гидротурбинами) и дизель-генераторы (приводятся во вращение двигателями внутреннего сгорания).
Ротор синхронной машины вращается с той же скоростью и в том же направлении как и вращающееся магнитное поле. Статор 1 (рисунок 8.5) имеет такое же устройство, как и статор асинхронной машины.
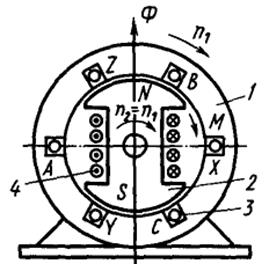
Рисунок 8.5 – Схема синхронной машины
Трехфазная или в общем случае n -фазная обмотка статора синхронной машины 3 выполняется с таким же чистом полюсов, как и ротор, и называется также обмоткой якоря. Сердечник статора вместе с обмоткой называется также якорем. Ротор 2 имеет обмотку возбуждения 4, питаемую через два контактных кольца и щетки постоянным током от постороннего источника. В качестве источника чаще всего служит генератор постоянного тока относительно небольшой мощности, который называется возбудителем и устанавливается обычно на одном валу с синхронной машиной. Назначение обмотки возбуждения – создание в машине первичного магнитного поля.
Если ротор привести во вращение с некоторой скоростью n 2 и возбудить его, то поток возбуждения Ф будет пересекать проводники обмотки статора и в фазах последней будут индуцироваться ЭДС с частотой
 . (8.18)
. (8.18)
При нагрузке обмотка статора создает такое же по своему характеру вращающееся магнитное поле, как и обмотка статора асинхронной машины. Это поле статора вращается в направлении вращения ротора со скоростью
 . (8.19)
. (8.19)
Из (8.18) и (8.19) следует
 . (8.20)
. (8.20)
Поля статора и ротора вращаются с одинаковой скоростью, т.е. синхронно, и образуют, таким образом, общее вращающееся поле.
Включение синхронных генераторов на параллельную работу с сетью.
На каждой электрической станции обычно бывает установлено несколько генераторов, которые включаются на параллельную работу в общую сеть. Все параллельно работающие генераторы должны отдавать в сеть ток одинаковой частоты. Поэтому они должны вращаться строго в такт, т.е. синхронно.
Условия синхронизации генераторов:
1) напряжение включаемого генератора U должно быть равно напряжению сети U или уже работающего генератора;
2) частота генератора f, должна равняться частоте сети;
3) чередование фаз генератора и сети должно быть одинаково;
4) напряжения U Г, и U С должны быть в фазе.
Синхронные двигатели и синхронные компенсаторы.
Синхронные двигатели имеют по сравнению с асинхронными большое преимущество, заключающееся в том, что благодаря возбуждению постоянным током они могут работать с cos φ = 1 и не потребляют при этом реактивной мощности из сети, а при работе с перевозбуждением даже отдают реактивную мощность в сеть. В результате улучшается коэффициент мощности сети и уменьшаются падение напряжения и потери в ней, а также повышается коэффициент мощности генераторов, работающих на электростанциях.
Максимальный момент синхронного двигателя пропорционален U, а у асинхронного двигатели U 2. Поэтому при понижении напряжения синхронный двигатель сохраняет большую нагрузочную способность. Кроме того, использование возможности увеличения тока возбуждения синхронных двигателей позволяет увеличивать надежность их работы при аварийных понижениях напряжения в сети и улучшать в этих случаях условия работы энергосистемы в целом. Вследствие большого воздушного зазора добавочные потери в стали в клетке ротора синхронных двигателей меньше, чем АД, благодаря чему КПД синхронных двигателей обычно выше.
С другой стороны, конструкция синхронных двигателей сложнее, чем короткозамкнутых асинхронных двигателей, и, кроме того, синхронные двигатели должны иметь возбудитель или иное устройство для питания обмотки возбуждения постоянным током. Вследствие этого синхронные двигатели в большинстве случаев дороже асинхронных двигателей с короткозамкнутым ротором. Пуск и регулирование скорости вращения синхронных двигателей также сложнее. Тем не менее, их целесообразно применять всюду, где не требуется частых пусков и остановок и регулирования скорости вращения.
Для синхронного двигателя справедливы многие электромеханические соотношения, применяемые при расчете асинхронных двигателей и двигателей постоянного тока: (8.6), (8.11), (8.13).
Синхронный компенсатор представляет собой синхронный двигатель, работающий без нагрузки на валу; при этом по обмотке якоря проходит практически только реактивный ток.
Синхронные компенсаторы предназначаются для компенсации коэффициента мощности сети и поддержания нормального уровня напряжения сети в районах сосредоточения потребительских нагрузок. Нормальным является перевозбужденный режим работы синхронного компенсатора, когда он отдает в сеть реактивную мощность. В периоды спада потребительских нагрузок (например, ночью) напряжение сети стремится возрасти и для поддержания его на нормальном уровне необходимо загрузить сеть индуктивными токами, вызывающими в ней дополнительные падения напряжения. В этих случаях синхронные компенсаторы работают в недовозбужденном режиме, когда они потребляют из сети индуктивный ток и реактивную мощность. Для этого каждый синхронный компенсатор снабжается автоматическим регулятором возбуждения или напряжения, который регулирует его ток возбуждения так, что напряжение на зажимах компенсатора остается постоянным.
Пример 1.
Номинальная мощность трехфазного четырехполюсного асинхронного двигателя с короткозамкнутым ротором P ном = 10 кВт, номинальное напряжение U ном = 380 В, номинальная частота вращения ротора n ном = 1420 об/мин, номинальный КПД η ном = 0.84 и номинальный коэффициент мощности cos φ ном = 0,85. Кратность пускового тока I пуск/ I ном = 6,5, а перегрузочная способность двигателя равна  =1,8. Определить:
=1,8. Определить:
1) потребляемую мощность;
2) номинальный и максимальный вращающие моменты;
3) пусковой ток;
4) номинальное и критическое скольжение.
Решение.
Потребляемая мощность:
P 1ном = P ном / ηном =10/0,84=11,9 кВт.
Номинальный и максимальный моменты:
 Н·м.
Н·м.
 Н·м.
Н·м.
Номинальный и пусковой токи:
 А.
А.
 А.
А.
Номинальное и критическое скольжение:
 ,
,
где  =50/2=25 об/сек=1500 об/мин.
=50/2=25 об/сек=1500 об/мин.
 .
.
Пример 2.
Генератор постоянного тока параллельного возбуждения имеет номинальные параметры: P ном = 5,2 кВт, U ном = 230 В, n ном = 2860 об/мин. Сопротивление обмотки якоря  = 0,75 Ом, сопротивление цепи возбуждения R в = 154 Ом, механические и магнитные потери составляют 4% от номинальной мощности генератора. Определить момент на валу первичного двигателя.
= 0,75 Ом, сопротивление цепи возбуждения R в = 154 Ом, механические и магнитные потери составляют 4% от номинальной мощности генератора. Определить момент на валу первичного двигателя.
Решение:
Номинальный ток нагрузки:
 А.
А.
Ток возбуждения:
 А.
А.
Ток якоря при номинальной нагрузке:
 А.
А.
ЭДС генератора:
 В.
В.
Потери в МПТ состоят из механических и магнитных потерь, а также потерь в цепях якоря и возбуждения.
Потери в обмотке якоря и в цепи возбуждения:
 Вт.
Вт.
 Вт.
Вт.
Сумма механических потерь по условию
 Вт.
Вт.
Суммарные потери:
 Вт.
Вт.
Мощность на валу первичного двигателя:
 Вт.
Вт.
Момент на валу первичного двигателя:
 Н·м.
Н·м.
Пример 3.
Определить номинальный момент, линейный ток статора, активную и реактивную мощность, потребляемую из сети синхронным двигателем. Номинальные параметры двигателя: P ном = 990 кВт, U ном = 6 кВ,, cos φ ном = 0,8 (опереж.) n ном = 1000 об/мин, η ном = 85 %.
Решение:
Номинальная угловая скорость ротора:
 рад/с.
рад/с.
Номинальный момент:
 Н·м.
Н·м.
Обмотка статора обычно соединяется звездой, в этом случае линейный ток статора равен:
 А.
А.
Активная и реактивная мощности, потребляемые из сети:
 кВт,
кВт,
 кВАр.
кВАр.
Задания
1. Трехфазный асинхронный двигатель имеет следующие параметры: P ном = 75 кВт, номинальная частота вращения ротора n ном = 735 об/мин, номинальный КПД ηном = 0,92 и номинальный коэффициент мощности cosφном = 0,85. Определить полную мощность двигателя в номинальном режиме, а также максимальный момент, если критическое скольжение равно 0,07.
2. Четырехполюсный трехфазный асинхронный двигатель включен в трехфазную сеть частотой 60 Гц и вращается с частотой 1746 об/мин. Каково скольжения двигателя в этом режиме?
3. Двигатель постоянного тока параллельного возбуждения, присоединенный к сети напряжением 220 В, потребляет при номинальной нагрузке ток  20,5 А. Сопротивление обмотки якоря
20,5 А. Сопротивление обмотки якоря  = 0,75 Ом, сопротивление цепи возбуждения R в = 258 Ом, механические и магнитные потери составляют 329,3 Вт. Номинальная частота вращения n ном = 1025 об/мин. Определить номинальную мощность на валу двигателя, номинальный КПД, номинальный вращающий момент, пусковой ток при пуске двигателя без пускового реостата, сопротивление пускового реостата для условия
= 0,75 Ом, сопротивление цепи возбуждения R в = 258 Ом, механические и магнитные потери составляют 329,3 Вт. Номинальная частота вращения n ном = 1025 об/мин. Определить номинальную мощность на валу двигателя, номинальный КПД, номинальный вращающий момент, пусковой ток при пуске двигателя без пускового реостата, сопротивление пускового реостата для условия  .
.
4. Определить номинальный момент, номинальный КПД, активную и реактивную мощность, потребляемую из сети синхронным двигателем. Номинальные параметры двигателя: P ном = 4000 кВт, U ном = 6 кВ,, cos φ ном = 0,8 (опереж.) n ном = 3000 об/мин, I ном = 443 А.
Контрольные вопросы
1. Назовите основные элементы асинхронной машины.
2. Как определить частоту вращения статора асинхронного двигателя? ротора?
3. Что такое скольжение?
4. Покажите на механической характеристике асинхронного двигателя критический момент и критическое скольжение.
5. Назовите основные элементы машины постоянного тока.
6. Как определить напряжение на якоре машины постоянного тока в режиме двигателя и в режиме генератора?
7. Как зависит электромагнитный момент от тока якоря в двигателе постоянного тока?
8. Как определить ЭДС якоря через частоту вращения?
9. Зачем включают в цепь якоря добавочные сопротивления при пуске?
10. Назовите основные элементы синхронной машины.
11. Что такое синхронный компенсатор, для чего его применяют?
12. В чем заключаются достоинства и недостатки синхронных двигателей по сравнению с асинхронными?
Список литературы, рекомендуемый к использованию по данной теме
Основная литература
1. Немцов М.В. Электротехника и электроника (6-е изд., стер.) учебник. –М: Академия, 2013. – 480 с. – ISBN: 9785446804320.
2. Электротехника и электроника: Учебное пособие для вузов / В.В. Кононенко [и др.]; под ред. В.В. Кононенко. – Изд. 6-е – Ростов н/Д: Феникс, 2010. – 784 с. (Высшее образование). – ISBN 978-5-222-17568-2.
Дополнительная литература
3. Касаткин А.С. Электротехника: Учеб. для вузов / А. С. Касаткин, М. В. Немцов. - 12-е изд. – М.: Академия, 2008. - 544 с. – ISBN 9785769557729.
4. Вольдек А.И. Электрические машины: машины переменного тока: учебник / А. И. Вольдек, В. В. Попов. СПб.: Питер, 2008. – 349 с.
Практическое занятие 9

