




Глава 1
Описание принципа работы асинхронного и синхронного RS-триггера. Основные отличия между ними.
RS-триггер — триггер, который сохраняет своё предыдущее состояние при нулевых входах и меняет своё выходное состояние при подаче на один из его входов единицы.
По входу S (англ. Set - установка) триггер переключается в состояние LOG1 (переходит в возбужденное состояние). По входу R (reset – сброс) триггер переключает в состояние LOG0 (невозбужденное состояние).

Рисунок 1 - Функциональная схема асинхронного RS-триггера на элементах ИЛИ-НЕ
Для RS триггеров возможны 4 состояния входных сигналов:
1. S=1, R=0 данная комбинация сигналов приводит к появлению на выходе элемента ИЛИ-НЕ 2 LOG0. Этот сигнал по цепи обратной связи поступает на вход элемента ИЛИ-НЕ 1 и на выходе этого элемента – LOG1.
2.S=0, R=1 данная комбинация входных сигналов приводит к появлению на выходе Q – LOG0, а на выходе  – LOG1.
– LOG1.
3.S=0, R=0 триггер остается в предшествующем данной комбинации сигналов состоянии.
4.S=1,R=1 запрещенная комбинация, т.к. при этом на обоих выходах появится LOG0.
Основной недостаток статических асинхронных RS триггеров – низкая помехоустойчивость.
Для улучшения помехоустойчивости триггер усложняют вводя в его состав систему управления, задача которой с помощью специально тактируемого входа С ликвидировать влияние сигнала-помехи. Переключения в синхронном RS-триггере возможны только при наличии LOG1 на входе С. Если сигнал на входе С – LOG0, то состояние триггера не меняется, таким образом основное свойство синхронного RS-триггера – задержка информации.
Описание моделей триггеров в среде Simulink.
Для того, чтобы исследовать работу триггера в среде Simulink, нужно выполнить следующее:
Ø Собрать систему источников сигналов (Pulse Generator) для исследования логических схем:
F1 - с периодом 2 с и задержкой 1 с;
F2 - с периодом 4 с и задержкой 2 с;
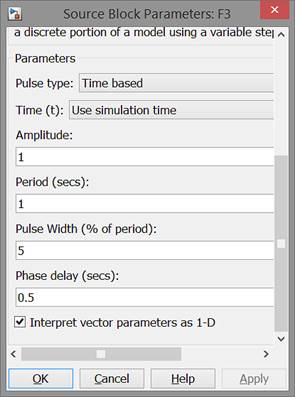

 F3 - с периодом 1 с, задержкой 0,5 с и с шириной импульса 5% от периода.
F3 - с периодом 1 с, задержкой 0,5 с и с шириной импульса 5% от периода.
Ø Настроить осциллограф (Scope) на измерение 10 сигналов на диапазоне 6 с. Параметры моделирования приложения настроить на максимальное время моделирования 6 с (Simulation ► Simulations parametrs ► Time – 6). Подписать линии связи X1, X2, strobe и просмотреть сигналы на осциллографе.



Ø Добавить в схему генераторы констант (Constant) и ключи (Manual Switch) для возможности подключения исследуемой схемы к различным источникам сигналов.

Ø Собрать триггер на элементах 2И-НЕ. Проанализировать сообщение программы. Изменить схему, добавив элемент памяти (Memory) в обратную связь. Добиться работоспособности схемы. Полученному статическому асинхронному триггеру с инверсными управляющими входами дать наименование "MODEL-1А". Изучить его поведение при всех возможных наборах входных сигналов, изменяемых автоматически генераторами или устанавливаемые вручную константами. Переключения осуществлять с помощью ключей ручного управления.
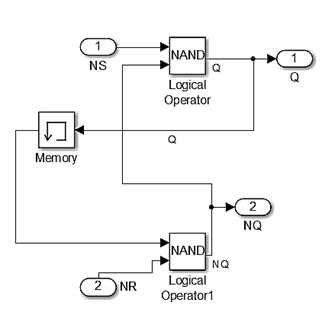
Таблица состояний асинхронного RS-триггера
Таблица 1
| QN | NS | NR | Q | NQ |
Для данного триггера комбинации имеют следующие значения: (1 1) – (память), (1 0) – (сброс), (0 1) – (установка), (0 0) – (запрещённая комбинация).

Ø Проверить работоспособность триггера из поставки пакета (S-R Flip-Flop). При необходимости преобразовать сигналы генераторов к нужному типу с помощью элемента (Data Type Conversion). Убедиться в работоспособности триггера и записать его таблицу переключений. Изучить структуру построения триггера (Edit - Loock under mask). По образцу из поставки (на базе элемента Combinatorial Logic) создать свой RS-триггер со статическими инверсными входами. Дать ему наименование "MODEL-2".
Таблица состояний триггера (S-R Flip-Flop)
Таблица 2
| N | S | R | Q | NQ |
Для данного триггера комбинации имеют следующие значения: (1 1) – (запрещённая комбинация), (1 0) – (установка), (0 1) – (сброс), (0 0) – (Память).


Ø Исследовать элемент памяти. Включить в схему датчик времени и сравнить его показания с видом сигналов генераторов в зависимости от максимального времени счета (Simulation - Simulations parametrs - Max step times).

Ø Преобразовать свою модель асинхронного RS-триггера со статическими инверсными входами ("MODEL-1А") в подсистему, обозначив входы подсистемы NS и NR, а выходы Q1 и NQ1, назначить подсистеме имя "MODEL-3А". Проверить полученную "MODEL-3А" на правильность функционирования.
Ø Преобразовать свою "MODEL-2А", обозначив ее именем "MODEL-4А". Проверить полученную "MODEL-4А" на правильность функционирования.
1.
1.1.
1.2.

