




1. УГЛЫ j3 ДОЛЖНЫ ЛЕЖАТЬ В
ПРЕДЕЛАХ ОТ 15° ДО 165°
2. МАКСИМАЛЬНАЯ РАЗНИЦА
РАССЧИТАННЫХ УГЛОВ dI и dа НЕ ДОЛЖНА
ПРЕВЫШАТЬ ЗНАЧЕНИЯ, УКАЗАННЫЕ в ТЗ
Кинематика рулевого управления с независимой подвеской
Расчет рулевого четырехзвенника
Кинематика рулевого управления с зависимой подвеской
Расчетные схемы

Исходные данные
n База автомобиля L
n Передняя колея bV
n Длина рычага рулевой трапеции r
n Углы поперечного и продольного наклона шкворня s и t
n Максимальный угол поворота внутреннего колеса dimax
n Высота центров шарниров поперечной тяги ht
n Динамическое плечо rh
Расчет угла поворота наружного колеса (по Аккерману)
На интервале от 5° до dimax с произвольным шагом
рассчитывается значение dа:


Угол поворота рычага рулевой трапеции в первом приближении

Принимается, что u≈e:

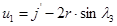
Высота шарниров поперечной тяги h:

Пересчет расстояния между цапфами:


Угол поворота рычага рулевой трапеции во втором приближении

Принимаем, что l2=l1
Фактический угол поворота:


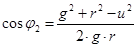
Длина g:

Ошибка угла поворота наружного колеса:

При отрицательной ошибке необходимо
изменять угол l2 до тех пор, пока при
пересчитанном угле dа1 ошибка не станет
нулевой или положительной!
Учет углов поперечного наклона шкворней

Вид на трапецию сзади и угловые проекции на плоскости,
перпендикулярные к шкворневым осям
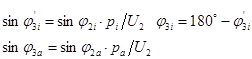
Угол поворота поперечной тяги:



Пересчет длины поперечной тяги u:

Проверка геометрии трапеции
Для угла поворота трапеции l2 углы j3 должны
быть в интервале от 15° до 165°



Рулевые механизмы
Оценочные параметры рулевых механизмов и рулевого управления
n Передаточное число is
n Коэффициент полезного действия hs
n Величина зазоров в зацеплении
Передаточные числа
Передаточное число рулевого управления
(по стандарту SAE J 670e):

dН – угол поворота рулевого колеса
Средний угол поворота управляемых колес:

Передаточное число рулевого механизма:

dС – угол поворота вала сошки
n Диапазоны передаточных чисел рулевых механизмов (не менее):
15-20 для легковых автомобилей
20-25 для грузовых автомобилей и автобусов
n Выбор: за 1.5-2.5 полных оборота руля управляемые колеса должны повернуться из нейтрального положения на максимальный угол
Коэффициент полезного действия
n Прямой КПД: передача усилия от рулевого колеса на управляемые колеса (оценка потерь на трение)
n Обратный КПД: передача усилия от управляемых колес к рулевому колесу (оценка эффекта самоторможения)
Прямой КПД

Мв – момент трения в рулевом механизме,
приведенный к рулевому валу
Мd - крутящий момент на рулевом колесе
Обратный КПД

Мс – момент трения в рулевом механизме,
приведенный к рулевой сошке
Мd - крутящий момент на рулевом колесе
Виды рулевых механизмов
Червячные рулевые механизмы
Передаточное число рулевого механизма
"цилиндрический червяк – червячный сектор":

R0 – радиус начальной окружности сектора
t – шаг нарезки
z – число заходов червяка
gч – угол наклона нарезки зубьев червяка
gс – угол наклона нарезки зубьев сектора
Прямой КПД червячного рулевого механизма:

Прямой КПД червячного рулевого механизма:

r - радиус трения
Данные по выполненным конструкциям:
n КПД "червяк – сектор" – 0,6/0,4
n КПД "глобоидальный червяк – ролик" – 0,8-0,7
n gч = 9…17°
n iРМ до 10

