




Коломенский институт (филиал)
Федерального государственного бюджетного образовательного учреждения
высшего профессионального образования
«Московский государственный открытый университет
им. В.С. Черномырдина»
| УТВЕРЖДЕНО Учебно-методическим Советом КИ МГОУ |
| НОВИКОВ В.Г. |
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
Для выполнения лабораторной работы № 4
по моделированию систем
Моделирования процессов
В ЛИНЕЙНЫХ нестационарных и нелинейных
Динамических системах
С использованием подсистемы MatLab
SIMULINK
Г. Коломна
Г.
СОДЕРЖАНИЕ
1. Краткие сведения из теории линейных нестационарных и нелинейных систем автоматического управления
1.1. Особенности процессов в линейных нестационарных системах
1.2. Особенности процессов в нелинейных САУ
1.3. Метод фазового пространства
2. Моделирования процессов в линейных нестационарных и нелинейных динамических системах с использованием подсистемы MatLab SIMULINK
2.1. Приведение линейного дифференциального уравнения к канонической форме
2.2. Пример исследования нестационарных и нелинейных процессов
3. Задание на самостоятельную работу
4. Отчетность
1. Краткие сведения из теории линейных нестационарных и нелинейных систем автоматического управления
Линейные стационарные системы занимают важное место в теории автоматического управления. Однако, “... образно говоря, линейные стационарные системы – (лишь) маленький островок в безграничном океане нелинейных и нестационарных систем ” [академик Цыпкин Я.З. -- известный советский ученый].
На практике чаще встречаются САУ, которые имеют математические модели, описываемые:
- линейными дифференциальными уравнениями с переменными коэффициентами или
- нелинейными дифференциальными уравнениями.
1.1. Особенности процессов в линейных нестационарных системах
Линейная САУ называется нестационарной, если её параметры (коэффициенты, постоянные времени и т.п.) меняются во времени. Это обстоятельство приводит к изменению коэффициентов соответствующего дифференциального уравнения. Оно также служит признаком нестационарности системы.
Так как коэффициенты дифференциального уравнения стационарной САУ зависят от времени, то логично предположить, что от этого же времени будут зависеть все её свойства, в том числе: устойчивость, качество переходных процессов, характеристики установившегося состояния при любых типах входных воздействий.
В отличие от линейных стационарных систем, обладающих характеристическим уравнением с постоянными коэффициентами, линейные нестационарные САУ имеют характеристическое уравнение в виде нелинейного дифференциального уравнения.
Найти его корни и по ним оценить устойчивость нестационарной САУ практически невозможно даже в системе второго порядка.
Поэтому иногда пытаются судить о свойствах нестационарной САУ по корням так называемого формального характеристического уравнения, получаемого обычным формальным путем (заменой знака дифференцирования оператором p=d/dt) из соответствующего дифференциального уравнения.
Например, для дифференциального уравнения
 (1)
(1)
формальное характеристическое уравнение имеет вид
 . (2)
. (2)
Уравнение (2) позволяет в первом приближении судить о свойствах нестационарной САУ, если его коэффициенты сравнительно медленно меняются во времени. Для этого используется метод “ замороженных ” коэффициентов.
Данный метод используется в двух вариантах:
· “замораживание” с постоянными параметрами;
· “замораживание” с переменными параметрами.
В первом варианте, чтобы получить постоянные параметры, поступают, следующим образом:
- берут дифференциальное уравнение вида (1);
- задаются некоторым временем  , вблизи которого хотят узнать о свойствах САУ;
, вблизи которого хотят узнать о свойствах САУ;
- вычисляют коэффициенты уравнения типа (1) при  , вследствие чего приходят к дифференциальному уравнению с постоянными коэффициентами.
, вследствие чего приходят к дифференциальному уравнению с постоянными коэффициентами.
Далее, по этому дифференциальному уравнению судят о всех свойствах нестационарной САУ вблизи точки .Эти суждения тем ближе к истине, чем медленнее меняются во времени коэффициенты уравнения (1).
Во втором варианте (“замораживание” с переменными параметрами) за характеристическое уравнение нестационарной САУ берут уравнение вида (2). Его корни будут уже функциями времени. Если они медленно меняются во времени, то информация о поведении САУ во времени более достоверна, чем при полном замораживании коэффициентов. Однако при сильном изменении параметров оба метода могут приводить к принципиальным ошибкам.
Таким образом, выявляется еще одна особенность нестационарных САУ: в них нельзя говорить об устойчивости в целом, а можно говорить лишь об устойчивости отдельных компонент вектора состояния или вектора выхода.
1.2. Особенности процессов в нелинейных САУ
Система автоматического управления называется нелинейной, если в ней содержится хотя бы один нелинейный элемент. Это приводит в общем случае или к системе нелинейных дифференциальных и алгебраических уравнений, или к единому нелинейному дифференциальному уравнению САУ.
 Рисунок 1 - Схема нелинейного элемента Рисунок 1 - Схема нелинейного элемента
|
На структурных схемах нелинейные элементы  изображаются в виде, как это представлено на рисунке 1, где
изображаются в виде, как это представлено на рисунке 1, где  - входной, а
- входной, а  - выходной сигналы.
- выходной сигналы.
Из-за наличия нелинейных элементов в нелинейных САУ проявляются свойства, которых нет в системах линейных.
 Рисунок 2 - Фазовые портреты нелинейной САУ
Рисунок 2 - Фазовые портреты нелинейной САУ
|
Главное из них заключается в особой чувствительности нелинейных САУ к начальным условиям и внешним возмущениям. Проявляется это в наличии устойчивых периодических режимов - автоколебаний, а также во влиянии внешних возмущений на устойчивость нелинейной системы. Эти явления в линейных САУ отсутствуют как таковые.
Из-за особенностей нелинейных систем для их исследования было введено понятие так называемого фазового пространства. Обычно это пространство, координатами (фазами) которого являются регулируемая величина и ее производные до  -го порядка, где
-го порядка, где  - порядок САУ.
- порядок САУ.
Чаще всего для исследования нелинейных систем используют частный случай фазового пространства - так называемую фазовую плоскость. Она представлена на рисунке 2, где в качестве оси абсцисс выступает регулируемая величина , а в качестве оси ординат используется ее производная  .
.
Если нелинейная САУ устойчива (неустойчива) вблизи начала координат фазового пространства, то говорят, что она устойчива (неустойчива) в “малом”. Если нелинейная САУ устойчива (неустойчива) вдали от начала координат, то говорят, что такая система устойчива (неустойчива) в “большом”. Оба эти состояния - и “большое”, и “малое” - разделяет граничная поверхность, которая может характеризовать или границу области устойчивости по возмущениям, или автоколебательный процесс.
Поведение нелинейной САУ в фазовом пространстве отображается так называемой фазовой траекторией. Под ней понимают графическое изображение пути из любого начального состояния САУ в любое её конечное состояние. Совокупность фазовых траекторий часто называют фазовым портретом. На рисунке 2 представлен фазовый портрет устойчивой в “малом” (из  - в ноль) и неустойчивой в “большом” (из
- в ноль) и неустойчивой в “большом” (из  - в бесконечность) нелинейной системы.
- в бесконечность) нелинейной системы.
1.3. Метод фазового пространства
Основу метода фазового пространства составляют все способы, позволяющие изобразить траекторию движения САУ из одного состояния в другое в соответствующем фазовом пространстве. Особенно наглядно представляется движение САУ на фазовой плоскости, если известны аналитические формулы для некоторых видов процессов.
Пусть САУ переходит из одного состояния в другое по экспоненте
 . (3)
. (3)
Следовательно,
 . (4)
. (4)
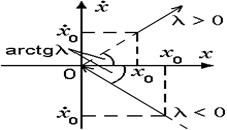 Рисунок 3 - Фазовые траектории Рисунок 3 - Фазовые траектории
|
На фазовой плоскости выражение  представляет собой уравнение прямой, проходящей через начало координат. При отрицательной величине параметра
представляет собой уравнение прямой, проходящей через начало координат. При отрицательной величине параметра  процесс (3) затухает со временем. Следовательно, стрелка на прямой направлена к началу координат комплексной плоскости (см. рисунок 3). При положительной величине
процесс (3) затухает со временем. Следовательно, стрелка на прямой направлена к началу координат комплексной плоскости (см. рисунок 3). При положительной величине  прямая уходит в бесконечность, а стрелка направлена от начала координат комплексной плоскости. На рис.3 представлены соответствующие траектории движения системы (3). При этом
прямая уходит в бесконечность, а стрелка направлена от начала координат комплексной плоскости. На рис.3 представлены соответствующие траектории движения системы (3). При этом  .
.
Найдём теперь траекторию движения характеристической точки на фазовой плоскости, если процесс имеет форму синусоиды
 . (5)
. (5)
При этом для скорости процесса справедливо соотношение
 . (6)
. (6)
После возведения в квадрат выражений (5),(6) и несложных преобразований (с учётом тождества  ) можно получить выражение
) можно получить выражение
 . (7)
. (7)
Это уравнение эллипса с полуосями  и
и  . Как следствие, при представлении синусоиды (5) на фазовой плоскости будет наблюдаться движение характеристической точки
. Как следствие, при представлении синусоиды (5) на фазовой плоскости будет наблюдаться движение характеристической точки  по эллипсу (7). Его же часто называют циклом.
по эллипсу (7). Его же часто называют циклом.
 Циклы могут быть устойчивые и неустойчивые. Если характеристическая точка стремится удалиться от цикла (7), то его называют неустойчивым. Если эта точка стремится к циклу (7) и из “малого”, и из “большого”, то его называют устойчивым. Частные случаи устойчивых и неустойчивых циклов представлены на рисунке 4.
Циклы могут быть устойчивые и неустойчивые. Если характеристическая точка стремится удалиться от цикла (7), то его называют неустойчивым. Если эта точка стремится к циклу (7) и из “малого”, и из “большого”, то его называют устойчивым. Частные случаи устойчивых и неустойчивых циклов представлены на рисунке 4.
В случае устойчивого цикла фазовые траектории «навиваются» на эллипс, а в случае неустойчивого - уходят от него в ноль или в бесконечность.
Моделирования процессов в линейных нестационарных и нелинейных динамических системах с использованием подсистемы MatLab SIMULINK

