




К ним относят ИМ, у которых скорость не зависит от величины управляющего сигнала.
Уравнение движения  (8-1)
(8-1)
Передаточная функция  , (8-2)
, (8-2)
где Тс – время действия ИМ.
Скоростная характеристика ИМ (Рис. 8.1)

Рис. 8.1 Скоростная характеристика.
 - скорость перемещения выходного устройств ИМ.
- скорость перемещения выходного устройств ИМ.
Динамическая характерисика (Рис. 8.2)
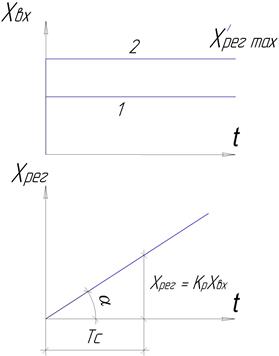
Рис. 8.2 Динамическая характеристика ИМ.
1,2 - величины выходного воздействия
Здесь скорость перемещения выходного устройства ИМ не зависит от величины воздействия.  - скорость перемещения выходного устройства ИМ.
- скорость перемещения выходного устройства ИМ.
Для реальных ИМ с постоянной скоростью скоростная характеристика имеет зону нечувствительности пускового устройства  (Рис. 8.3).
(Рис. 8.3).

Рис. 8.3 Скоростная характеристика реального ИМ.
В качестве пускового устройства используется, как правило, электромагнитные устройства, как-то магнитные пускатели или электромагнитные реле.
Электрический ИМ может находится в 3-х состояниях:
1) вращение ротора с постоянной скоростью в направлении (+);
2) неподвижность;
3) вращение ротора в направлении (-) – в противоположном (+) направлении.
Применение пусковых устройств усложняет характеристику ИМ, т.к. гистерезисные явления в магнитных цепях приводят к появлению зон возврата  , при этом ИМ отключаются при несколько меньших значениях входного сигнала
, при этом ИМ отключаются при несколько меньших значениях входного сигнала  , чем при включении.
, чем при включении.
Функциональная схема промышленных регуляторов с нелинейным элементом в прямом канале усиления представлена на Рис. 8.4.

Рис. 8.4 Функциональная схема регулятора с релейными элементами.
УОС-RС-цепочка, инерционное звено  порядка, РЭ- реальный элемент (3-х позиционное реле).
порядка, РЭ- реальный элемент (3-х позиционное реле).
Статическая характеристика 3-х позиционного реле (Рис. 8.5). Здесь  - выходной сигнал КУУ, входящий на релейный элемент,
- выходной сигнал КУУ, входящий на релейный элемент,  - выходной сигнал РЭ- на ИМ и УОС.
- выходной сигнал РЭ- на ИМ и УОС.

Рис. 8.5 Статическая характеристика трехпозиционного реле.
- зона не чувствительности (  - полузона),
- полузона),  - зона возврата.
- зона возврата.
Таким образом, характеристики ИМ с постоянной скоростью перемещения выходного устройства, включающего пусковое устройство, является существенно нелинейной и всякая линейная аппроксимация статической характеристики приводит к качественным отличиям в работе реальной АСР от идеальной.
Регуляторы такого состава относятся к релейно-импульсным автоматическим регуляторам, и режим его работы называется релейно-импульсным. Однако статическая характеристика регулятора может быть близка к линейной.
При подачи на вход ИБ релейно-импульсного регулятора ступенчатого сигнала  (например, перемещением ручки задатчика) сигнала на выходе КУУ будет иметь значение
(например, перемещением ручки задатчика) сигнала на выходе КУУ будет иметь значение  . При превышении этим сигналом зоны нечувствительности прямого хода трехпозиционного реле
. При превышении этим сигналом зоны нечувствительности прямого хода трехпозиционного реле  , в момент времени
, в момент времени  произойдет включение реле и ступенчатый сигнал через пусковое устройство включит ИМ, который начнет перемещаться с постоянной скоростью
произойдет включение реле и ступенчатый сигнал через пусковое устройство включит ИМ, который начнет перемещаться с постоянной скоростью  . Одновременно сигнал поступит на вход УОС.
. Одновременно сигнал поступит на вход УОС.
ИМ с постоянной скоростью находят широкое применение в АСР, в т.ч. для энерго-оборудования котлотурбинных и реакторных цехов на базе электрической ветви средств автоматизации.
Их достоинства: простота в эксплуатации, удобства монтажа и наладки, отсутствие ограничений пространственного расположения, высокая скорость передачи информации. Однако надежность работы электродвигателей заметно снижается при их использовании в условиях горячих цехов с высокой влажностью, на участках с повышенной вибрацией.
На базе электрических двигателей трудно построить компактный ИМ большой мощности. Электродвигатели общепромышленного назначения, как и любые электрические устройства, нельзя применять на взрыво и пожароопастных участках промышленных производств.

