




Моменты инерции данного тела относительно разных осей будут, вообще говоря, разными. Покажем, как зная момент инерции относительно какой-нибудь одной оси, проведенной в теле, найти момент инерции относительно любой другой оси, ей параллельной.
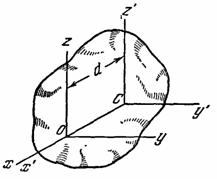
Рис.35
Проведем через центр масс С тела произвольные оси Cx'y'z', а через любую точку О на оси Сх' - оси Oxyz, такие, что Оy Сy', Oz Cz' (рис. 35). Расстояние между осями Cz' и Оz обозначим через d. Тогда

но, как видно из рисунка, для любой точки тела  или
или  , а
, а  . Подставляя эти значения
. Подставляя эти значения  , в выражение для
, в выражение для  и вынося общие множители d 2 и 2d за скобки, получим
и вынося общие множители d 2 и 2d за скобки, получим

В правой части равенства первая сумма равна Icz', а вторая - массе тела М. Найдем значение третьей суммы. На основании формул для координат центра масс  .Так как в нашем случае точка С является началом координат, то x C = 0 и, следовательно,
.Так как в нашем случае точка С является началом координат, то x C = 0 и, следовательно,  . Окончательно получаем:
. Окончательно получаем:
Формула выражает следующую теорему Гюйгенса:
Момент инерции тела относительно данной оси равен моменту инерции относительно оси, ей параллельной, проходящей через центр масс тела, сложенному с произведением массы всего тела на квадрат расстояния между осями.
Дифференциальные уравнения движения системы
Рассмотрим систему, состоящую из п материальных точек. Выделим какую-нибудь точку системы с массой  . Обозначим равнодействующую всех приложенных к точке внешних сил (и активных и реакций связей) через
. Обозначим равнодействующую всех приложенных к точке внешних сил (и активных и реакций связей) через  , а равнодействующую всех внутренних сил - через
, а равнодействующую всех внутренних сил - через  . Если точка имеет при этом ускорение
. Если точка имеет при этом ускорение  , то по основному закону динамики
, то по основному закону динамики
 .
.
Аналогичный результат получим для любой точки. Следовательно, для всей системы будет:
Эти уравнения, из которых можно определить закон движения каждой точки системы, называются дифференциальными уравнениями движения системы в векторной форме. Уравнения являются дифференциальными, так как  ; входящие в правые части уравнений силы будут в общем случае зависеть от времени, координат точек системы и их скоростей.
; входящие в правые части уравнений силы будут в общем случае зависеть от времени, координат точек системы и их скоростей.
Проектируя на какие-нибудь координатные оси, мы можем получить дифференциальные уравнения движения системы в проекциях на эти оси.
Полное решение основной задачи динамики для системы состояло бы в том, чтобы, зная заданные силы, проинтегрировать соответствующие дифференциальные уравнения и определить таким путем закон движения каждой из точек системы в отдельности.
Однако такой путь решения обычно не применяется по двум причинам. Во-первых, этот путь слишком сложен и почти всегда связан с непреодолимыми математическими трудностями. Во-вторых, в большинстве случаев при решении задач механики бывает достаточно знать некоторые суммарные характеристики движения системы в целом, а не движение каждой из ее точек в отдельности. Эти суммарные характеристики определяются с помощью общих теорем динамики системы, к изучению которых мы и перейдем.
Основная роль уравнений состоит в том, что они, или следствия из них, являются исходными для получения соответствующих общих теорем.
Общие теоремы динамики механической системы: теоремы о движении центра масс механической системы и об изменении количества движения, теоремы об изменении кинетического момента и кинетической энергии, -являются следствием основного уравнения динамики. Данные теоремы рассматривают не движение отдельных точек и тел, входящих в механическую систему, а некоторые интегральные характеристики, такие как движение центра масс механической системы, ее количество движения, кинетический момент и кинетическую энергию. В результате из рассмотрения исключаются неизвестные внутренние силы, а в ряде случаев и реакции связей, что существенно упрощает решения задачи.

