




Кинематические диаграммы - это графики функций перемещений, скоростей и ускорений характерных точек звеньев в зависимости от времени, т. e. S=S(t), V=V(t), a=a(t),
или j=j(t), w=w(t), e=e(t).
Цель исследования - построить эти графики. Достоинства:
а) наглядное представление изменения кинематических характеристик
за один цикл;
б) малая трудоемкость при исследовании простых механизмов.
Недостатки:
а) точность исследования зависит от масштаба построения и от квалификации исследователя;
б) большая трудоемкость при исследовании сложных механизмов.
Исследование начинается с построения плана положений механизма и траекторий движения центров тяжести звеньев.
Планом положений механизма называется графическое представление относительных положений его звеньев, построенное в определенном масштабе.
Масштабом физической величины называют длину отрезка в мм изображающую единицу измерения этой величины.
Например (рисунок 2.6). Длина звена l1 = 0,1 м = 100 мм на чертеже изображается отрезком  1 - 20 мм (в 5 раз меньше). М 1:5. Если длина звена
1 - 20 мм (в 5 раз меньше). М 1:5. Если длина звена
2 — 12 = 1000мм, тов масштабе построения 12 = 200мм.
В ТММ вместо понятия масштаб построения пользуются понятием масштабный коэффициент.
Масштабным коэффициентом называется отношение изображаемой единицы физической величины в свойственных ей единицах измерения к длине отрезка на чертеже в мм изображающего эту величину.

Чертежная длина звена 2 (рисунок 2.13)

План положений начинают строить с исходного (нулевого) положения механизма. За нулевое положение принимается начало рабочего хода выходного звена - ползуна 3 (рисунок 2.7), начало преодоления силы полезного сопротивления - Fп.с.
Определяют нулевое положение построением нескольких пробных положений, методом засечек, пока ползун не окажется в крайнем (левом) положении, противоположном направлению силы полезного сопротивления.
Последовательность построения.
Разбиваем траекторию кривошипа на несколько частей, соответствующих равным интервалам времени (6, 12 или 24). При равно- мерном вращении кривошипа окружность будет разбита на равные части. Соединяем точку О1 с размеченными положениями. Получаем соответствующие положения кривошипа A0, A1… A6.
Методом засечек осуществляем разметку положений следующих звеньев 2 и 3. Точки В0, В3 - точки возврата ползуна (предельные положения).
Определяем траекторию движения центров тяжести звеньев механизма S2 и S3 относительно системы координат X и У.
Определим перемещение траектории центра тяжести ползуна - вдоль оси X в функции от времени
S3= S3(t).
Проводим две оси координат (рисунок 2.8а). На оси абсцисс откладывает отрезок произвольной длины -  мм, представляющий собой в масштабе mt время
мм, представляющий собой в масштабе mt время
Т (с) одного полного оборота первого звена (время цикла)

|
| А* |
Рисунок 2.7
T=60/n1=2p/w1,
где n1 - частота вращения первого звена в об/мин;
w1 - угловая скорость первого звена в 1/с.
Масштабный коэффициент времени, с/мм
mt =T/ =60/(n1 ).
Отрезок разбиваем на 6 равных частей соответствующих шести положениям механизма.
По оси ординат из точек 0, 1, 2, 3, 4, 5, 6 откладываем величину перемещения центра тяжести S3 вдоль оси X (рисунок 2.7).
Если эти отрезки откладывать прямо с плана положений механизма, то
масштабный коэффициент диаграммы перемещения центра тяжести 
вдоль оси X будет равен масштабному коэффициенту построения плана
положений

Построение диаграммы скорости перемещения центра тяжести вдоль оси X, осуществляется методом графического дифференцирования по параметру времени.
Метод хорд. Соединяем точку О с точкой 1 хордой (рисунок 2.10а). Проводим новую систему координат для диаграмм скорости 
(рисунок 2.106). Продолжим ось абсцисс влево относительно начала координат и отложим на ней отрезок произвольной длины H1 (мм). Точка Р1 называется полюсом графического дифференцирования.
Из полюса P1 проводим линию 011 параллельно хорде 01. Из подобия прямоугольных треугольников ОI1 и Р1 011 (рисунок 2.10а,б) следует

где  - приращение функции и аргумента построенные в определенных масштабах
- приращение функции и аргумента построенные в определенных масштабах 
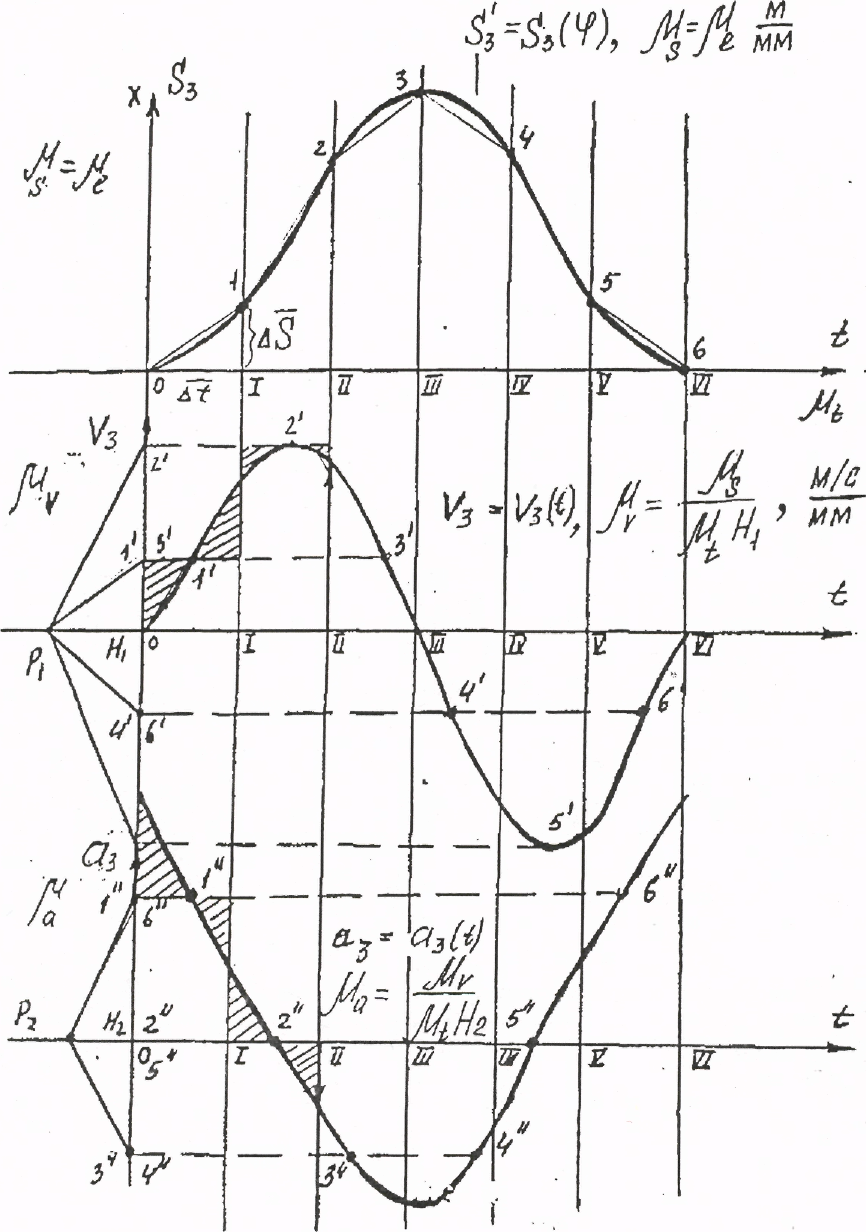
Рисунок 2.8
Истинное приращение функции и аргумента
 и
и 
откуда  скорость на 1 участке
скорость на 1 участке
Подставим эти значения в равенство (2.1). Тогда

Поскольку величина  представляет собой только масштабы построения, то отрезок
представляет собой только масштабы построения, то отрезок  с точностью до постоянного множителя изображает на диаграмме
с точностью до постоянного множителя изображает на диаграмме  среднюю скорость движения вдоль оси X на первом участке, построенную в определенном масштабе. Переносим ее в середину 1 участка.
среднюю скорость движения вдоль оси X на первом участке, построенную в определенном масштабе. Переносим ее в середину 1 участка.
Масштабный коэффициент графика скорости  или сравнивая с (2.2)
или сравнивая с (2.2)

Соединяем точки 1 и 2 хордой (рисунок 2.10а). Из полюса Р проводим Р21, параллельно хорде 12. Отрезок 021 представляет собой среднюю скорость движения на участке 1-2. Переносим ее в середину 2 участке и т.д. Полученные точки соединяем плавной кривой - 
Дифференцируя график скорости  получим график ускорения
получим график ускорения
центра тяжести  вдоль оси X (рисунок2.10в)
вдоль оси X (рисунок2.10в) 
На первом участке графика скорости O-I находим точки пересечения графика с отметками времени и соединяем их хордой. Ось абсцисс графика ускорения продолжаем влево на произвольное расстояние Н2 до точки Р2. Точка Р2 - полюс графического дифференцирования. Из точки Р2 проводим линию параллельно хорде на первом участке графика скорости до пересечения с осью ординат. Получаем точку  По аналогии отрезок
По аналогии отрезок  представляет собой в масштабе построения среднее ускорение на первом участке. Переносим ее в середину первого участка и т.д.
представляет собой в масштабе построения среднее ускорение на первом участке. Переносим ее в середину первого участка и т.д.
Полученные точки  соединим плавной кривой -т
соединим плавной кривой -т 
Масштабный коэффициент графика ускорения, (м/с)/мм

Проверка правильности построения диаграмм:
- там, где функция имеет экстремумы, производная равна 0;
- там, где функция меняет знак - производная имеет экстремумы.
Истинные значения скорости и ускорения для всех 12 положений
* Ассур Леонид Владимирович (1878-1920) опубликовал в 1914-1918 гг. «Исследование плоских стержневых механизмов с точки зрения их структуры и классификации»

