




дМС ЪБДБООПК УИЕНЩ РТПНЩЫМЕООПЗП ТПВПФБ ОЕПВИПДЙНП:
ћ ЧЩЧЕУФЙ ЖПТНХМЩ, ПРТЕДЕМСАЭЙЕ ЕЗП ЛЙОЕНБФЙЮЕУЛЙЕ РБТБНЕФТЩ, ФП ЕУФШ ПРТЕДЕМЙФШ ЛППТДЙОБФЩ X Y Z, УЛПТПУФЙ vx vy vz Й ХУЛПТЕОЙС ax ay az ЪБИЧБФБ РП ЪБДБООЩН ЪБЛПОБН ДЧЙЦЕОЙС ЪЧЕОШЕЧ НБОЙРХМСФПТБ;
ћ ЧЩВТБФШ ОЕПВИПДЙНЩЕ ТБЪНЕТЩ ЪЧЕОШЕЧ НБОЙРХМСФПТБ, ХУФБОПЧЙФШ ОБЮБМШОЩЕ Й ЛПОЕЮОЩЕ РПМПЦЕОЙС РПДЧЙЦОЩИ ЪЧЕОШЕЧ, Б ФБЛЦЕ НБЛУЙНБМШОЩЕ РЕТЕНЕЭЕОЙС (ИПД) РПДЧЙЦОЩИ ЪЧЕОШЕЧ.
ћ РП РПМХЮЕООЩН ЖПТНХМБН УПУФБЧЙФШ РТПЗТБННХ Й ЧЩЮЙУМЙФШ ЪОБЮЕОЙС ЛЙОЕНБФЙЮЕУЛЙИ РБТБНЕФТПЧ;
ћ РП ТЕЪХМШФБФБН ЧЩЮЙУМЕОЙК РПУФТПЙФШ:
ћ ФТБЕЛФПТЙА ДЧЙЦЕОЙС ГЕОФТБ ЪБИЧБФБ Ч РТПУФТБОУФЧЕООПК УЙУФЕНЕ ЛППТДЙОБФ OXYZ;
ћ ЗТБЖЙЛЙ УЛПТПУФЕК vx vy vz Й ХУЛПТЕОЙК ax ay az Ч ЖХОЛГЙЙ ПФ ЧТЕНЕОЙ t;
ћ ЗТБЖЙЛЙ РЕТЕНЕЭЕОЙС, УЛПТПУФЙ Й ХУЛПТЕОЙС ПДОПЗП ЙЪ ЪЧЕОШЕЧ НБОЙРХМСФПТБ Ч ЖХОЛГЙЙ ПФ ЧТЕНЕОЙ t.
лППТДЙОБФЩ ОБЮБМБ ДЧЙЦЕОЙС (ФПЮЛБ б) Й ЛПОГБ ДЧЙЦЕОЙС (ФПЮЛБ ч) ЪБДБОЩ.
оЕДПУФБАЭЙЕ РБТБНЕФТЩ, ФБЛЙЕ ЛБЛ ОЕЙЪНЕОСЕНЩЕ ТБЪНЕТЩ ЪЧЕОШЕЧ, ЧТЕНС ДЧЙЦЕОЙС  , ЧТЕНС ТБЪЗПОБ Й ФПТНПЦЕОЙС t 1 ОБЪОБЮБАФУС УБНПУФПСФЕМШОП.
, ЧТЕНС ТБЪЗПОБ Й ФПТНПЦЕОЙС t 1 ОБЪОБЮБАФУС УБНПУФПСФЕМШОП.
нЕФПДЙЛБ ЛЙОЕНБФЙЮЕУЛПЗП ЙУУМЕДПЧБОЙС РТПНЩЫМЕООЩИ ТПВПФПЧ ЙЪМПЦЕОБ Ч ХЮЕВОПН РПУПВЙЙ [1]
тБУУНПФТЙН ЛПОЛТЕФОЩК РТЙНЕТ. дМС УИЕНЩ НБОЙРХМСФПТБ (ТЙУХОПЛ 1,Б) ЪБДБОЩ УЙОХУПЙДБМШОЩЕ ЪБЛПОЩ ЙЪНЕОЕОЙС ПВПВЭЕООЩИ ЛППТДЙОБФ. фТЕВХЕФУС ОБКФЙ РПМПЦЕОЙЕ ГЕОФТБ ЪБИЧБФБ Ч ОЕРПДЧЙЦОПК УЙУФЕНЕ ЛППТДЙОБФ OXYZ (S).
ЧЩЧПД ТБУЮЕФОЩИ ЖПТНХМ, ПРТЕДЕМСАЭЙИ ЛЙОЕНБФЙЮЕУЛЙЕ РБТБНЕФТЩ
ДЧЙЦЕОЙС ЪБИЧБФБ
йЪПВТБЪЙН УИЕНХ НБОЙРХМСФПТБ Ч УПУФПСОЙЙ ДЧЙЦЕОЙС (ТЙУХОПЛ 1,В). чЧЕДЕН ДПРПМОЙФЕМШОЩЕ ФТЙ РПДЧЙЦОЩЕ УЙУФЕНЩ ЛППТДЙОБФ(S1,S2 Й S3). уЙУФЕНХ O1X1Y1Z1(S1), УЧСЦЕН У ЧТБЭБАЭЕКУС ЛПМПООПК 1. пОБ РПЧЕТОХФБ ЧПЛТХЗ ПУЙ Z ПФОПУЙФЕМШОП ОЕРПДЧЙЦОПК УЙУФЕНЩ ЛППТДЙОБФ S ОБ ХЗПМ  . уЙУФЕНХ O2X2Y2Z2(S2) љ УЧСЦЕН УП ЪЧЕОПН 2. ьФБ УЙУФЕНБ ЛППТДЙОБФ РЕТЕНЕЭБЕФУС ПФОПУЙФЕМШОП УЙУФЕНЩ S1 Ч ЧЕТФЙЛБМШОПН ОБРТБЧМЕОЙЙ ЧДПМШ ПУЙ Z1 ОБ ЧЕМЙЮЙОХ l2. уЙУФЕНХ O3X3Y3Z3(S3) љУЧСЦЕН УП ЪЧЕОПН 3. ьФБ УЙУФЕНБ ЛППТДЙОБФ УНЕЭЕОБ РП ПФОПЫЕОЙА Л УЙУФЕНЕ S2 РП ПУЙ Y ОБ ЧЕМЙЮЙОХ Б Й РП ПУЙ Z ОБ ЧЕМЙЮЙОХ b. (ТЙУХОПЛ 1,В).дЧЙЦЕОЙЕ ФПЮЛЙ у Ч УЙУФЕНЕ ЛППТДЙОБФ S3 ПРЙУЩЧБЕФУС ТБДЙХУ-ЧЕЛФПТПН
. уЙУФЕНХ O2X2Y2Z2(S2) љ УЧСЦЕН УП ЪЧЕОПН 2. ьФБ УЙУФЕНБ ЛППТДЙОБФ РЕТЕНЕЭБЕФУС ПФОПУЙФЕМШОП УЙУФЕНЩ S1 Ч ЧЕТФЙЛБМШОПН ОБРТБЧМЕОЙЙ ЧДПМШ ПУЙ Z1 ОБ ЧЕМЙЮЙОХ l2. уЙУФЕНХ O3X3Y3Z3(S3) љУЧСЦЕН УП ЪЧЕОПН 3. ьФБ УЙУФЕНБ ЛППТДЙОБФ УНЕЭЕОБ РП ПФОПЫЕОЙА Л УЙУФЕНЕ S2 РП ПУЙ Y ОБ ЧЕМЙЮЙОХ Б Й РП ПУЙ Z ОБ ЧЕМЙЮЙОХ b. (ТЙУХОПЛ 1,В).дЧЙЦЕОЙЕ ФПЮЛЙ у Ч УЙУФЕНЕ ЛППТДЙОБФ S3 ПРЙУЩЧБЕФУС ТБДЙХУ-ЧЕЛФПТПН  .
.
 љљљљљљљљљљљљљљљљљљљљљљљ
љљљљљљљљљљљљљљљљљљљљљљљ 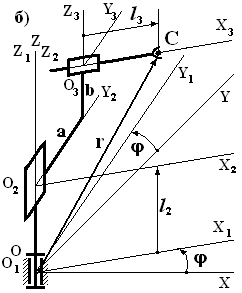
тЙУХОПЛ 1
лППТДЙОБФЩ ЧЕЛФПТБ  , ПРТЕДЕМСАЭЕЗП РПМПЦЕОЙЕ ГЕОФТБ ЪБИЧБФБ у Ч ОЕРПДЧЙЦОПК УЙУФЕНЕ ЛППТДЙОБФ OXYZ, ВХДХФ:
, ПРТЕДЕМСАЭЕЗП РПМПЦЕОЙЕ ГЕОФТБ ЪБИЧБФБ у Ч ОЕРПДЧЙЦОПК УЙУФЕНЕ ЛППТДЙОБФ OXYZ, ВХДХФ:
 ,љљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљ (1)
,љљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљ (1)
ЗДЕ  љ-ЧЕЛФПТ ФПЮЛЙ у Ч УЙУФЕНЕ S2.
љ-ЧЕЛФПТ ФПЮЛЙ у Ч УЙУФЕНЕ S2.
нБФТЙГХ РЕТЕИПДБ  ЙЪ УЙУФЕНЩ S3 Ч ОЕРПДЧЙЦОХА УЙУФЕНХ S РПМХЮЙН, ХНОПЦЙЧ НБФТЙГЩ
ЙЪ УЙУФЕНЩ S3 Ч ОЕРПДЧЙЦОХА УЙУФЕНХ S РПМХЮЙН, ХНОПЦЙЧ НБФТЙГЩ  ,
,  љЙ.
љЙ. 
 љљљљљљљљљљљљљљљљљљљљљљљљљљљљ (2)
љљљљљљљљљљљљљљљљљљљљљљљљљљљљ (2)
йУЛПНЩЕ ЛППТДЙОБФЩ ЧЕЛФПТБ r Ч ОЕРПДЧЙЦОПК УЙУФЕНЕ ЛППТДЙОБФ OXYZ ТБЧОЩ
 љљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљ (3)
љљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљ (3)
дЙЖЖЕТЕОГЙТХС РПМХЮЕООЩЕ ХТБЧОЕОЙС ФТБЕЛФПТЙЙ ГЕОФТБ ЪБИЧБФБ у РП ЧТЕНЕОЙ t, РПМХЮЙН ЧЩТБЦЕОЙС РТПЕЛГЙЙ УЛПТПУФЙ ФПЮЛЙ у ОБ ЛППТДЙОБФОЩЕ ПУЙ:
 љљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљ (4)
љљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљ (4)
еУМЙ РТПДЙЖЖЕТЕОГЙТПЧБФШ РП ЧТЕНЕОЙ БОБМЙФЙЮЕУЛЙЕ ЧЩТБЦЕОЙС ДМС УЛПТПУФЙ, ФП РПМХЮЙН РТПЕЛГЙЙ ХУЛПТЕОЙС ФПЮЛЙ у
 љљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљ (5)
љљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљљ (5)

