




Практичне заняття
Вивчення асинхронних двигунів
Мета заняття. Вивчити будову та принцип дії асинхронної машини. Навчитися визначати за паспортними даними технічні характеристики, виконувати обчислення основних параметрів.
Студенти повинні знати:
- принцип дії асинхронної машини;
- виникнення магнітного обертового поля;
- режими роботи асинхронної машини;
- конструкція ротора;
- механічні характеристики асинхронного двигуна;
- баланс активних потужностей асинхронного двигуна;
- асинхронний лінійний двигун (ЛАД);
- однофазний асинхронний двигун.
Студенти повинні вміти:
- складати електричні схеми;
- виконувати обчислення;
- визначати навантаження;
- розраховувати та визначати середні та діючі значення змінного струму;
- будувати векторні діаграми;
- розраховувати баланс активних потужностей асинхронного двигуна.
Обладнання та матеріали:
1. Інструкція до практичного заняття.
2. Матеріали контрольного блоку до практичного заняття.
3. Теоретичний блок.
Література.
- Будіщев М.С. Електротехніка, електроніка та мікропроцесорна техніка. Підручник. – Львів: Афіша, 2001. – 424 с.
- Загальна електротехніка / В.А. Вартабедян – 4-е вид.‚ перероб. и доп. – К.: Вища шк. Головне вид-во‚ 1986. – 359с.
- Мілих В.І. Електротехніка та електромеханіка: Навч. посібник. – К.: Каравела, 2006. – 376 с.
- Паначевний Б.І., Свергун Ю.Ф. Загальна електротехніка: Підручник. 2-ге вид. – К.: Каравела, 2007. – 296 с.
Порядок виконання роботи
- Вивчити теоретичні відомості.
- Розглянути будову та принцип дії асинхронних машин.
- Розглянути режими роботи асинхронної машини.
- Оглянути асинхронну машину та визначити технічні характеристики.
- Дайте відповідь на контрольні запитання.
Електричні машини
Генератори, що перетворюють механічну енергію в електричну і двигуни, що перетворюють електричну енергію в механічну мають загальну назву – електричні машини. На відміну від машин, що обертаються, трансформатори уявляють собою статичні електромагнітні пристрої. Головною характерною рисою, загальною для електричних машин і трансформаторів, є те, що вони відносяться до енергоутворюючих пристроїв, що працюють на принципі електромагнітної взаємодії.
Асинхронні машини
З числа різних видів електричних машин (двигунів, генераторів) найрозповсюдженішими є асинхронні безколекторні машини, які найчастіше використовуються як двигуни.
Асинхронна машина – це машина, при роботі якої збуджується обертове магнітне поле (магнітне поле, що обертається) і змушує обертатись ротор. Ротор обертається асинхронно відносно поля, тобто з кутовою швидкістю, відмінною від кутової швидкості поля.
Асинхронна машина винайдена в 1888 р. російським вченим Доліво–Добровольським, але і до нашого часу зберегла всі конструктивні особливості, закладені винахідником.
Асинхронна машина проста і дешева. Загальний недолік – відносна складність і неекономічність регулювання їх експлуатаційних характеристик.
Принцип дії асинхронної машини
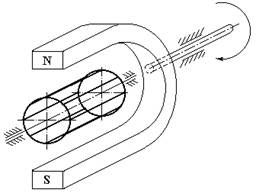 Двополюсний підковоподібний магніт обертається з постійною швидкістю. Між полюсами магніту розташований барабан – ротор, виконаний з струмоводних стрижнів у вигляді “білячого колеса”. Магнітні лінії поля при обертанні магніту перетинаючи стрижні ротора, індукують в них ЕРС, що обумовлює появу в стрижнях струмів. В результаті взаємодії струмів в стрижнях з магнітним полем виникає сила, що утворює електромагнітний обертаючий момент. Під дією цього моменту ротор починає обертатись в напрямку обертання магнітного поля. Із збільшенням швидкості обертання ротору і, відповідно, зменшенням відносної швидкості руху стрижнів в магнітному полі індуковані в них ЕРС поступово зменшуються, в зв’язку з цим зменшуються струми в стрижнях ротору і відповідно зменшується обертаючий момент. При певній швидкості обертання ротора (меншій за швидкість обертання магнітного поля) настає рівновага між магнітним обертаючим моментом і моментом опору (тертя) і далі швидкість обертання ротору при рівновазі моментів залишається постійною.
Двополюсний підковоподібний магніт обертається з постійною швидкістю. Між полюсами магніту розташований барабан – ротор, виконаний з струмоводних стрижнів у вигляді “білячого колеса”. Магнітні лінії поля при обертанні магніту перетинаючи стрижні ротора, індукують в них ЕРС, що обумовлює появу в стрижнях струмів. В результаті взаємодії струмів в стрижнях з магнітним полем виникає сила, що утворює електромагнітний обертаючий момент. Під дією цього моменту ротор починає обертатись в напрямку обертання магнітного поля. Із збільшенням швидкості обертання ротору і, відповідно, зменшенням відносної швидкості руху стрижнів в магнітному полі індуковані в них ЕРС поступово зменшуються, в зв’язку з цим зменшуються струми в стрижнях ротору і відповідно зменшується обертаючий момент. При певній швидкості обертання ротора (меншій за швидкість обертання магнітного поля) настає рівновага між магнітним обертаючим моментом і моментом опору (тертя) і далі швидкість обертання ротору при рівновазі моментів залишається постійною.
Якщо до ротора прикласти зовнішній момент опору (навантаження) то рівновага порушиться – момент опору буде більший за обертаючий момент. В результаті швидкість обертання ротора почне зменшуватись, швидкість перетинання магнітними лініями стрижнів збільшуватись, індуковані в стрижнях ЕРС і, відповідно, струми збільшуватись, збільшується обертаючий момент і, кінець–кінцем при деякій новій швидкості обертання ротора знову досягнеться рівновага моментів.
З цього програшу подій – висновок: кожному значенню моменту опору відповідає певна швидкість обертання ротора.
Швидкість обертання ротора і магнітного поля неоднакові. Ступінь відставання швидкості обертання ротору n від швидкості обертання магнітного поля n 0 оцінюється величиною ковзання
 звідки
звідки 
При зміні швидкості обертання ротора n = 0 ¸ n 0 ковзання змінюється S = 1¸0.
Розглянута модель механізму – не є двигуном.
В асинхронному двигуні магнітне поле, що обертається утворюється електричним шляхом нерухомими обмотками, що живляться трифазним струмом.
Магнітне поле, що обертається


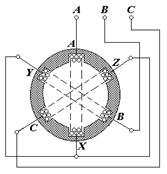
Статор асинхронної машини уявляє собою циліндр, зібраний з листової сталі з пазами на внутрішній поверхні. В діаметрально протилежних пазах A–X, B–Y¸ C–Z розташовані витки котушок з однаковим числом витків. Кут між площинами котушок складає 120°. Початки котушок A, B, C приєднані до мережі трифазного струму частотою f 1, а кінці X, Y, Z об’єднані в загальну нульову точку. В обмотках котушок протікають синусоїдальні струми І А, І В, І С, взаємно зсунуті по фазі на третину періоду. Кожна котушка окремо створює пульсуючий магнітний потік, вісь якого співпадає з віссю відповідної котушки.
Можна показати, що три пульсуючі потоки утворюють спільне магнітне поле, незмінне за величиною і, що обертається з постійною швидкістю відносно нерухомих катушок.
Так на малюнках (а), (б), (в) показані утворення сумарних магнітних потоків Ф = S j =` j A + ` j B + ` j C для трьох послідовних моментів часу t 1, t 2, t 3. Величини векторів j A, j B, j C взяті з графіку зміни магнітних індукцій в часі. Оскільки магнітний потік Ф пропорційний струму, що його утворює (за законом Ома для магнітних кіл Ф = Iw / R м), то графіки зміни магнітних потоків збігаються у відповідному масштабі з графіками зміни струмів в фазних обмотках A–X, B–Y, C–Z.
Сумарне магнітне поле обертається в площині осей катушок з кутовою швидкістю w, тобто повний оберт вектор магнітної індукції здійснить за один період зміни струму в катушці. Воно послідовно співпадає за напрямком з віссю тієї з фазних обмоток, струм в якій досягає максимального значення. Тобто магнітне поле обертається в напрямку послідовності фаз трифазної системи струмів в фазних обмотках.
Наслідок: щоб змінити напрямок обертання магнітного поля достатньо змінити порядок підключення двох (із трьох) фазних обмоток.
Отже трифазна симетрична система струмів збуджує магнітне поле з однією парою полюсів, тобто двополюсне магнітне поле, що обертається. Його вісь повертається на 360°, тобто здійснює один оберт за час одного періоду зміни струму. Звідки, частота обертання n 0 двополюсного поля дорівнює за величиною частоті f 1 струмів в обмотці статора.
За історичною традицією частоту обертання прийнято визначати числом обертів n 0 за хвилину n 0 = 60× n 0 = 60× f 1.
Враховуючи, що n 0 = f 1, кутова швидкість обертання двополюсного поля W0 = 2p n 0 = 2p f 1 = w [радіан / сек.].
Отже, кутова швидкість обертання двополюсного магнітного поля за величиною дорівнює кутовій частоті струмів в обмотках статора.
В багатополюсній обмотці статора кожній парі полюсів поля, що обертається, відповідає трійка котушок для фазних обмоток. Звідки, якщо поле повинно мати р пар полюсів, то кожна з фазних обмоток статора повинна бути розділена на р частин. При цьому частота обертання магнітного поля складає n 1 = 60× f / р.
Режими роботи асинхронної машини
Режим роботи трифазної асинхронної машини визначається режимом електро–магнітної взаємодії струмів в обмотках статора і ротора. В залежності від значення ковзання трифазна асинхронна машина може працювати в одному з трьох режимів двигуна, генератора і електромагнітного гальма.


В режимі двигуна (0 < S < 1) трифазна асинхронна машина є перетворювачем електричної енергії в механічну. Ротор двигуна повинен обертатись асинхронно повільніше поля, з такою частотою обертання, при якій струми в обмотці ротора утворюють обертаючий момент, що врівноважує гальмуючий момент від тертя і навантаження на валу.
В режимі генератора S < 0 – швидкість обертання ротора більша за швидкість обертання поля.
В режимі електромагнітного гальма напрямки обертання ротора і магнітного поля протилежні.
Конструкція ротора
Асинхронні машини в основному відрізняються будовою ротора.
В більшості двигунів використовується короткозамкнутий ротор. Цей ротор дешевший і, що суттєво, обслуговування двигуна з таким ротором простіше. Конструкція – “біляче колесо” – була вже розглянута.
 Обмотки фазного ротора або ротора з контактними кільцями виконуються з ізольованого проводу. В більшості випадків обмотка трифазна з тим же числом котушок, що і обмотка статора. Три фазні обмотки ротора з’єднані на самому роторі «зіркою», а вільні їх кінці приєднані до трьох контактних кілець, укріплених на валу і електрично ізольованих від нього. Через кільця і струмоз’ємні щітки обмотки ротора замикаються на трифазний реостат.
Обмотки фазного ротора або ротора з контактними кільцями виконуються з ізольованого проводу. В більшості випадків обмотка трифазна з тим же числом котушок, що і обмотка статора. Три фазні обмотки ротора з’єднані на самому роторі «зіркою», а вільні їх кінці приєднані до трьох контактних кілець, укріплених на валу і електрично ізольованих від нього. Через кільця і струмоз’ємні щітки обмотки ротора замикаються на трифазний реостат.
Обмотка статора включається безпосередньо в трифазну мережу. Включення реостату в коло ротора дає можливість суттєво покращити пускові умови для двигуна – зменшити пусковий струм і збільшити початковий (пусковий) обертаючий момент. Крім того, за допомогою реостату, включеного в коло ротора, можна плавно регулювати швидкість двигуна.
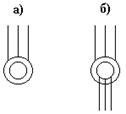 Умовні позначення асинхронних машин з короткозамкнутим (а) і фазним (б) роторами на принципових та електричних схемах.
Умовні позначення асинхронних машин з короткозамкнутим (а) і фазним (б) роторами на принципових та електричних схемах.
Механічні характеристики асинхронного двигуна
 З принципу роботи двигуна стає очевидно, обертаючий момент двигуна М при незмінній швидкості обертання магнітного поля цілком залежить тільки від ковзання S, або від швидкості обертання ротора n,оскільки
З принципу роботи двигуна стає очевидно, обертаючий момент двигуна М при незмінній швидкості обертання магнітного поля цілком залежить тільки від ковзання S, або від швидкості обертання ротора n,оскільки  . Задаючи різні значення S в межах 0 ¸ 1 можна побудувати графік залежності обертаючого моменту М від S або М від n. Залежність М (S) і М (n) мають назву механічні характеристики асинхронного двигуна.
. Задаючи різні значення S в межах 0 ¸ 1 можна побудувати графік залежності обертаючого моменту М від S або М від n. Залежність М (S) і М (n) мають назву механічні характеристики асинхронного двигуна.
На характеристиці можна відмітити:
· максимальний або критичний момент М к;
· пусковий момент М пуск (при пуску двигуна, тобто при S = 1 або n = 0);
· номінальний момент М н, що відповідає номінальному режиму роботи двигуна (йому відповідає номінальна частота обертання ротора n ном, що вказується в паспорті двигуна).
Щоб двигун почав обертатись під навантаженням, необхідно, щоб його пусковий момент був більшим за гальмуючий пусковий момент механізму, на який працює двигун. Двигун розганяється у відповідності з механічною характеристикою: розгін починається з точки с, потім проходиться точка б і двигун опиняється в сталому режимі, тобто обертається з частотою n на ділянці а – б в точці, що відповідає умові М = М г (де М г – гальмуючий момент). Отже, ділянка б – с відповідає розгону, а ділянка а – б – робочому режиму, на якій при зміні обертаючого моменту М від 0 до М к частота обертання двигуна змінюється мало.
Стійка робота двигуна, тобто робота при n» const, можлива тільки на ділянці а – б. Як це було показано раніше, – як би не змінювався гальмуючий момент, в межах ділянки а – б двигун може так змінити обертаючий момент, що умова його стійкої роботи завжди зберігається. В цьому полягає властивість внутрішнього саморегулювання асинхронного двигуна.
Коли гальмуючий момент стає рівним максимальному (критичному), обертаючий момент почне зменшуватись і рівність М = М г стає неможливою.
 По значенню відношення М к / М ном = g можнасудитипро перевантажувальну здатність двигуна. В асинхронних двигунах g = 1,7 ¸ 2,5.
По значенню відношення М к / М ном = g можнасудитипро перевантажувальну здатність двигуна. В асинхронних двигунах g = 1,7 ¸ 2,5.
Двигуну з фазним ротором відповідає родина механічних характеристик.
Звичайно робота двигуна відповідає залежності з R p = 0. Ця характеристика аналогічна характеристиці двигуна з короткозамкнутим ротором і має назву природня.
Якщо трифазний реостат в колі ротора вивести на максимальний опір, то можна збільшити пусковий момент, а потім, зменшуючи опір реостату до нуля, вивести двигун в найбільш сприятливий режим.
Механічні характеристики, що отримані при введені реостату в коло фазного ротора, називається реостатними.
Обертаючий момент і ковзання, що відповідають роботі двигуна при повному навантаженні, називаються номінальним моментом М н і номінальним ковзанням S н.
Баланс активних потужностей асинхронного двигуна
Баланс активних потужностей асинхронного двигуна можна уявити таким рівнянням
Р е = D Р 1е + D Р м + D Р 2е + Р мех = D Р 1е + D Р м + D Р 2е + D Р мех + Р.
Тут:
§ Р е = 3 U 1 × I 1×cos j 1 – потужність, що споживається двигуном з мережі;
§ D Р 1е = 3 I 12 R 1 – електричні втрати в обмотці статора (втрати в міді);
§ D Р м – магнітні втрати в сталі статора;
Магнітні втрати в роторі пропорційні частоті f 2, дуже малі і ними нехтують.
§ D Р 2е = 3 I 22 R 2 – електричні втрати в обмотці ротора (втрати в міді);
§ Р мех – повна механічна потужність, що розвивається двигуном;
§ D Р мех – механічні втрати в двигуні;
§ Р – корисна потужність на валу двигуна.
Корисна механічна потужність двигуна Р менша за потужність Р мех на величину механічних втрат в двигуні: Р = Р мех – D Р мех.
Величина Ре м = Ре – DР1е – DРм уявляє собою електромагнітну потужність двигуна, що передається від статора до ротору через обертове магнітне поле.
В заводському паспорті, на щитку двигуна і в каталогах вказується не споживана з мережи електрична потужність Р е, а корисна механічна потужність Р н на валу двигуна при номінальному режимі роботи.
Асинхронний лінійний двигун (ЛАД)
Лінійний електродвигун винайшов в 1902 р. англійський інженер Трамбета. В ЛАД електроенергія перетворюється безпосередньо в механічну енергію прямолінійного переміщення робочого органу машин і механізмів. В цих агрегатах відсутня громіздка проміжна механічна ланка, що перетворює обертовий рух в поступовий. Крім того, ці двигуни бесконтактні, тобто без механічних зв’язків між статором і вторинним елементом двигуна.
ЛАД використовуються в крнвейєрних лініях, в виконавчих елементах автоматики, у високошвидкісному надземному електротранспорті (швидкість понад 400–500 км/год.) в тому числі поїздів монорейкових естакадних шляхів на повітряній подушці або магнітній підвісці. (Один з випробувальних полігонів вагонів таких поїздів був розташований на березі Київського водосховища.
ЛАД має такі ж конструктивні елементи як і звичайний асинхронний двигун, але дещо видозмінені. Поперечний перетин внутрішньої поверхні статора такого двигуна – прямолінійний, а не круговий. Такий статор можна уявити, якщо подумки розрізати статор звичайного асинхронного двигуна по радіусу і розгорнути на площині. В пазах такого статора розміщується трифазна обмотка. Вторинний елемент – також «пласка» конструкція  (уявно отримана з розгорнутого ротора асинхронного двигуна).
(уявно отримана з розгорнутого ротора асинхронного двигуна).
При підключенні обмотки статора до мережі трифазної напруги трифазна система струмів утворює магнітний потік, який рухається вздовж статора. Цей магнітний потік, що рухається, індукує в обмотці вторинного елемента ЕРС, під дією якої в ній виникає струм. Взаємодія струму з магнітним потоком, що рухається, утворює силу, яка спрямована в бік руху магнітного потоку і діє на вторинний елемент. Під дією цієї сили вторинний елемент почне переміщуватись в сторону розповсюдження магнітного потоку з деяким відставанням (ковзанням) від нього.
Однофазний асинхронний двигун
На статорі однофазного асинхронного двигуна розташована одна обмотка. Ротор двигуна має короткозамкнуту обмотку. Протікаючий по обмотці статора змінний струм утворює пульсуючий магнітний потік, що змінює свій напрямок з частотою напруги мережі. Напрямок цього потоку постійний в часі і його значення в часі змінюється за синусоїдальним законом.

Пульсуючий магнітний потік можна уявити як результат складання двох рівних за величиною потоків, що обертаються з однаковою частотою, але в протилежних напрямках. Для кожного моменту часу векторна сума потоків, що обертаються, дорівнює пульсуючому магнітному потоку.
nI = nII = n1 – оберти магнітних потоків; n2 – оберти ротора.
При нерухомому роторі ці потоки (Ф І і Ф ІІ) утворюють обертаючі моменти, напрямки яких, як вже нам відомо, співпадають з напрямком обертання магнітних потоків. Тобто потоки Ф І і Ф ІІ утворюють рівні, але протилежні за напрямком обертаючі моменти, в результаті чого ротор не може зрушити з місця. Якщо ротор обертати зовнішнім зусиллям в напрямку обертання потоку Ф І, то потік Ф І буде прямим, а потік Ф ІІ зворотним до ротора. При цьому ковзання ротора по відношенню до потоків Ф І і Ф ІІ стає різним. Ковзання по відношенню до прямого потоку S I = (n I – n 2) / n I = (n1 – n 2) / n 1, а ковзання по відношенню до зворотного потоку S IІ = (n IІ + n 2) / n IІ = (n 1 + n 2) / n 1 = [ n 1 + n 1(1 – S I)] / n 1 = 2 – S I.
При пуску двигуна S І = 1 і S ІІ = 1. Якщо S І = 0, то S ІІ = 2, а якщо S І = 2, то S ІІ = 0.
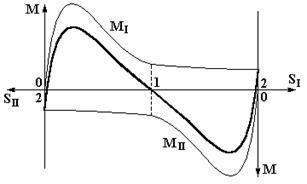 |
За залежностями М І(S I) i M II(S II) можна побудувати сумарний обертаючий момент M (S)
З цієї залежності можна побачити, що при S І = S ІІ = 1 обертаючий момент М = 0. При зменшенні ковзання S І двигун розвиває обертаючий момент, направлений в сторону обертання потоку Ф 1; при зменшенні ковзання S ІІ (S ІІ < 1) – в сторону обертання потоку Ф ІІ: отже, якщо якось привести ротор до обертання, то виникає момент М > 0, який буде підтримувати це обертання.
 Для утворення початкового обертаючого моменту (для пуску двигуна) використовують спеціальну пускову обмотку (ПО), розташовану на статорі під кутом 90° до робочої. Послідовно з пусковою обмоткою включений конденсатор С, завдяки якому струм в цій обмотці випереджує за фазою напругу в мережі на деякий кут.
Для утворення початкового обертаючого моменту (для пуску двигуна) використовують спеціальну пускову обмотку (ПО), розташовану на статорі під кутом 90° до робочої. Послідовно з пусковою обмоткою включений конденсатор С, завдяки якому струм в цій обмотці випереджує за фазою напругу в мережі на деякий кут.
Використання пускової обмотки забезпечує виконання двох необхідних умов отримання магнітного потоку, що обертається (зсув обмоток статора в просторі і зсув струмів в обмотках на деякий кут). Після розгону пускова обмотка відключається.
Контрольні запитання
1. Принцип дії асинхронної машини.
2. Поясніть принцип виникнення магнітного обертового поля та значення його у роботі асинхронної машини.
3. Режими роботи асинхронної машини.
4. Конструкція ротора
5. Механічні характеристики асинхронного двигуна.
6. Баланс активних потужностей асинхронного двигуна.
7. Асинхронний лінійний двигун (ЛАД).
8. Поясніть будову та принцип дії однофазного асинхронного двигуна.

