




Вхідний контроль:
1 Перерахуйте підсистеми МПС.
2 Наведіть приклади об’єктів автоматичного контролю й управління.
3 Які пристрої введення та відображення інформації можуть використовуватись у керувальній МПС?
МПС будується за принципами “трьох М” – модульності, магістральності та мікропрограмованості. Модулем називається функціонально, електрично та конструктивно завершений цифровий пристрій, який призначено для виконання задач певного типу: процесорний модуль, модуль пам’яті тощо. Модульний підхід спрощує процес проектування МПС, орієнтованих на конкретні області використання, тобто найбільш ефективні, надійні, економічні.
Магістральний спосіб обміну інформацією в МПС реалізується у вигляді шинної організації, яка здійснює зв’язки між підсистемами МПС шинами (електричними лініями). Магістральність забезпечує регулярність структури МПС, можливість масштабування, змінення конфігурації, мінімізує кількість зв’язків між окремими пристроями. Зазвичай більшість універсальних мікропроцесорів забезпечують при побудові МПС тришинну організацію за допомогою шин адреси (ША), шини даних (ШД) та шини керування (ШК), які утворюють системну шину.
Мікропрограмне керування може забезпечити найбільшу гнучкість у застосуванні МПС, але частіше використовують командний рівень керування через складність мікропрограмування.
Підсистеми МПС можуть складатися з кількох модулів мікропроцесорів, пам’яті, пристроїв введення-виведення.
Незважаючи на різномаїття МПС різного призначення, усі вони мають подібну структуру й однотипний склад устаткування. Їх характерною рисою є наявність розвиненої периферії або зовнішніх пристроїв: блоків датчиків, блоків керування, комутаторів, пристроїв введення та відображення інформації, наприклад, клавіатура, монітор. Зовнішні пристрої підключаються до системної шини МПС за допомогою її підсистеми введення-виведення за допомогою інтерфейса. На рис. 1.6 показана структурна схема МПС автоматичного контролю і керування технологічним процесом. До її складу входять блок датчиків Д1…Д m, власне МПС та блок керування К1...К p. Датчики слугують для вимірювання параметрів стану об’єкта автоматичного контроля та управління і можуть бути, як аналоговими (Д1…Д n), так і цифровими (Д n +1…Д m). Аналогові та цифрові сигнали з датчиків підключаються до входів МПС за допомогою комутатора 1, після якого, у разі необхідності, ставиться АЦП.
МПС за заданими алгоритмами обробляє дані про стан процесу і видає цифрові керувальні сигнали через АЦП, якщо це потрібно, на блок керування К1...К p. Підключення керувальних сигналів до блока керування здійснюється за допомогою комутатора 2. МПС може бути побудована на комп’ютерах та мікроконтролерах.
Блок керування може складатись з формувачів аналогових сигналів К1...К n або цифрових сигналів К n +1...К p керування.
Керувальна МПС функціонує таким чином. Комутатор, керований МПС, опитує датчики за адресами, які задаються програмою, й інформація у цифровій формі надходить до МПС. На основі цієї інформації відповідно до програми роботи МПС формується модель стану об’єкта і видається інформація на пристрій відображення для оператора або на виконавчий механізм, наприклад, переключення ліній зв’язку тощо. Таймер формує відліки часу, мітки, які прив’язують процес до внутрішнього часу МПС. Датчик переривань забезпечує переривання поточної програми, наприклад, при виникненні аварійних ситуацій і перехід до програм їхнього оброблення.
Обмін даними між МПС та зовнішніми пристроями може реалізовуватись трьома способами: програмно керованим, за перериваннями та прямим доступом до пам’яті.
Програмно керований спосіб обміну даними ініціюється будь-яким процесором МПС за основною програмою, яка вміщує команди введення-виведення. Перед обміном процесор перевіряє готовність до роботи зовнішніх пристроїв. Цей спосіб є простий, але не забезпечує термінову реакцію МП на готовність зовнішніх пристроїв до обміну. Відповідно, такий програмно керований спосіб використовується при роботі з повільно діючими різнорідними пристроями.
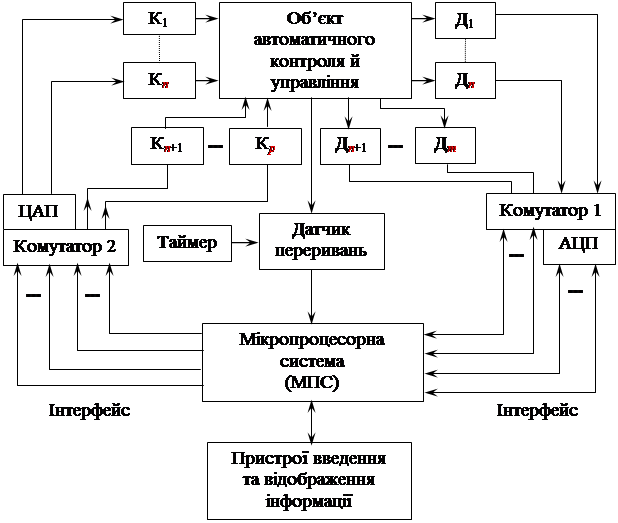 |
Рисунок 1.6 – Структурна схема МПС автоматичного контролю та управління технологічним процесом
При роботі з асинхронно, по відношенню до процесора, діючими пристроями доцільним є спосіб обміну за перериваннями. Зовнішній пристрій, коли він готовий до роботи, посилає сигнал INT – запит на переривання (від Interrupt – переривання) на відповідний вхід процесора. За цим сигналом, якщо переривання дозволені, процесор припиняє виконання поточної програми, посилає пристрою сигнал підтвердження INTA (від Interrupt Acknowledge – підтвердження переривання) і переходить до виконання підпрограми обслуговування переривання від даного пристрою. Метод переривань забезпечує швидку реакцію МПС на запити зовнішніх пристроїв, але також здійснює програмно керований обмін і потребує значної кількості команд на пересилання одного байта даних, оскільки обмін відбувається через процесор.
Найбільш високу швидкодію обміну забезпечує режим прямого доступу до пам’яті ПДП (DMA – Direct Memory Access) по каналу зовнішній пристрій-пам’ять. По запиту захоплення шин HOLD (від Hold – захоплення) від зовнішнього пристрою процесор завершує поточний машинний цикл виконуваної команди і переводить системні шини адреси, даних і керування у стан високого опору і видає сигнал підтвердження захоплення HLDA. Процесор відключається від процесу обміну даними і обмін відбувається з максимальною для всіх учасників обміну швидкістю. Режим ПДП забезпечується за допомогою програмованих контролерів ПДП, які адресують комірки пам’яті, рахують біти та врегульовують конфліктні ситуації, які можуть виникнути при одночасній роботі кількох пристроїв у режимі ПДП.
Як правило, МПС є вузькоспеціалізованою після її розробки та впровадження. Розробка МПС здійснюється стосовно конкретної задачі (алгоритму), як в апаратній частині, так і у програмному забезпеченні. Робоча програма після налаштування МПС завантажується у ПЗП одноразово. Змінення реалізуючого алгоритму потребує зміни апаратної та програмної частини МПС, що не є ефективно.
Слід зазначити, що вбудовані у пристрої керування МПС, які розробляються на мікроконтролерах, допускають багаторазове програмування ПЗП з занесенням різних робочих програм, тобто перепрофілювання.
Контрольні питання:
1 Яку роль відіграють АЦП та ЦАП у керувальній МПС?
2 З якою метою у керувальній МПС використовуються комутатори, датчики, керувальні блоки та таймер?
3 Назвіть основні етапи функціонування керувальної МПС.
4 Які вузли входять до складу підсистеми центрального процесорного елементу?
Контрольні питання підвищеної складності:
1 Яку роль відіграє датчик переривань?
2 Наведіть приклад режиму переривань у ПК.
3 Чим на Ваш погляд відрізняється МПС збирання даних від керувальної МПС?

