




За архітектурою обчислювальні системи поділяються на однорідні та неоднорідні.
Однорідні обчислювальні системи побудовані на базі однотипних комп’ютерів або процесорів. Вони використовують стандартні набори технічних, програмних засобів, стандартні протоколи сполучення пристроїв.
Неоднорідні обчислювальні системи мають у своєму складі різні типи комп’ютерів або процесорів, і при побудові такої системи треба враховувати їхні різні технічні та функціональні характеристики, що ускладнює їх створення та обслуговування. Прикладом неоднорідної інформаційно-обчислювальної системи є мережа Інтернет.
Обчислювальні системи працюють у двох режимах – оперативному та неоперативному.
Оперативні системи працюють у реальному масштабі часу, в них реалізується оперативний режим обміну інформацією – відповіді на запитання надходять негайно.
У неоперативних системах можливий режим затриманої відповіді, коли результати запиту можна отримати з затримкою.
Розрізняють обчислювальні системи з централізованим та децентралізованим керуванням. У першому випадку керування виконує окремий комп’ютер або процесор, у другому – кожний компонент може брати керування на себе і вони є рівноправні.
Обчислювальні системи можуть бути розподіленими територіально, зосередженими, структурно однорівневими, тобто мати один загальний рівень обробки даних, та багаторівневими, ієрархічними структурами; у ієрархічних структурах комп’ютери або процесори розподілені за різними рівнями оброблення інформації і кожний з них може ініціалізуватись для виконання певних функцій.
За способом організації оброблення даних багатопроцесорні системи можуть бути конвеєрними (магістральними), векторними або матричними.
У конвеєрних багатопроцесорних системах кожен процесор одночасно виконує різні операції над послідовним потоком оброблюваних даних. За прийнятою класифікацією такі системи є системами з множинним потоком команд та поодиноким потоком даних (МКПД) – Multiple Instruction Single Data, MISD. Структура MISD показана на рис. 1.1.
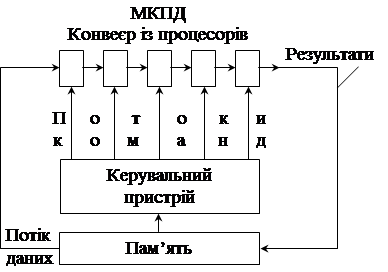
Рисунок 1.1 – Конвеєрна багатопроцесорна система
(множинний потік команд та поодинокий потік даних)
У векторних багатопроцесорних системах усі процесори одночасно виконують одну команду над різними даними – поодинокий потік команд з множинним потоком даних (ПКМД) – Single Instruction Multiple Data, SIMD. Структура SIMD показана на рис. 1.2. Принцип SIMD використовується також для підвищення продуктивності мікропроцесорів – суперскалярні (векторні) МП Pentium III, Pentium 4, Power PC тощо.
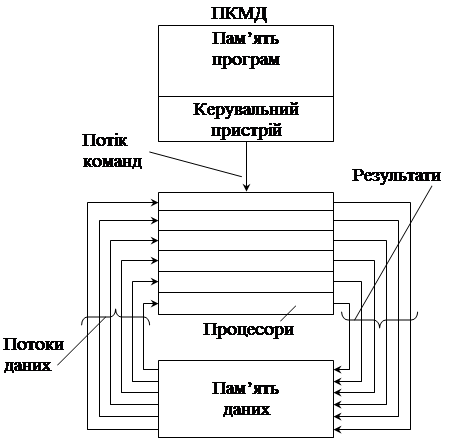 |
Рисунок 1.2 – Векторна багатопроцесорна система
(поодинокий потік команд та множинний потік даних)
У матричних багатопроцесорних системах кожний мікропроцесор одночасно виконує різні операції над послідовними потоками оброблюваних даних – множинний потік команд з множинним потоком даних (МКМД) – Multiple Instruction Multiple Data, MIMD. Структура MIMD показана на рис. 1.3.
Структура однопроцесорної системи (ПКПД) – Single Instruction Single Data, SISD показана на рис. 1.4.
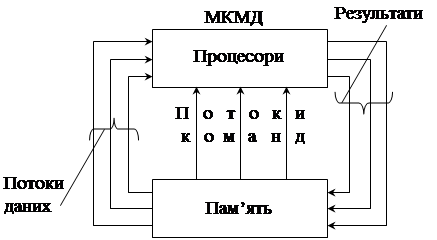 |
Рисунок 1.3 – Матрична багатопроцесорна система
(множинні потоки команд та даних)
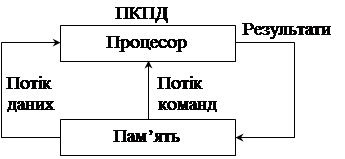 |
Рисунок 1.4 – Однопроцесорна система
(поодинокі потоки команд та даних)
Контрольні питання:
1 Що є архітектурою обчислювальних систем?
2 Які режими роботи обчислювальних систем Ви знаєте?
3 Які різновиди багатопроцесорних систем Ви знаєте?
Контрольні питання підвищеної складності:
1 За яким принципом працює конвеєрна багатопроцесорна система?
2 За яким принципом працює векторна багатопроцесорна система?
3 За яким принципом працює матрична багатопроцесорна система?
1.2.2 Класифікація комп’ютерів (Для поглибленого вивчення)
Комп’ютери можна класифікувати за багатьма ознаками, що призводить іноді до різного тлумачення термінів.
За призначенням комп’ютери можна поділити на універсальні, проблемно-орієнтовані та спеціалізовані.
Універсальні комп’ютери використовують для розв’язання задач, які характеризуються складністю алгоритмів, великим обсягом оброблюваної інформації та вимагають високої продуктивності обчислювальних засобів. Це задачі математичні, інженерно-технічні, інформаційні, космічної галузі тощо.
Проблемно-орієнтовані комп`ютери призначені для керування телекомунікаційними пристроями, роботами, різними технологічними процесами і потребують меншої продуктивності та обчислювальних ресурсів. До них можна віднести робочі станції, які призначені для виконання графічних, інженерних, проектувальних, видавницьких робіт тощо.
Спеціалізовані комп’ютери призначені для керування простими технічними пристроями, процесами, використовуються для спрощення та узгодження роботи вузлів обчислювальних систем.
За розміром і обчислювальною потужністю комп’ютери можна поділити на суперкомп’ютери, великі, малі, мікрокомп’ютери.
Суперкомп’ютери призначені для розв’язання задач керування складними оборонними комплексами, моделювання екологічних систем, прогнозування погоди тощо.
Великі комп’ютери часто називають також майнфреймами. Вони призначені для розв’язання науково-технічних задач, роботи з великими базами даних, керування мережами та їхніми ресурсами.
Малі комп’ютери орієнтовані на використання у керувальних обчислювальних комплексах, системах автоматизованого проектування, моделювання та штучного інтелекту.
Мікрокомп’ютери можна поділити на багатокористувацькі, які оздоблені кількома відеотерміналами, та персональні комп’ютери, однокористувацькі, які задовольняють вимоги універсальності використання.
Структурна схема персонального комп’ютера показана на рис. 1.5.
Мікропроцесор є центральним блоком персонального комп’ютера. Він призначений для керування роботою усіх блоків ПК та виконання арифметичних і логічних операцій над даними.
До складу мікропроцесора входять:
1 Арифметично-логічний пристрій (АЛП), який призначений для виконання усіх арифметичних та логічних операцій над числовими та символьними даними. У деяких моделях ПК для прискорення виконання операцій до АЛП підключається додатковий математичний співпроцесор.
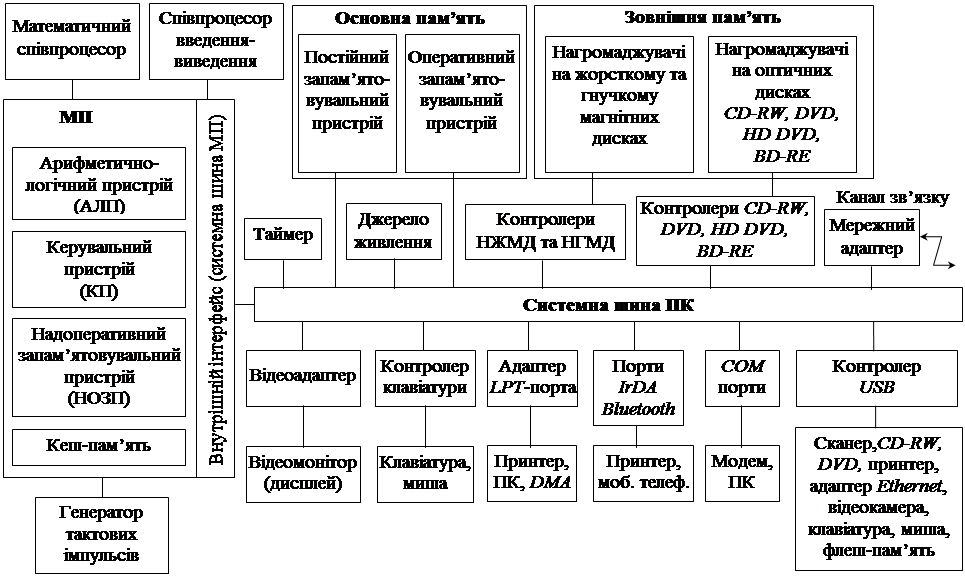 |
Рисунок 1.5 – Структурна схема ПК
2 Керувальний пристрій (КП) формує та подає на всі блоки ПК у визначені моменти часу певні сигнали керування, які обумовлені специфікою виконуваної операції і результатами попередніх операцій; формує адреси пам’яті і передає їх до відповідних пристроїв та вузлів комп’ютера; опорну послідовність імпульсів керувальний пристрій отримує від генератора тактових імпульсів.
3 Надоперативний запам’ятовувальний пристрій (НОЗП) призначений для короткочасного зберігання, записування та видавання інформації безпосередньо у найближчі такти роботи мікропроцесора. НОЗП побудований на регістрах.
4 Кеш-пам’ять команд та даних – це буферна пам’ять між мікропроцесором та оперативним запам’ятовувальним пристроєм або мікропроцесором та зовнішніми нагромаджувачами.
5 Інтерфейсна система мікропроцесора призначена для сполучення та зв’язку з іншими пристроями ПК; вона вміщує внутрішній інтерфейс мікропроцесора, буферні запам’ятовувальні регістри і схеми керування портами введення-виведення та системною шиною ПК.
6 Порт введення-виведення (I/O port) – це апаратура сполучення, яка дозволяє підключати до мікропроцесора інший пристрій ПК або периферійні пристрої.
7 Генератор тактових імпульсів генерує послідовність електричних імпульсів, частота яких визначає тактову частоту ПК. Частота генератора тактових імпульсів є однією з основних характеристик ПК і значною мірою визначає його продуктивність; кожна операція у ПК виконується за фіксовану кількість тактів.
Системна шина – це основна інтерфейсна система комп’ютера, яка забезпечує сполучення та зв’язок усіх його вузлів між собою.
Системна шина має у своєму складі:
− шину даних (ШД), яка створюється зі з’єднувальних ліній та схем сполучення для паралельного передавання усіх розрядів числового коду операнда;
− шину адреси (ША), яка вміщує з’єднувальні лінії та схеми сполучення для паралельного передавання коду адреси комірок основної пам’яті та порту введення-виведення зовнішнього пристрою;
− шину керування (ШК), яка складається зі з’єднувальних ліній та схем сполучення для передавання керувальних сигналів в усі блоки ПК;
− шину живлення, яка вміщує також з’єднувальні лінії та схеми сполучення для підключення блоків ПК до системи енергоживлення.
Системна шина забезпечує обмін даними між мікропроцесором та основною пам’яттю, між мікропроцесором та портами введення-виведення зовнішніх пристроїв, між основною пам’яттю та портами введення-виведення зовнішніх пристроїв у режимі прямого доступу до пам’яті.
Усі зовнішні пристрої ПК через їх порти введення-виведення підключаються до системної шини або безпосередньо, або через контролери (адаптери). Керування системною шиною ПК здійснюється частіш за все через додаткову мікросхему – контролер шини, який формує основні сигнали керування.
Основна пам’ять призначена для керування та оперативного обміну інформацією з іншими блоками ПК. Основна пам’ять складається з постійного (ПЗП) та оперативного (ОЗП) запам’ятовувальних пристроїв:
− ПЗП (ROM – Read Only Memory) призначений для зберігання програмної та довідкової інформації, яка не змінюється; дозволяє тільки зчитувати інформацію, яка в ньому зберігається;
− ОЗП (RAM – Random Access Memory) динамічного та статичного типу призначений для оперативного записування, зберігання та зчитування інформації (програм та даних), які безпосередньо беруть участь в інформаційно-обчислювальному процесі.
Вимогами до оперативної пам’яті є її висока швидкодія та можливість доступу до будь-якої комірки пам’яті окремо. ОЗП є енергозалежною.
Крім основної пам’яті у ПК є енергонезалежна пам’ять CMOS RAM (Complementary Metall-Oxide Semiconductor RAM), яка живиться від свого акумулятора; у ній зберігається інформація про апаратну конфігурацію ПК, яка перевіряється при кожному включенні ПК.
Зовнішня пам’ять є зовнішнім пристроєм ПК і використовується для зберігання усього програмного забезпечення ПК. Найбільш розповсюдженими видами зовнішньої пам’яті є нагромаджувачі на жорстких (НЖМД) та гнучких (НГМД) магнітних дисках, нагромаджувачі на оптичних дисках CD-ROM (Compact Disk Read Only Memory) та CD-RW (Re Writable CD), які дозволяють багаторазовий запис інформації.
У сучасних ПК для установлення програмного забезпечення, виконання певних додатків, наприклад, ігор, прослуховування музики, перегляду фільмів використовується DVD (Digital Versatile Disk) – універсальні цифрові диски, HD (High Density DVD) – диски DVD з високою щільністю запису на BD (Blu-ray Disk), які отримали таку назву від кольору променя лазера, який зчитує інформацію з диску.
Флеш (Flash) – пам’ять з багаторазовим електричним стиранням та записуванням інформації.
Призначення зовнішніх нагромаджувачів – зберігання великих обсягів інформації, записування та видавання її по запиту в ОЗП. Зовнішня пам’ять є енергонезалежною.
Джерело живлення – це блок автономного та мережного енергоживлення.
Таймер – вбудований у ПК електронний годинник реального часу, який дозволяє автоматично видавати поточний момент часу (рік, місяць, години, хвилини, секунди та частки секунд). Таймер підключається до автономного джерела живлення – акумулятора, і при відімкнені ПК від мережі продовжує працювати.
Зовнішні пристрої (ЗП) ПК забезпечують його взаємодію з зовнішнім інформаційним середовищем: користувачами, об’єктами керування, іншими комп’ютерами тощо.
До зовнішніх пристроїв відносяться:
− зовнішня пам’ять ПК;
− пристрої введення інформації;
− пристрої виведення інформації;
− діалогові засоби користувача;
− засоби зв’язку та телекомунікацій.
До пристроїв введення інформації відносяться:
− клавіатура;
− сканери;
− миша тощо.
До пристроїв виведення інформації відносяться:
− принтери;
− графобудувачі тощо.
LPT -порт (Line Printer Terminal) було введено у ПК для підключення принтера, але у розширеному режимі він може використовуватись як двоспрямований порт обміну даними і, як порт прямого доступу до пам’яті ПДП.
Контролер USB (Universal Serial Bus) дозволяє підключення до універсальної послідовної шини Flach -пам’яті, цифрових телевізійних камер, 10-Мбіт адаптерів Ethernet, багатопортових конверторів (USB to COM/USB-to-LBT), ноутбуків, клавіатур, цифрових фотоапаратів, CD-ROM, CD-RW, цифрових відеокамер тощо.
Деякі периферійні пристрої, найчастіше принтери, можуть мати безпроводове з’єднання з ПК через інфрачервоний послідовний порт IrDA (Infrared Data Assotiation).
Радіоінтерфейс Bluetooth використовується для передавання інформації на невеликі відстані між ПК, їх периферійними пристроями, мобільними телефонами тощо.
Пристрої зв’язку та телекомунікацій використовуються для зв’язку з приладами та іншими засобами автоматизації (цифро-аналогові та аналого-цифрові перетворювачі, адаптери тощо), а також для підключення ПК до каналів зв’язку з метою обміну інформацією по мережі, у складі обчислювальних систем (мережні інтерфейсні плати та карти, модеми, мультиплексори передавання даних).
До діалогових засобів відносяться відеотермінал, керований відеокартою, та пристрої мовного введення-виведення інформації (мікрофони та акустичні системи), керовані звуковою картою. До засобів мультимедіа відносяться мікрофони, відеокамери, акустичні та відеосистеми тощо.
Математичний співпроцесор використовується для виконання операцій над двійковими числами з фіксованою та плаваючою точками, для обчислення трансцендентних, у тому числі тригонометричних функцій. Співпроцесор працює паралельно з основним мікропроцесором, що значно прискорює виконання операцій. Сучасні моделі мікропроцесорів часто інтегрують співпроцесор до своєї структури.
Співпроцесор введення-виведення працює паралельно з мікропроцесором і обслуговує кілька зовнішніх пристроїв (відеотермінал, принтер, НЖМД, НГМД тощо) та звільняє процесор від оброблення процедур введення-виведення, у тому числі реалізує режим прямого доступу до пам’яті.
Контролер прямого доступу до пам’яті (DMA – Direct Memory Access) забезпечує обмін між зовнішніми пристроями та оперативною пам’яттю без участі мікропроцесора, що підвищує ефективність роботи ПК у цілому. Процесор під час обміну даними між зовнішніми пристроями та оперативною пам’яттю може обробляти інші дані або навіть вирішувати іншу задачу.
Контролер переривань обслуговує запити переривань від зовнішніх пристроїв за допомогою процедур переривань. Контролер приймає запит, визначає пріоритет цього запиту та визначає права конкретного зовнішнього пристрою на його обслуговування. Він посилає у мікропроцесор сигнал переривання та повідомляє його про номер або адресу обслуговуваного пристрою або про адресу першої команди підпрограми оброблення цього запиту. Мікропроцесор призупиняє виконання поточної програми та виконує підпрограму обслуговування переривання. Після завершення підпрограми мікропроцесор повертається до виконання перерваної програми.
Контролер переривань є програмований. Режим переривань використовується у ПК постійно, усі процедури введення-виведення виконуються за запитами зовнішніх пристроїв на переривання. Системний таймер здійснює переключення задач, вирішуваних на ПК у багатозадачному режимі, кожні 2 мс.
Слід зазначити особливості термінології щодо комп’ютерів, об’єднаних в обчислювальні та інформаційні мережі.
Використання комп’ютерів у мережах визначається їх програмним забезпеченням та установленим додатковим устаткуванням.
Мережні комп’ютери – це спрощені мікрокомп’ютери, які забезпечують роботу у мережі та доступ до мережних ресурсів. Вони часто оснащені відеотерміналом, клавіатурою, а іноді не мають навіть жорсткого диску. Такі комп’ютери можуть спеціалізуватись на виконанні певних робіт: захисту мережі від несанкціонованого доступу, перегляду мережних ресурсів, організації електронної пошти тощо.
Робочі станції у мережах – це персональні комп’ютери, які об’єднані у мережу і є вузлами цієї мережі.
Сервер – це багатокористувацький потужний мікрокомп’ютер, призначений для оброблення запитів від усіх робочих станцій мережі.
Проксі-сервер – це робоча станція, на якій установлено спеціалізоване програмне забезпечення для безпосереднього зв’язку локальних мереж з Інтернет.
Наведена термінологія складалась протягом кількох десятків років і відображає стани розвитку обчислювальних систем та мереж на базі електронних обчислювальних машин (ЕОМ). Розвиток потужних мікропроцесорів призвів до того, що в інформаційних та телекомунікаційних мережах як кінцеві вузли найчастіше використовуються персональні комп’ютери. Для розв’язування складних задач керування та моделювання актуальним є застосування великих та суперкомп’ютерів.
Найбільш перспективною технологією побудови великих та суперкомп’ютерів є кластерні обчислювальні системи – групи високоефективних процесорів, об’єднаних у кластери. Їх перевагою є можливість гнучкого регулювання необхідної потужності системи шляхом підключення до кластера звичайних серійних серверів за допомогою спеціальних апаратних та програмних інтерфейсів. Кластерізація дозволяє маніпулювати групою серверів як одною системою, забезпечувати доступ будь-якого сервера до будь-якого блока оперативної та дискової пам’яті. Кластерні системи характеризуються спрощеним керуванням під операційними системами, наприклад, Windows 2000 Enterprise фірми Microsoft; її компонент Wolfpack забезпечує також функції діагностики збоїв та відновлення системи.
Створити високопродуктивні комп’ютери на одному мікропроцесорі неможливо через обмеження, зумовлені кінцевою швидкістю поширення електромагнітних хвиль (300 000 км/с), тому що час розповсюдження сигналу на відстань кілька міліметрів, яка складає розмір сторони МП при швидкодії 100 млрд. операцій за секунду, стає вже відповідним часу виконання однієї операції. Тому суперкомп’ютери створюються як високопаралельні системи.
У 2005 році Національна академія наук України створила в Інституті кібернетики ім. В.М. Глушкова (Київ) суперкомп’ютерний обчислювальний центр (СОЦ) на базі двох високопродуктивних кластерних систем СКІТ-1 та СКІТ-2 – 32-процесорного кластера на процесорах Intel Xeon та 64-процесорного – на процесорах Intel Itanium2.
Кластерна система СКІТ-1 (суперкомп’ютер для інформаційних технологій) – це 32-процесорний 16-вузловий кластер на основі 32-розрядних мікропроцесорів Intel Xeon, з піковою потужністю не менше 170 Гігафлопс (мільярдів операцій з плаваючою точкою за секунду) та можливістю підвищення продуктивності до 0,5-1 Терафлопс (трильйони операцій з плаваючою точкою за секунду). Кластер працює під керуванням головної операційної системи ALT Linux.
Система СКІТ-2 – це 64-процесорний 32-вузловий кластер на основі мікропроцесорів Intel Itanium2 з частотою 1,4 ГГц з розрядністю 64 біти і можливістю виконувати обчислення із 128 та 256-бітовою інформацією.
Пікова потужність кластера до 300 Гігафлопс з можливістю її підвищення до 2-2,5 Гігафлопс, підсистемою пам’яті 1 Гбайт і можливістю нарощування потужності до 10-15 Гбайт. Кластер працює під керуванням головної операційної системи Red Hat Enterprise.
Основними перевагами кластерних суперкомп’ютерних систем є:
− висока сумарна потужність;
− висока надійність системи;
− найкраще відношення потужність/вартість;
− можливість динамічного перерозподілу навантажень між серверами;
− легка масштабованість за рахунок підключення додаткових серверів;
− зручність керування та контролю роботи системи.
Суперкомп’ютери можуть мати також модифіковані структури – MMISD, паралельно-конвеєрна MISD -структура у суперкомп’ютері Ельбрус; MSIMD, паралельно-векторна модифікація, яка застосована у суперкомп’ютері Cray 2.
Слід зазначити, що багато ідей, втілених протягом десятків років у розроблених у різних країнах ЕОМ та комп’ютерах, знайшли застосування у сучасних мікропроцесорах.
Контрольні питання:
1 З яких вузлів складається мікропроцесор?
2 З яких вузлів складається ПК?
3 З якою метою будуються кластерні суперкомп’ютери?
4 Які сучасні операційні системи керують кластерними системами?
5 Які новітні розробки українських вчених в області суперкомп’ютерів Ви знаєте?
6 Яку потужність має сучасний суперкомп’ютер, розроблений українськими вченими?
7 Які переваги кластерних суперкомп’ютерних систем Ви знаєте?
8 Які параметри комп’ютера слід враховувати при його виборі?
Контрольні питання підвищеної складності:
1 На якій підставі може взаємодіяти персональний комп’ютер з периферійними пристроями через інфрачервоний послідовний порт?
2 На якій саме відстані може взаємодіяти мобільний телефон з ПК через радіоінтерфейс Bluetooth?

