




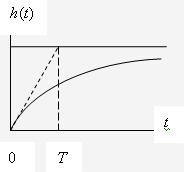
22.3 Define step response characteristic for the following control system (at zero initial conditions).
|
|


Motion equation:
 (9.9)
(9.9)

where
T Ц some constant (with time-base dimension)
K Ц amplification coefficient.
 (9.10)
(9.10)
Examples:
- a dc generator (motor) with independent excitation;
- RC contour.
Lecture 1.5a:
 (9.11)
(9.11)
 (9.12)
(9.12)
є23
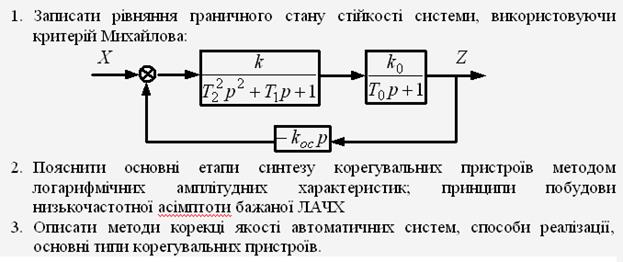
23.1Define the equations of the Mikhailov locus in order to define marginal stability for the following control system.
The open-loop transfer function:
The closed-loop transfer function:

The characteristic polynomial:



|

Stability condition may be obtained from the alternation of the roots:


Taking into account the condition  we have
we have
The condition of marginal stability:
є24
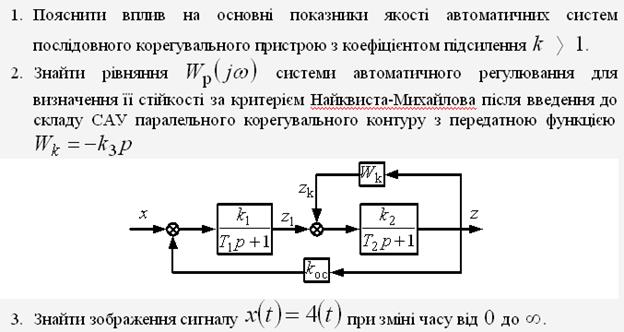
24.1Define the equations according to the Nyquist criterion in order to define the stability indicators for the following control system.

The open-loop transfer function:

To define the stability indicators of this control system itТs necessary to define the poles of the denominator and take into account the Nyquist stability criterion.

