




ТЮМЕНСКИЙ ГОСУДАРСТВЕННЫЙ НЕФТЕГАЗОВЫЙ УНИВЕРСИТЕТ
ИНСТИТУТ НЕФТИ И ГАЗА
Кафедра Кибернетических систем
Методы нахождения передаточных функций системы управления по заданной структурной схеме
Методические указания к лабораторной работе №1 по дисциплине «Теория автоматического управления» для студентов специальности 220201 – «Управление и информатика в технических системах» и направления 220200 – «Автоматизация и управление» (АиУбУИТС) всех форм обучения
Тюмень
2008
Утверждено редакционно-издательским советом государственного образовательного учреждения высшего профессионального образования «Тюменский государственный нефтегазовый университет»
Составитель: Васькевич А.В.
 |
© Государственное образовательное учреждение высшего
профессионального образования «Тюменский государственный
нефтегазовый университет», 2008
Введение
Дисциплина «Теория автоматического управления» имеет целью изучение теоретических основ и методов анализа и синтеза объектов и систем автоматического управления. Освоение изучаемого курса позволит будущим специалистам самостоятельно решать такие задачи, стоящие перед инженерами по автоматизации, как расчет и настройка контуров регулирования и управления сложных технических систем.
Для закрепления теоретического материала и приобретения практических навыков студенту предлагается выполнить курс лабораторных работ, предусматривающий как практические задания, посвященные изучению математического описания систем управления, различных типовых звеньев и их характеристик, так и инженерные задачи, связанные с детальным анализом систем управления и, при необходимости, синтезом систем с использованием различных математических пакетов, в том числе и пакета MATLAB.
Разработанные методические указания предназначены для закрепления знаний о способах представления и описания систем автоматического управления. Основной внимание уделяется изучению графического представления математической модели системы и способах перехода от графического представления к математическому.
Исходные данные для выполнения лабораторной работы приведены в конце методических указаний. Для облегчения выполнения работы в методических указаниях приведен пример расчета. С целью более глубокого изучения представленного материала студенту предлагается обратиться к учебным пособиям, список которых приведен в конце методических указаний.
Цель работы: для системы управления с заданной структурной схемой вычислить передаточную функцию тремя методами: 1) методом прогонки сигнала; 2) методом структурных преобразований; 3) методом Мейсона.
Краткие теоретические сведения
Опр. 1: Структурной схемой системы управления называют графическое представление ее математической модели в виде соединений звеньев с указанием входных и выходных сигналов [1].
Основными элементами структурной схемы являются: звено, узел, сумматор и элемент сравнения.
На структурной схеме звенья изображают в виде прямоугольников (рисунок 1 а), стрелками указывают пути прохождения сигнала в системе. Звено может иметь несколько входов и выходов, тогда рассматриваемую систему называют многомерной, если же на вход звена поступает один сигнал, и на выходе звена тоже один сигнал, то в таком случае систему называют одномерной.
Точки разветвления сигнала называют узлами (рисунок 1 б). По умолчанию суммирование сигналов осуществляется в сумматоре (рисунок 1 в,г,д), а вычитание – в элементе сравнения (рисунок 1 е,ж). Если на вход сумматора подается отрицательный сигнал, то он в сумматоре складывается с отрицательным знаком (рисунок 1 д).
Как видно из рисунка 1, элемент сравнения и сумматор на структурной схеме часто обозначаются одинаково, разница заключается в том, что они используются в разных типовых соединениях.
Звено на структурной схеме не обязательно изображает модель какого-либо отдельного элемента. Оно может быть моделью элемента, соединения элементов или вообще любой части системы.
| а | б | в | г | ||
|
|
| 
| ||
| д | е | ж | |||
|
|
|
| |||

Рисунок 1 – Элементы структурных схем
Звенья системы управления могут описываться различными способами [1], такими как:
- дифференциальным уравнением:
 ,
,
где  и
и  - входной и выходной сигналы звена соответственно,
- входной и выходной сигналы звена соответственно,
 - производная сигнала n-го порядка,
- производная сигнала n-го порядка,
 - производная сигнала m-го порядка,
- производная сигнала m-го порядка,
а условие  является условием физической реализуемости звена;
является условием физической реализуемости звена;
- дифференциальным уравнением в операторном виде:
 ,
,
где операция дифференцирования заменяется оператором p, т.е.  ;
;
- операторной передаточной функцией:
 ;
;
- передаточной функцией в изображениях Лапласа:
 ,
,
здесь  и
и  изображения Лапласа сигналов и , s – переменная преобразования Лапласа;
изображения Лапласа сигналов и , s – переменная преобразования Лапласа;
- статической характеристикой (рисунок 2).
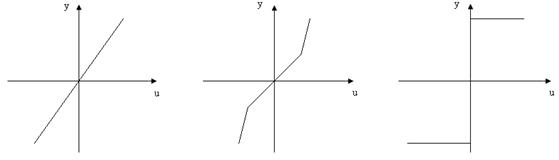
Рисунок 2 – Виды статических характеристик звеньев
Опр. 2: Статическая характеристика звена системы управления – зависимость выходного сигнала звена от входного сигнала в статическом режиме, представленная в графической форме [2].
Опр. 3: Передаточная функция звена – W(s) – отношение изображения по Лапласу выходного сигнала к изображению по Лапласу входного сигнала при нулевых начальных условиях.
В теории автоматического управления традиционным способом описания звеньев является передаточная функция. В дальнейшем, при описании звеньев для краткости записи аргументы передаточных функций и переменных будем опускать.

