




Содержание
Введение ………………………………………..…..…………………………………………..…..…………….………..3
Лекция 1. Введение в цифровую обработку биомедицинских изображений ………………..……4
1.1 Основные методы получения медицинских изображений ………………………………………..…..…4
1.2 Изображения в системах медицинской диагностики ………………………………………………...….6
1.3 Технические средства обработки и регистрации изображений …………………………………..….8
Лекция 2. Основы цифрового представления изображений ……………………………………….…12
2.1. Модель формирования изображения. Дискретизация и квантование изображений.. …….…12
2.2. Фундаментальные соотношения между пикселями ………………………………………………...…15
Лекция 3. Пространственные методы улучшения биомедицинских изображений …..…....…17
3.1. Градационные преобразования изображений …………………………………………………...…..……17
3.2. Видоизменения гистограмм изображения …………………………………………………….………..…20
3.3. Методы улучшения изображений на основе арифметико-логических операций …………..…..22
3.4. Основы пространственной фильтрации. …………………………………………………………….....…24
3.5. Пространственные фильтры повышения резкости изображений ……………………………..…26
3.6. Комбинированные методы пространственного улучшенияизображений ………………..….…30
Лекция 4. Частотные методы улучшения биомедицинских изображений ………..…………..…33
4.1. Предварительные замечания. Введение в Фурье-анализ …………………………………………........33
4.2. Сглаживающие частотные фильтры …………………………………………………………..…….....…38
4.3. Частотные фильтры повышения резкости ……………………………………………………….…..…42
4.4. Гомоморфная фильтрация ……………………………………………….……………………………...….…48
Лекция 5. Восстановление биомедицинских изображений ……………………..…………………..…50
5.1. Модель процесса искажения и восстановления изображений. Модели шума ………...…..……50
5.2. Подавление шумов – пространственная фильтрация ……………………………………...…….....…56
5.3. Подавление периодического шума – частотная фильтрация. …………………………….…..……61
5.4.Оценка искажающей функции ………………………….…..……………………………….…..……..……..65
5.5Инверсная фильтрация ………………………….…..……………………………….…..……..…………….....67
5.6.Винеровская фильтрация ………………………….…..……………………………….…..……..…...……….67
5.7 Фильтрация методом минимизации сглаживающего функционала со связью …………………69
5.8 Геометрические преобразования ………………………….…..……………………………….…...……..….70
Заключение …………………………………..…..…………………………………………..…..…………….………..74
Список использованных источников …………………………………..…..…………………...….……..…..75
Введение
Данный конспект лекций является учебным пособием по университетскому курсу “Методы обработки медицинских изображений” для бакалавров, обучающихся по специальности 20100 “Биотехнические системы и технологии”.
Стремительное развитие новых технологий и устройств инструментальной медицинской диагностики обусловлено современными потребностями человечества в появление новых систем и устройств, расширяющих возможности клинического мониторинга и улучшающих качество жизни людей. Это требует от разработчиков диагностических систем медицинского назначения понимания физических процессов, происходящих при формировании зондирующих физических полей, их детектировании и обработки, а также знаний о современных методах обработки получаемой графической информации.
Значительное повышение технического уровня развития современных неинвазивных диагностических систем за счет совершенствования аппаратной реализации и технологий производства делает системы диагностической визуализации незаменимыми в повседневной клинической практике. При этом наряду со значительным повышением уровня развития техники, весьма существенную роль начинают играть методы обработки графической информации. Современные методики компьютерной обработки биомедицинских изображений обеспечивают улучшение изображений для их наилучшего визуального восприятия врачом-диагностом, эффективное сжатие изображений для надежного хранения и быстрой передачи данных по каналам связи.
Учебное пособие содержит информацию об основных методах получения биомедицинских изображений, общие сведения о цифровой обработке изображения, включает в себя подробный анализ существующих методик пространственной и частотной фильтрации изображений, а также обзор актуальных методов восстановления изображений.
Материалы данного учебного пособия являются введением в теорию и методы компьютерной обработки биомедицинских изображений, и дает основы для дальнейшего изучения этой многогранной и стремительно развивающейся области современной биомедицинской инженерии.
ГЛАВА 1. Введение в цифровую обработку биомедицинских
Изображений
1.1 Основные методы получения медицинских изображений
Развитие современных инструментальных диагностических средств привело к созданию и внедрению в практику различных методов получения изображений, используемых для диагностики патологий. При формировании диагностических изображений и их обработки в основном используют следующие типы изображений:
● планарные (рентгенография, сцинтиграфия – метод функциональной визуализации, заключающийся во введении в организм радиоактивных изотопов и получении изображения путём определения испускаемого ими излучения);
● послойные (линейная и компьютерная томография (КТ), МРТ, эмиссионная томография, позитронно-эмиссионная томография ПЭТ), томография – метод неразрушающего послойного исследования внутренней структуры объекта посредством его многократного просвечивания в различных пересекающихся направлениях;
● трехмерные (на основе спиральной КТ, УЗИ); Спиральное сканирование заключается в одновременном выполнении двух действий: непрерывного вращения источника – рентгеновской трубки, генерирующей излучение, вокруг тела пациента, и непрерывного поступательного движения стола с пациентом вдоль продольной оси сканирования. В этом случае траектория движения рентгеновской трубки, относительно оси направления движения стола с телом пациента, примет форму спирали. В отличие от последовательной КТ скорость движения стола с телом пациента может принимать произвольные значения, определяемые целями исследования. Чем выше скорость движения стола, тем больше протяженность области сканирования. Технология спирального сканирования позволила значительно сократить время, затрачиваемое на КТ-исследование и существенно уменьшить лучевую нагрузку на пациента.
● четырехмерные (изменение трехмерных в реальном времени);
● энергетические (доплерография –методика ультразвукового исследования, основанная на использовании эффекта Доплера. Сущность эффекта состоит в том, что от движущихся объектов ультразвуковые волны отражаются с измененной частотой. Этот сдвиг частоты пропорционален скорости движения лоцируемых структур – если движение направлено в сторону датчика, то частота увеличивается, если от датчика – уменьшается).
Классификация медицинских диагностических систем с визуализацией полей
1. Системы, использующие собственное излучение организма: основным представителем подобного рода систем являются системы термографии или тепловидения, основаны на регистрации излучения в ИК диапазоне спектра электромагнитного излучения организма. Пространственное распределение температуры кожных покровов отражает функциональное состояние человека и используется для диагностики патологий, связанных с нарушением терморегуляции. Область применения – диагностика заболеваний периферических сосудов, варикозное расширение вен и тромбофлебит.
2. Системы, использующие внешние источники излучения и зондирующие поля. Содержат в своем составе устройства формирования зондирующих полей, к такого рода системам относят системы ультразвуковой диагностики, цифровой ренгенографии и томографии, позитронно-эмиссионной томографии (ПЭТ). В Таблице 1 приведены сведения по физическим принципам получения диагностических изображений и областям применения основных методов.
ПЭТ – радионуклидныйтомографическийметод исследования внутренних органовчеловека. Метод основан на регистрации пары гамма-квантов, возникающих прианнигиляциипозитронов. Позитроны возникают припозитронном бета-распадерадионуклида, входящего в составрадиофармпрепарата, который вводится в организм перед исследованием. Выбор препарата обусловлен специфичностью исследования.
Под КТ понимают в узком смысле – рентгеновскую компьютерную томографию, так как именно этот метод положил начало современной томографии, является исторически первым методом медицинской визуализации. Суть метода ренгенографии – исследование внутренней структуры объектов, которые проецируются при помощи рентгеновских лучей на специальную плёнку или бумагу. Получение изображения основано на ослаблении рентгеновского излучения при его прохождении через различные ткани с последующей регистрацией прошедшего излучения на рентгеночувствительную плёнку. В результате прохождения через ткани разной плотности и состава пучок излучения рассеивается и тормозится, в связи с чем на пленке формируется изображение разной степени интенсивности. В результате, на плёнке получается усреднённое, суммационное изображение всех тканей (тень). Из этого следует, что для получения адекватного рентгеновского снимка необходимо проводить исследование рентгенологически неоднородных образований.
МРТ – томографический метод исследования внутренних органов и тканей с использованием физического явления ядерного магнитного резонанса – метод основан на измерении электромагнитного отклика ядер атомов водорода на возбуждение их определённой комбинацией электромагнитных волн в постоянном магнитном поле высокой напряжённости. Метод ядерного магнитного резонанса позволяет изучать организм человека на основе насыщенности тканей организма водородом и особенностей их магнитных свойств, связанных с нахождением в окружении разных атомов и молекул.
Достоинства МРТ:
- неинвазивность;
- отсутствие лучевой нагрузки;
- трехмерный характер получения изображения;
- отсутствие артефактов от костных тканей;
- высокая дифференциация мягких тканей.
Основные недостатки МРТ:
- значительное время;
- необходимое для получения изображений (10 секунд – н-ко минут), что приводит к появлению артефактов от дыхательных движений и биений сердца;
- невозможность надежного выявления камней, кальцификатов, некоторых видов костной патологии;
- достаточная высокая стоимость оборудования и его эксплуатации;
- специальные требования к помещениям, в которых находятся приборы (экранирование от помех);
- невозможность обследования больных с клаустрофобией, искусственными водителями ритма, крупными металлическими имплантами из немедицинских материалов.
Таблица 1 – Физические принципы получения диагностических изображений и области применения основных методов

1.2 Изображения в системах медицинской диагностики
Основные стадии цифровой обработки медицинских изображений:
- Регистрация изображений;
- Улучшение изображений (увеличение контрастности, частотная фильтрация);
- Восстановление изображений (очистка изображения от шумов);
- Сжатие изображений (устранение избыточности);
- Морфологическая обработка изображений (извлечение компонент изображения, которые могут быть полезны для представления и описания формы);
- Сегментация изображений (разделение изображений на составные части или объекты, выделение границ и контуров);
- Распознавание объектов на изображениях.
Компоненты систем обработки изображений
Первичным и основным компонентом системы обработки изображений является подсистема регистрации изображений, состоящая из двух элементов: чувствительный элемент (сенсор или датчик) – физическое устройство, обладающее чувствительностью к определенному виду излучаемой объектом энергии, а также цифровой преобразователь – устройство, преобразующее аналоговый выходной сигнал чувствительного элемента в цифровую форму. Другими компонентами системы обработки изображения являются: процессор обработки, включающий в себя АЛУ и элементы памяти, может представлять собой специализированное устройство или часть электронно-вычислительного модуля (например, ПЭВМ); программное обеспечение, ПЗУ для хранения исходных изображений и результатов их обработки, графические дисплеи, а также опциональные компоненты, такие как устройства получения твердых копий, элементы телекоммуникационных сетей.
Основные понятия и термины цифровой обработки изображений
1. Оптическое изображение – картина, получаемая в результате прохождения через оптическую систему световых лучей, распространяющихся от объекта, и воспроизводящая его контуры и детали.
2. Видимый свет –электромагнитное излучение, испускаемое нагретым или находящимся в возбуждённом состояниивеществом, воспринимаемое человеческимглазом, находится в диапазоне длин волн: 380 – 760нм (мнемоническое правило: “ к аждый о хотник ж елает з нать, г де с идит ф азан”).
фиолетовый à синий àголубой àзеленый àжелтый àоранжевый àкрасный.
Спектр электромагнитного излучения в порядке убывания энергии (возрастания длины волны): гамма излучениеàрентгеновское излучениеàультрафиолетовое излучениеàвидимый светàинфракрасное излучениеàмикроволновое (СВЧ) излучениеàрадиоволны.
Электромагнитные волны обладают свойством корпускулярно-волнового дуализма: то есть их можно трактовать как распространяющиеся синусоидальные колебания определенной частоты или длины волны, так и потоком частиц, движущихся с постоянной скоростью света и обладающих определенной энергией, но при этом нулевой массой; такие частицы обычно называют квантами излучения или фотонами.
3. Цвет – качественная субъективная характеристикаэлектромагнитного излученияоптического диапазона, определяемая на основании возникающегофизиологическогозрительногоощущенияи зависящая от ряда физических,физиологическихи психологическихфакторов.
Различаемые зрением человека цвета предметов определяются характером света, отраженного от этих предметов. Тело, которое отражает свет приблизительно одинаково во всем видимом диапазоне волн, представляется наблюдателю белым, в то время как тело, отражающее свет в одном ограниченном диапазоне длин волн, воспринимается с некоторым цветовым оттенком (пример: зеленый объект отражает свет с длинами волн 500-570 нм – зеленый диапазон спектра, поглощая боль-во энергии в других интервалах длин волн).
4. Монохроматический свет – свет, лишенный цветовой окраски. Единственным параметром такого освещения является его интенсивность или яркость. Для описания монохроматической яркости используется термин “уровень серого”, в силу того, что яркость изменяется от черного (минимальная яркость) до белого (максимальна яркость) с промежуточными серыми оттенками.
Источники света характеризуются тремя основными величинами:
- Энергетический поток – общее количество энергии, излучаемой источником света, измеряется в Вт.
- Световой поток – характеризует количество энергии, которое наблюдатель воспринимает от светового источника, измеряется в Лм. Иными словами этомощностьтакогоизлучения, котороедоступно для восприятия нормальным человеческим глазом. Для определения величины светового потока, необходимо спектральную плотность мощности излучения умножить на кривую спектральной чувствительности глаза (Vλ), затем проинтегрировать в пределах видимого диапазона длин волны (то есть от 380 до 780 нм). Полученный результат (Φe; измеряется в Вт) нужно умножить на фотометрический эквивалент излучения – Km: константа=683 лм/Вт.
- Яркость – субъективная величина восприятия света. Для монохроматических изображений эквивалентна понятию интенсивности. Тем не менее, существует вполне объективное понятие, такое как яркость источника излучения – отношение силы излучаемого света к площади проекции источника излучения на плоскость, перпендикулярную оси наблюдения. В системе СИ измеряется в канделах на м². Некоторые значения яркости: фотовспышка: 7∙1010 Кд/м2, полуденное солнце: 2∙109 Кд/м2, вольфрамовая нить накаливания: 6∙106 Кд/м2, минимальный порог чувствительности человеческого глаза: 10–5 Кд/м2.
- Сила света – физическая величина, одна из основных световых фотометрических величин. Характеризует величинусветовой энергии, переносимой в некотором направлении в единицу времени, количественно равна отношению светового потока, распространяющегося внутри элементарного телесного угла, к этому углу. Единица измерения СИ: кандела (кд).

- Контраст – разница в характеристиках различных участков изображения, а также способность фотографического материала или оптической системы воспроизводить эту разницу.
- Оптический контраст – отличимость предмета наблюдения от окружающего его фона.
- Контраст изображения или диапазон яркостей изображения – отношение яркостей самой светлой и самой тёмной частей изображения. Контрастность – степень контраста, чаще всего выражается безразмерной величиной, отношением или логарифмом отношений.
1.3 Технические средства обработки и регистрации изображений
Изображение представляет собой двумерное отображение наблюдаемой трехмерной сцены, возникающее как результат регистрации лучистой энергии, исходящей из наблюдаемой сцены с помощью некоторого устройства – сенсора или совокупности сенсоров. Регистрируемый сенсором сигнал возникает в результате взаимодействия источника освещения с элементами сцены в условиях эффектов отражения и поглощения энергии этого источника. В зависимости от природы источника света и особенностей сцены, энергия освещения отражается от объектов сцены или проходит сквозь них. Энергия излучаемая, отражаемая или пропускаемая элементами сцены, фиксируется с помощью специального устройства регистрации, чувствительного к излучаемой сценой энергии. В некоторых случаях отраженная или проходящая энергия направляется на фотопреобразователь – например, экран, покрытый фосфоресцирующим материалом, который преобразует энергию в видимый свет. Такой подход применяется в электронной микроскопии и при регистрации изображений в гамма-лучах.
В настоящее время используется три основных схемы размещения чувствительных элементов: одиночный чувствительный элемент (ЧЭ), линейка ЧЭ и матрица ЧЭ.
Падающая энергия преобразуется в напряжение благодаря сочетанию материала, обладающего чувствительностью к интересующему виду излучения, и приложенной к нему электрической энергии. В ответ на энергию внешнего излучения ЧЭ выдает сигнал выходного напряжения или тока, который затем преобразуется в цифровую форму.
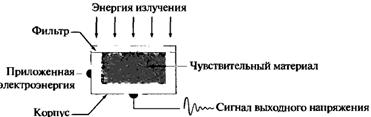
Рисунок 1 – Одиночный чувствительный элемент
Наиболее известным сенсором такого типа является фотодиод, изготовленный из полупроводникового материала (кремния), напряжение выходного сигнала которого пропорционально освещенности. Установка фильтра перед ЧЭ обеспечивает спектральную избирательность сенсора, например, если установить зеленый стеклянный фильтр, то выходной сигнал будет выше для зеленого участка видимого спектра, чем для всех остальных.
Для получения двумерного изображения с помощью одиночного сенсора необходимо обеспечить его перемещение в двух взаимно перпендикулярных направлениях относительно регистрируемой области (рисунок 2). Одиночный сенсор закреплен на ходовом винте, вращении е которого приводит к линейно подаче в перпендикулярном направлении.

Рисунок 2 – Перемещение одиночного сенсора при регистрации двумерного изображения
Для считывания изображений чаще применяют одномерный массив сенсоров, располагаемый вдоль прямой.
Такая линейка сенсоров обеспечивает одновременную регистрацию элементов изображения в одном направлении (т.е. условно говоря, по строке), а перемещение всей линейки в перпендикулярном направлении позволяет получить все строки изображения.
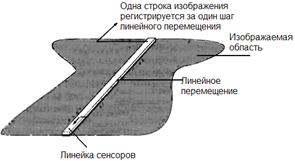
Рисунок 3 – Считывание изображений с помощью линейки сенсоров
Кольцеобразные наборы сенсоров применяются для получения изображений поперечного сечения (“срезов”) трехмерных объектов (рисунок 4). Вращающийся рентгеновский источник освещает объект, а расположенные на противоположной стороне кольца детекторы рентгеновского излучения улавливают энергию рентгеновских лучей, прошедших сквозь объект.

Рисунок 4 – Считывание изображений с помощью кольцеобразного набора сенсоров
Важно заметить, что выходные сигналы сенсоров подлежат обработке с помощью алгоритмов реконструкции, задача которых состоит в преобразовании регистрируемых данных в осмысленные изображения поперечных срезов. Таким образом, изображение среза не может быть получено простой регистрацией принимаемых сигналов одновременно с движением источника, а необходима значительная по объему обработка первичных данных. Трехмерное изображение исследуемого объекта, состоящее из серии последовательных срезов, полученных с некоторым шагом, генерируется путем перемещения объекта в направлении, перпендикулярном плоскости кольца. Также существуют другие способы регистрации изображений на основе томографического подхода, но на базе иных физических процессов, в частности, получение изображений методом ЯМР и ПЭТ.
На рисунке 5 изображен процесс регистрации цифрового изображения объекта с помощью матрицы сенсоров. Такая конструкция находится внутри подавляющего большинства цифровых камер, в котором ЧЭ является матрица на основе приборов с зарядовой связью (ПЗС) с широким диапазоном чувствительных свойств. Ответная реакция ЧЭ на падающее излучение пропорциональна интегралу световой энергии, попадающей на поверхность ЧЭ за время экспозиции, за счет чего достигается уменьшение шумов изображения. Главное достоинство использования матрицы ЧЭ состоит в том, что появляется возможность считать сразу все изображение, если сфокусировать на поверхности матрицы отвечающий ему пространственный поток лучистой энергии. В данном случае отпадает потребность в механическом перемещении сенсоров.
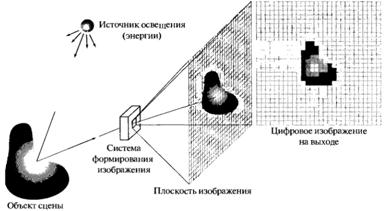
Рисунок 5 – Процесс регистрации цифрового изображения объекта с помощью матрицы сенсоров
Функция системы формирования изображения состоит в том, чтобы собрать поступающую энергию и сфокусировать ее на плоскости изображения. Если для освещения используется источник видимого света, то на входе системы формирования изображения имеется объектив, который проецирует наблюдаемую сцену на плоскость изображения. Совмещенная с этой плоскостью матрица ЧЭ генерирует набор выходных сигналов, каждый из которых пропорционален интегралу световой энергии, принятой соответствующим сенсором. С помощью цифровых и аналоговых электронных блоков данные выходные сигналы поочередно преобразуются в комплексный видеосигнал. Регистрация двумерного сигнала осуществляется дискретно расположенными в пространстве сенсорами, что обеспечивает пространственную дискретизацию сигнала, квантование сигнала осуществляется в аналого-цифровом преобразователе системы формирования изображения.
ГЛАВА 2 Основы цифрового представления изображений
2.1 Модель формирования изображения. Дискретизация и квантование изображений
Изображение будем рассматривать как двумерную функцию вида f(x, y), значение функции f в точке с пространственными координатами (x, y) является положительной скалярной величиной, физический смысл которой определяется источником изображения. Большинство медицинских изображения являются монохромными (черно-белыми) и их значения находятся в некотором диапазоне яркостей. В том случае, если изображение генерируется в результате физического процесса, его значение пропорциональны энергии излучения некоторого физического источника, например, энергии ЭМ колебаний. Функцию f(x, y) можно характеризовать двумя компонентами: освещенностью – величиной светового потока, который падает на наблюдаемую сцену от источника и коэффициентом отражения или коэффициент пропускания (например, при формировании рентгеновского изображения) – относительной долей светового потока, отраженного от объектов этой сцены. Произведение этих функций дает искомую функцию изображения: f(x, y)= i(x, y)· r(x, y). Коэффициент отражения может меняться в пределах от 0 (полное поглощение) до 1 (полное отражение). Природа функции i(x, y) зависит от источника освещения, тогда как функция )· r(x, y) определяется свойствами объектов изображаемой сцены. Типичные значения коэффициента отражения: 0,01 – черный бархат, 0,8 – стена белого цвета, 0,9 – посеребренная металлическая поверхность, 0,93 – снег.
Цифровое изображение формируется на основе данных, воспринимаемых ЧЭ. Выходной сигнал ЧЭ чаще всего представляет собой непрерывно меняющееся напряжение, чтобы получить цифровое изображение необходимо преобразовать непрерывно меняющийся сигнал в цифровую форму, эта операция включает в себя два процесса – дискретизацию и квантование. Представление координат в виде конечного множества отсчетов называется дискретизацией, а представление амплитуды (то есть яркости) дискретными значениями из конечного множества – квантованием.
Дискретизация изображения на практике определяется конструкцией применяемого сенсорного устройства. Для одиночного сенсора дискретизация получаемого изображения определяется выбором шагов механического перемещения сенсора в процессе сбора данных. Минимально возможный шаг дискретизации определяется несовершенством оптической системы, применяемой для фокусировки светового пятна на ЧЭ, точность которой оказывается хуже, чем достигаемая тонность механического перемещения сенсора. При использовании линейки или матрицы сенсоров на дискретизацию изображения оказывает влияние количество сенсоров. Качество цифрового изображения в большей степени зависит от числа отсчетов при дискретизации и числа уровней квантования.
В результате операций квантования и дискретизации координаты (x, y) становятся дискретными значениями, само изображение представлено в виде матрицы размером M× N, за начало координат принимают верхний левый угол. Каждый элемент такой матрицы называется пикселем. На рисунке 6 представлена система координат для представления цифровых изображений.
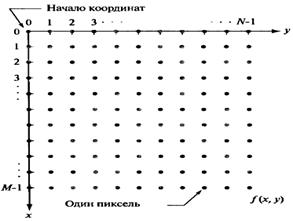
Рисунок 6 – Система представления цифровых изображений
Для выполнения процесса оцифровки изображения необходимо принять решения относительно значений M и N, а также числа уровней (градаций) яркости L, разрешенных для каждого пикселя. Значение L по соображениям удобства построения оборудования для обработки, хранения и дискретизации принято выбирать равным целочисленной степени двойки L==2k. Величина k определяет так называемую “битность” изображения, принято говорить о 8 битном или 32 битном изображениях.
Дискретные уровни яркости расположены с постоянным шагом, то есть используется равномерное квантование, и принимают целые значения в интервале от 0 до L–1, при этом значение L=0 принимается за уровень черного, а L=L–1 принимается за уровень белого. Интервал значений яркости иногда называют динамическим диапазоном изображения, если в изображении заметная доля пикселей занимает значительную часть всего диапазона уровней серого, то данное изображение обладает высоким контрастом, изображения с малым динамическим диапазоном выглядят тусклыми, размытыми и серыми.
Общее количество битов памяти, необходимое для хранения цифрового изображения определяется по формуле: b= M× N× k, так 8-битное изображение размерами 1024×1024 требует для хранения 1 Мб памяти.
Принято разделять пространственное и яркостное разрешения изображений. Пространственное разрешение определяется дискретизацией и определяет размер мельчайших различимых деталей на изображении. Яркостным или полутоновым разрешением называется мельчайшее различимое изменение яркости, что по определению является субъективным. Пари выборе числа градаций яркости учитывают особенности аппаратуры, наиболее часто выбирают 8-битное или 16-битное представление. Оптимальный выбор уровня градаций яркости и пространственного разрешения изображения обусловлен уровнем детализации самого изображения, областью применения и дальнейшей обработки изображения. Проведенные исследования так называемых кривых равного предпочтения, построенных в координатах N÷ k показали, что для изображения с большим количеством деталей может оказаться достаточным лишь небольшое число градация яркости.
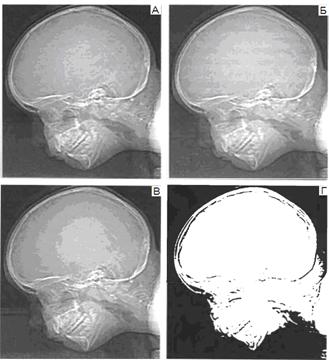
Рисунок 7 – Изображение черепа человека размерами 452×374;
А – 256 градаций яркости, Б – 64, В – 16, Г – 2
Наложения спектров. Увеличение и уменьшение цифровых изображений
Введем понятие частоты дискретизации изображений как число отсчетов на единицу длины по обоим пространственным направлениям. При недостаточно высокой частоте дискретизации возникает явление наложение спектров, которое приводит к искажению дискретного изображения.
Увеличение или уменьшение изображения может рассматриваться как повышение или понижение частоты дискретизации соответственно. Для увеличения изображения необходимо выполнить две операции: создание новой матрицы пикселей и присвоение этим пикселям определенных значений яркости. Последняя операция подразумевает использование методов интерполяции, то есть нахождения промежуточныхзначений яркости пикселей увеличенного изображения по имеющемуся дискретному набору значений яркостей пикселей исходного изображения. Существует несколько методов интерполяции изображения, одним из простейших методов считается интерполяция по ближайшему соседу (частный случай такой интерполяции – метод дублирования пикселей, который имеет место при увеличении изображения в целое число раз). Данный метод интерполяции имеет высокое быстродействие, однако, при большой кратности увеличения приводит к значительной ступенчатости получаемого изображения. Более сложным методом интерполяции является билинейная интерполяция, в которой используются четыре ближайшие соседа пикселя увеличенного изображения. Пусть (x′, y′) – координаты точки на увеличенном изображении, v(x′, y′) – приписываемый данной точке уровень яркости определяется следующим образом:

где: a, b, c, d – находятся из системы четырех линейных уравнений с четырьмя неизвестными, составленной для четырех ближайших соседей точки (x′, y′) и определяются как: d=v(0, 0); c=v(0, 0)–v(1, 0)–v(0, 1)+v(1, 1); b=v(0, 1)–v(0, 0); a=v(1, 0)–v(0, 0).
Уменьшение изображений осуществляется способами, аналогичными вышеизложенными для увеличения.
2.2 Фундаментальные соотношения между пикселями
У элемента изображения p с координатами (x, y) имеются четыре соседа по вертикали и горизонтали, координаты которых определяются следующим образом:

Данное множество пикселей называется четверкой соседей p и обозначается N4(p). Четыре соседа p по диагонали имеют координаты и обозначаются ND(p):

Смежность, связность, области и границы
Два элемента изображения являются смежными только в том случае, если они являются соседями и их уровни яркости удовлетворяют заданному критерию сходства (например, для бинарного изображения, яркость элементов может принимать только два значения 0 и 1, два пикселя могут входить в четверку соседей друг друга, но считаются смежными только в том случае, если их значения совпадают). Для полутоновых изображений множество значений яркости, используемое при определении понятия смежности, состоит, как правило, из большего числа элементов.
Дискретный путь или дискретная кривая от пикселя p с координатами (x, y) до пикселя q с координатами (s, t) называется неповторяющаяся последовательность пикселей с координатами:

где: (x0, y0)=(x, y), (xn, yn)=(s, t) и пиксели (x i, y i)и (x i -1, y i -1) являются смежными при 1≤ i ≤ n, в этом случае n называется длиной пути. Если (x0, y0)= (xn, yn), то путь называется замкнутым.

Рисунок 8 – Конфигурация пикселей
Пусть S – некоторое подмножество элементов изображения, два его элемента p и q называются связными в S, если между ними существует путь, целиком состоящий из элементов подмножества S. Для любого пикселя p из S множество всех пикселей, связных с ним в S, называется связной компонентой S. Если множество S содержит только одну компоненту связности, оно называется связным множеством.
Пусть R – подмножество элементов изображения. Будем называть его областью, если R – связное множество. Границей области R (также называемой замкнутым контуром или краем) назовем множество пикселей этой области, у которых один или более соседей не являются элементами R. Если подмножество R есть все изображение, то его граница по определению состоит из элементов первого столбца и первой строки, а также элементов последнего столбца и последней строки.
Между контуром и границей существует разница: граница конечной области всегда образует замкнутый путь и поэтому является “глобальным” понятием. Контуры изображения состоят из пикселей, на которых значения производной яркости превышают заранее установленный порог. Таким образом, контур является локальным понятием, основанным на мере непрерывности уровня яркости в некоторой точке, то есть будем понимать контуры как разрывы яркости, а границы – как замкнутые пути.
Меры расстояния
Пусть элементы изображения p, q и z имеют координаты (x,y); (s, t); (v, w), соответственно. Функция D называется функцией расстояния или метрикой, если:
А) D(p, q)≥0, причем D(p, q)=0 тогда и только тогда, когда: p=q;
Б) D(p, q)= D(q, p);
В) D(p, z)<D(p, q)+ D(q, z).
Евклидово расстояние (метрика L2) между элементами p и q определяется следующим образом:

При данной метрике пиксели, находящиеся на расстоянии не более r от заданной точки (x,y) образуют круг радиуса r с центром в этой точке.
Расстояние D4 (метрика L1) между элементами p и q определяется следующим образом:

В этом случае пиксели, находящиеся на расстоянии D4 от заданной точки (x,y), образуют повернутый на 450 квадрат с центром в этой точке.
Расстояние D8 (метрика L∞) между элементами p и q определяется следующим образом:

В этом случае пиксели, на расстоянии D8 от заданной точки (x,y) образуют квадрат с центром в этой точке.
Поэлементные операции над изображениями. Линейные и нелинейные преобразования
Цифровые изображения представляются в виде матрицы, в силу этого такие операции как умножение или деление двух изображений выполняются исключительно поэлементно: первый пиксель первого изображения умножается на первый пиксель второго изображения и т.д., и требуют представление обоих изображений в виде матриц одинакового размера.
Пусть H – оператор, входом и выходом которого являются изображения. Говорят, что оператор H линейный, если для любых двух изображения f и g и любых двух скалярных значений a и b справедливо равенство вида:


