




Эта классическая проблема синхронизации коллектива взаимодействующих объектов была поставлена Дж. Майхиллом в 1957 г. и опубликована в [ЕМ62]. Данной проблеме посвящено большое количество литературы. На русском языке обсуждение проблемы было опубликовано в книге [ММ71].
Постановка проблемы
Проблема состоит в следующем. Дана цепочка стрелков конечной но произвольной длины. Каждый стрелок может находиться в одном из конечного числа состояний. Все стрелки должны одновременно произвести залп, т. е. перейти в одно и то же заключительное состояние после команды, принятой на одном конце цепочки крайним стрелком. Стрелки не умеют считать, они общаются только со своими соседями. На каждом шаге по времени состояние каждого из стрелков может измениться как функция его собственного состояния на предыдущем шаге и предыдущего состояния двух его соседей. На одном краю цепочки находится Генерал, который в начальный момент переходит в состояние приготовиться. Тем самым он подает команду, т. к. его новое состояние воспримется на следующем шаге по времени его соседом — крайним стрелком. На другом конце цепочки находится Сержант. Алгоритмы Генерала и Сержанта могут отличаться от алгоритма функционирования
стрелков, которые все одинаковы. Этот алгоритм функционирования стрелков и нужно построить.
Идея решения
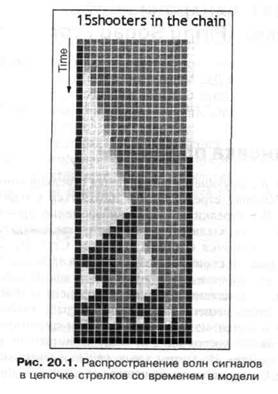
Основная идея решения заключается в посылке по цепи стрелков сигналов, распространяющихся с разной скоростью. Очевидно, что самая большая скорость распространения сигнала по цепи — один стрелок в единицу времени. Если один сигнал распространяется втрое медленнее другого, то два этих сигнала могут встретиться на середине цепочки после, того, как более медленный сигнал отразится от края цепи. Сигнал в нашем случае — это изменение состояния элемента цепи — стрелка. Пример распространения сигналов представлен на рис. 20.1. Каждая строка отражает состояния стрелков цепочки на очередном шаге по времени. В каждой строке прямоугольники представляют стрелков, цвет прямоугольников показывает состояние стрелка. Крайний левый прямоугольник — Генерал, крайний правый прямоугольник — Сержант. В приведенном здесь решении моделируется работа алгоритма из 13 состояний, число шагов которого о(п), и всегда меньше Зп, где п — число стрелков.
Описание модели
Модель Firing Squad Problem находится в папке Model Examples\Part V. Она содержит три активных объекта, которые моделируют поведение Генерала, Сержанта и стрелка. Модель собирается в корневом объекте Root, который включает одного Генерала, массив стрелков и одного Сержанта.
Модель Генерала
Модель Генерала (General) содержит внутреннюю переменную mystate типа char и две интерфейсные переменные того же типа, exposeMystate и right. Кроме того, объект содержит стейтчарт и два статических таймера (рис. 20.2).

Переменная mystate принимает значение текущего состояния этого активного объекта. Состояния объектов в модели обозначаются символами. Выходная интерфейсная переменная называется exposeMystate, она передает состояние данного активного объекта тем переменным, которые будут с нею связаны. Входная интерфейсная переменная right будет показывать состояние соседа справа. Начальные значения этих переменных неважны.
Стейтчарт с именем main содержит три состояния, начальное с именем а, состояние готов с именем r, и состояние стреляй с именем S. В нашей модели активные объекты переходят из состояния в состояние синхронно, каждую единицу модельного времени, но только в том случае, если выполнены условия перехода — в частности, соседи находятся во вполне определенных состояниях. Самое простое решение смоделировать такие переходы — это выполнять их по сигналу с учетом защиты (Guard). Сигналом, по которому разрешен переход, является получение любого объекта типа
object, этот сигнал периодически будет посылаться стейтчарту таймером synchro. Переход из состояния а в состояние r осуществляется, как только такое событие произойдет, потому что Генерал делает первый шаг, выдавая команду приготовиться независимо от каких-либо условий с самого начала функционирования системы. Переход Генерала из состояния r в заключительное состояние s требует, чтобы состояние его правого соседа было тоже готов, т. е. имело имя r.
При входе в каждое состояние переменной myState присваивается значение, соответствующее этому состоянию, например, при входе в состояние с именем r выполняется оператор mystate= 'R'.
"Жизнь" этому объекту придает таймер synchro, который периодически каждую единицу модельного времени генерирует событие, направленное непосредственно стейтчарту с именем main. Это описывается вызовом функции fireEvent с передачей произвольного, объекта базового типа object у стейтчарта:
main.fireEvent(new Object ());
Аргументом у функции fireEvent () может быть, в частности, объект любого типа, а переход стейтчарта может быть определен, если объект именно этого класса получен. Поскольку здесь важен лишь факт получения события, использована передача объекта класса object, и в защите соответствующего перехода получение объекта именно этого класса проверяется. Второй таймер с именем timer — тоже периодический. Он разрешает передачу значения текущего состояния в интерфейсную переменную exposeMystate. Такая передача не может быть осуществлена в тот же самый момент, в который состояние объекта изменилось, потому что принятие решения о переходах всех активных объектов производится на основании состояний соседей на предыдущем такте. Поэтому измененное состояние объекта передается в интерфейсную переменную тоже периодически, но с небольшим сдвигом по времени. Такой сдвиг позволяет передачу состояния соседям осуществить только после того, как все объекты установят свое новое состояние в соответствии с предыдущим состоянием соседей.
Модель Сержанта
Модель Сержанта (sergeant) строится полностью аналогично модели Генерала. Исключение составляет только то, что начальное состояние Сержанта помечено меткой M и переход из этого состояния в состояние r (состояние Готов) осуществляется, только если выполняется некоторое условие, отражающее состояние его левого соседа.
Модель стрелка
Модель стрелка (soldier) аналогична моделям предыдущих двух типов. У стрелка два соседа, и переходы между состояниями стрелок осуществляет, только если эти соседи находятся во вполне определенных состояниях. Построение системы переходов и нахождение этих условий и составляет проблему синхронизации автоматов. Некоторые переходы очевидны. Например, если стрелок находится в состоянии готов (r), то он может перейти в заключительное состояние Огонь (s), только если оба его соседа тоже находятся в этом состоянии.
Корневой объект
Корневой объект с именем Root включает один объект типа Генерал, один объект типа Сержант и массив стрелков. Массив стрелков задается тем, что в поле Количество объектов для введенного в окно Root объекта soldier устанавливается параметр N. Этот параметр задается как параметр объекта
Root.
Объекты, введенные в поле редактора объекта Root, имеют интерфейсные переменные, и их нужно соединить подходящим образом. Такое соединение двух объектов может быть выполнено графически в поле графического редактора проведением соединительной линии (коннектора), однако в данной модели мы должны соединить переменное число объектов (в массиве стрелков их количество задается параметром). Альтернативная возможность соединения — использовать библиотечную функцию соединения, которая, собственно, и порождается для каждого коннектора при трансляции графического изображения структуры активного объекта в соответствующий код на языке Java.
Соединение нужно выполнить до начала работы модели, поэтому соответствующий код записывается в поле Код инициализации окна Код объекта Root. Сначала двумя операторами связывается выходная переменная exposeMystate Генерала с входной переменной left самого левого стрелка, а также входная переменная right этого стрелка с входной переменной exposeMystate Генерала:
general._ref_exposeMyState.connect(soldier.item(0)._ref_left); general._ref_right.connect(soldier.item(0)._ref_exposeMyState);
Далее в цикле связываются между собой стрелки, а последней парой операторов крайний правый стрелок связывается с Сержантом.
Корневой объект включает статический таймер drawStates, который периодически строит в поле анимации визуальное представление состояния всей системы в текущий момент времени. Сделать это удобно после того, как все элементы системы установили свои состояния, т. е. с некоторым сдвигом
модельного времени относительно целых его значений. Здесь это сделано со сдвигом на 0.5. В поле Действие при срабатывании этого таймера выполняются операторы, выполняющие визуализацию.

