




Цель работы: знакомство с принципом действия и со структурой механизмов, приобретение навыков в составлении кинематических схем механизмов.
Теоретическая часть
1.1. Основные определения
Механизм – система твердых тел, называемых звеньями, предназначенная для преобразования движения одного или нескольких звеньев в требуемые движения других звеньев. Звено может состоять изодной или нескольких жестко соединенных между собой деталей.
Стойка – неподвижное звено.
Входное звено – звено, которому сообщается движение, преобразуемое механизмом в требуемые движения других звеньев. На модели механизма оно определяется наличием ручки.
Выходное звено – звено, совершающее движение, для выполнения которого предназначен механизм.
Кинематическая пара – соединение двух соприкасающихся звеньев, допускающее их относительное движение. Пары, в которых элементом соприкосновения является точка или линия, называются высшими; пары с соприкосновением звеньев по поверхности называются низшими. Низшие пары подразделяются на вращательные, поступательные, цилиндрические, винтовые, сферические и плоскостные.
Класс кинематической пары определяется количеством наложенных связей, т. е.
S = 6 – Н,
где S – число связей (ограничений), наложенных парой на относительные движения звеньев; Н – число возможных относительных движений звеньев.
Кинематическая цепь – система звеньев, связанных между собой кинематическими парами.
1.2.Классификация механизмов
Механизмы подразделяются на:
- плоские и пространственные;
- трех, четырех, пяти, шести и многозвенные;
- рычажные, шарнирные, кулачковые, зубчатые, фрикционные, ременные, цепные и др.
Плоский механизм – механизм, подвижные звенья которого совершают плоское движение, параллельное одной и той же неподвижной плоскости. Все остальные механизмы, относятся к пространственным.
Рычажным называется механизм, звенья которого образуют только низшие кинематические пары.
Шарнирный механизм – частный случай рычажного, в котором звенья образуют только вращательные пары.
Зубчатым называют механизм, предназначенный для прямого преобразования параметров вращательного движения входного звена – зубчатого колеса, червяка в параметры движения выходного звена – зубчатого колеса, червячного колеса.
Зубчатым колесом называется вращающееся звено, имеющее замкнутый зубчатый контур. Меньшее из двух зубчатых колес в паре называют шестерней.
Зубчатые механизмы подразделяют:
а) по расположению осей
- с параллельными осями зубчатых колес (цилиндрические),
- с пересекающимися осями (конические),
- с перекрещивающимися осями (червячные);
б) по направлению зубьев
- прямозубые,
- косозубые,
- шевронные,
- с криволинейным зубом.
Кулачковым называют механизм, в состав которого входит кулачок
- звено, имеющее элемент высшей пары, выполненный в виде поверхности переменной кривизны. Звено кулачкового механизма, совершающее поступательное движение, называется толкателем.
Фрикционным называют механизм, передающий движение с помощью сил трения.
Механизмами с гибкой связью называются механизмы, в которых движение передается гибким звеном. К ним относятся цепные и ременные передачи.
Цепная передача служит для передачи вращения между параллельными осями с помощью звездочек и перекинутой между ними бесконечной цепи.
Ременная передача передает вращательное движение с помощью бесконечного приводного ремня, натянутого на шкивы.
1.3.Виды рычажных механизмов и их звенья
Шарнирный четырехзвенник – шарнирный четырехзвенный механизм.
Шарнирный четырехзвенник, в состав которого входят кривошип и коромысло, называется кривошипно-коромысловым; два кривошипа, – двухкривошипным; два коромысла, – двухкоромысловым.
Рычажный четырехзвенный механизм, в состав которого входят кривошип и ползун, называется кривошипно-ползунным, коромысло и ползун, – коромыслово-ползунным; кулиса, – кулисным.
Кривошип – вращающееся звено рычажного механизма, которое может совершать полный оборот вокруг неподвижной оси.
Коромысло – вращающееся звено рычажного механизма, которое может совершать неполный оборот вокруг неподвижной оси.
Шатун – звено рычажного механизма, образующее вращательные кинематические пары только с подвижными звеньями.
Ползун – звено рычажного механизма, образующее поступательную пару со стойкой.
Кулиса – звено рычажного механизма, вращающееся вокруг неподвижной оси (или движущееся поступательно относительно стойки) и образующее с другим подвижным звеном – камнемкулисы поступательную пару.
1.4.Составление кинематической схемы и определение числа степеней подвижности механизма
При анализе механизма его изображают в виде кинематической схемы. Схема выполняется в соответствии с условными обозначениями, установленными ГОСТ 2.770-68, выдержки из которого приведены в приложении 2.
Число степеней подвижности пространственного механизма определяется по формуле
W = 6n - 5р5 - 4p4 - 3p3 - 2p2 -p1,
 где n – число подвижных звеньев механизма; р n — число кинематических пар соответственно пятого, четвертого, третьего, второго и первого классов.
где n – число подвижных звеньев механизма; р n — число кинематических пар соответственно пятого, четвертого, третьего, второго и первого классов.
Для определения числа степеней подвижности плоского механизма пользуются формулой П. Л. Чебышева
W = 3n -2p5 – р4.
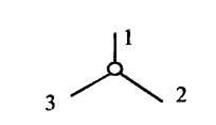
Рис.1. Сложный шарнир
Степень подвижности механизма показывает, скольким звеньям надо задать движение, чтобы все остальные подвижные звенья начали двигаться определенным образом. В тех случаях, когда в механизме имеются сложные шарниры, соединяющие более двух звеньев (рис. 1), число кинематических пар принимается на единицу меньше числа соединяемых звеньев.
Следует иметь в виду, что в механизмах могут встретиться пассивные связи и лишние степени свободы, не влияющие на движение звеньев механизма. На рис. 2,а изображена схема механизма параллелограмма, в котором звено 4 накладывает пассивную связь; на рис. 2,6 – схема кулачкового механизма, в котором за счет вращения вокруг своей оси ролика 2 появляется лишняя степень свободы.
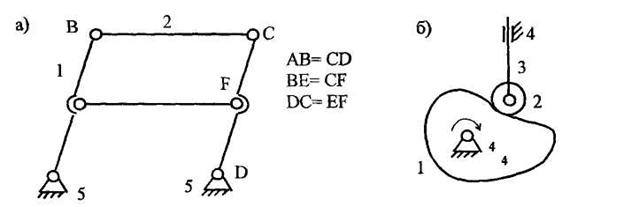
Рис. 2. Пассивная связь и лишняя степень свободы
Практическая часть
Необходимо составить схемы двух-трех механизмов и определить для каждого из них число степеней подвижности.
Оборудование и принадлежности: модели механизмов ( поуказанию преподавателя), чертежные принадлежности.
Порядок выполнения работы
1. Ознакомиться с механизмами, разобраться в характере движения его звеньев, определить, к какому виду он относится (рычажный, зубчатый, кулачковый и т. п.), плоский он или пространственный, установить его назначение (по преобразованию движений).
2. Составить схему механизма с соблюдением относительных размеров и расположения звеньев. Положение входного звена выбрать таким, при котором видны все остальные звенья. Входное звено выделить стрелкой, указывающей направление движения.
3. Пронумеровать звенья арабскими цифрами в порядке их присоединения к входному звену, кинематические пары обозначить буквами латинского алфавита
4. Дать название всем звеньям механизма, исходя из характера их движения и видов образуемых кинематических пар.
5. Определить класс и вид каждой кинематической пары. Заполнить таблицу кинематических пар в отчете.
6. При наличии пассивных связей и лишних степеней свободы указать их в отчете и для дальнейшего анализа исключить.
7. Определить число степеней подвижности механизма.
8. Проделать аналогичную работу для следующих механизмов.
9. Составить отчет по форме, приведенной в примере (см. таблицу 1 ).
Контрольные вопросы
1. Что называется механизмом? Какие механизмы называют плоскими, рычажными, зубчатыми и т. п.?
2. Что такое кинематическая цепь? Чем отличаются понятия "кинематическая цепь" и "механизм"?
3. Дайте понятие звена механизма. Что такое входное, выходное звено? Какие звенья рычажного механизма вы знаете?
4. Что такое кинематическая пара? Каковы признаки высших (низших) кинематических пар?
5. В чем заключается структурный анализ механизма?
6. Поясните формулу Чебышева. Что подразумевается под степенью подвижности механизма?
Обозначения и классификацию кинематических пар с расчётом подвижности механизма выполнить по примеру таблицы 1.
Условные обозначения кинематических пар приведены в таблице 2.
Таблица 1
Кинематические пары
| Обозначе- ние | Звенья, образующие пару | Класс пары | Вид пары |
| А | 1 - 6 | 5 | вращательная, низшая |
| В | 1 - 2 | 5 | вращательная, низшая |
| С | 2 - 3 | 5 | вращательная, низшая |
| D | 3 - 6 | 5 | вращательная, низшая |
| С | 3 - 4 | 5 | вращательная, низшая |
| Е | 4 - 5 | 5 | вращательная, низшая |
| F | 5 - 6 | 5 | поступательная, низшая |
Степень подвижности механизма: W = 3n - 2p5 - p4,
где n – число подвижных звеньев, n = 5;
P 5 – число пар 5 класса, P 5 = 7,
Р4 – число пар 4 класса, Р4 = 0.
W = 3-5-2-7-0 = 1.
Таблица 2

