




Целями управления процессами пуска и торможениямогут, например, являться:
1)Минимизация времени пуска и торможения.
Время этих процессов будет тем меньше, чем больше будет угловое ускорение, то есть скорость изменения скорости - ее нарастания или спада.
Угловое ускорение будет тем выше, чем больше динамический момент с плюсом (при пуске) или с минусом (при торможении).
На величину этого момента, связанного в первую очередь с током, и направлено управление.
2)Ограничение электромагнитного момента, тока и ускорений при пуске и торможении.
Как правило, именно при пуске и торможении значение момента и токов максимальное. Чтобы не проектировать электродвигатель и преобразователь под эти большие токи, не действующие в номинальном режиме, их ограничивают.
 Рис. 8.4. Механическая характеристика (естественная и искусственная)
Рис. 8.4. Механическая характеристика (естественная и искусственная)
| Пример вида механических характеристик для ДПТ с независимым возбуждением приведен на рис.8.4: 1-2 – естественная механическая характеристика; 1-5-6 – искусственная механическая характеристика, полученная при ограничении токов и момента. |
При этом ограничиваются токовые нагрузки на обмотку и полупроводниковые элементы.
Типичная функциональная схема ЭП с таким управлением приведена на рис.8.5.
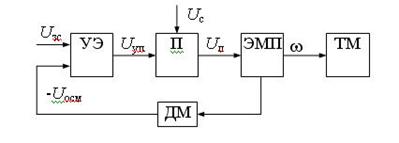
Рис. 8.5. Функциональная схема ЭМС электропривода с осуществлением оптимальных процессов пуска, торможения и реверсирования
ЭМП питается от сети через управляемый преобразователь электрической энергии (П).
Преобразователь П выполняет две задачи:
- преобразует электроэнергию источника к виду, требующемуся для двигателя;
- изменяет параметры этой электроэнергии, например: значение напряжения, частоты и т.д. (задача управляемого П).
Изменение параметров электроэнергии осуществляется по сигналам от управляющего элемента (УЭ) U у.п.
В данном случае сигнал управления формируется, исходя из сравнения напряжения U о.с.м, соответствующего текущему значению момента, и напряжения, соответствующего U з.сзаданному значению момента.
Информация о текущем значении момента снимается датчиком момента (ДМ). В качестве датчика момента в двигателе, в котором момент пропорционален току, может выступать датчик тока.
Цепь, связывающая выход двигателя с управляющим устройством, представляет собой обратную связь по моменту. В данном случае она действует только в переходных режимах (при пуске и торможении)
В итоге на фазы двигателя подается такое напряжение, при котором ЭМП обеспечивает необходимое изменение момента двигателя во времени.
| Пример реализации задачи ограничения тока (момента) (рис.8.6). Здесь: роль УЭ выполняет блок суммирования, а роль преобразователя – блок УП (управляемого преобразователя). В качестведатчикатока используется сопротивление R ос, падениенапряжениянакотором (IR ос) пропорциональнотокуякоря I. Сигналотрицательной обратнойсвязипотоку (U ос=α I, гдеα–коэффициентобратнойсвязипотоку) сравниваетсясзаданным U з. Результирующий сигнал определит такой сигнал управления ключами управляемого преобразователя УП, при котором ток не будет превышать предельное значение I пред. |  Рис. 8.6. Функциональная схема ЭМС электропривода
Рис. 8.6. Функциональная схема ЭМС электропривода
|

