




Расчет статически неопределимой рамы
Методом перемещения.

Рис. 1. Заданная расчетная схема
Постановка задачи расчета
1. Составить основную систему метода перемещений.
2. Построить эпюры изгибающих моментов от единичных перемещений и внешней заданной нагрузки с применением таблиц метода перемещений.
3. Составить и решить каноническую систему уравнений.
4. Построить окончательную эпюру изгибающих моментов и сравнить ее с эпюрой, полученной по методу сил.
Составить основную систему метода перемещений.
Определить степень кинематической неопределимости ЗРС, назначить систему дополнительных связей
Назначение дополнительных связей проводится в два этапа:
Первый этап: во все жесткие узлы ЗРС, кроме опорных вводятся связи, запрещающие передачу через эти узлы изгибающего момента (см. рис. 2).
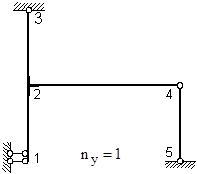
Рис. 2. Жесткие узлы ЗРС
Второй этап: выявляются линейные степени свободы, которые обеспечивают совместную работу балок за счет передачи поперечных сил
- строится вспомогательная расчетная схема путем отбрасывания связей, запрещающих поворот во всех жестких узлах ЗРС, включая опорные (см. рис. 3);

Рис. 3. Вспомогательная расчетная схема
- для этой вспомогательной расчетной схемы определяют степень статической неопределимости системы
 ,
,
следовательно, для образования основной системы метода перемещений необходима одна линейная связь;
- выясняют, каким образом необходимо закрепить на плоскости ВРС, чтобы она стала геометрически неизменяемой; для этого каждый узел ВРС перемещают по горизонтали и по вертикали и устанавливают линейную связь в направлении возможного перемещения (см. рис. 4);

Рис. 4. Возможное перемещение ВРС
- в основной системе метода перемещений в направлении возможного линейного перемещения устанавливается линейная связь (см. рис. 5).
Выбор основной системы метода перемещений

Рис. 5. Основная система метода перемещений
ЗРС с введенными дополнительными связями образует основную систему метода перемещений (см. рис. 5). Из данных рис. 5 следует, что для создания ОСМП потребовалась одна угловая и одна линейная связи. Следовательно, степень кинематической неопределимости ЗРС равна двум:
 .
.
Назначение заменяющей системы однопролетных балок
Полученную ОСМП разбивают на однопролетные бесконсольные балки (см. рис. 6).

Рис. 5. Заменяющая система однопролетных балок
Построение эпюры изгибающих моментов от единичных перемещений
и внешней заданной нагрузки с применением таблиц метода перемещений
Применяя стандартные эпюры метода перемещений (см. приложение), построим и найдем числовые значения единичных эпюр в ОСМП.
 ;
;  ;
;  ;
;
 ;
; 
 .
.

Рис. 6. Схема деформирования и эпюра изгибающих моментов от  .
.
 ;
;  ;
;  ;
;
 ;
;  .
.

Рис. 7. Схема деформирования и эпюра изгибающих моментов от  .
.
Применяя стандартные эпюры метода перемещений (см. приложение), построим и найдем числовые значения грузовой эпюры в ОСМП.
 ;
;  ;
;  ;
;
 ;
;
 ;
;  ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 .
.

 ;
;
 ;
;
 .
.
______________________________
Контроль:  .
.

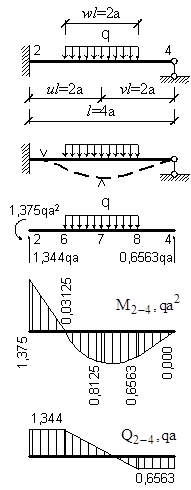
Рис.8. Схема деформирования и эпюра изгибающих моментов от действия внешней заданной нагрузки в ОСМП