




Размеры опасных зон для вантажопідє'мних машин зависят от вылета стрелы и высоты груза, который поднимается.

Рисунок 4, 5. 1 - Схема для определения опасной зоны стрілового крана
Опасную зону для стрілового крана можно определить по схеме на рис. 1. Радиус предела опасной зоны R состоит из радиуса вращения (вылету) стрелы r и расстояния отлета конструкции, которую поднимаем при ее падении S,:
R = r + S (4, 5. 1)
за формулой величина
 , (4, 5. 2)
, (4, 5. 2)
где h - высота подъема конструкции, м;
l - длина ветки срока, м;
α - расстояние от центра тяжести конструкции к ее краю (за большей боковой стороной), м;
φ - угол отклонения ветки стропа от вертикали.
Опасная зона для башенного крана - это пространство, в котором выполняются рабочие и холостые перемещения крана в целом и отдельных его элементов (рис. 2).


Рисунок 4, 5. 2 - Схема для определения опасной зоны при работе башенного крана
Ширина опасной зоны 2 R (см. рис. 2) определяется также как и для стрілового крана, вылетом стрелы r и расстоянием отлета конструкции от вертикали S (R = r + S). Длина опасной зоны L зависит от длины подкрановой колеи l:
L = 2 R + l (4, 5. 3)
По высоте опасная зона определяется как сумма высот подъема крана при минимальном вылете стрелы h и расстояния от предельно-поднятого крюка оголовка встретили α:
Н = h + α (4, 5. 4)
При монтаже и демонтаже батистового крана опасная зона может быть определена по схеме на рис. 3. При этом: α1 - размер башенного крана в горизонтальном положении; α2 - длина звена подкрановой колеи.

Рисунок 4, 5. 3 - Схема для определения опасной зоны при монтаже башенного крана
Опасная зона при работе экскаватора, оборудованного прямой лопатой, определяется со стороны копания суммой радиуса копания R и расстояния от верха забоя к линии естественного укоса почвы в (Rо = R + в), а с противоположной стороны (со стороны разгрузки почвы) - радиусом копания R (рис. 4).
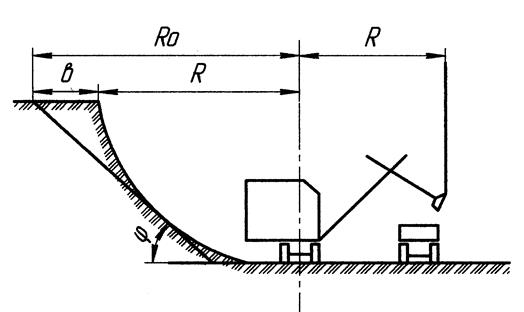
Рисунок 4, 5. 4 - Схема для определения опасной зоны при работе экскаватора оборудованного прямой лопатой (φ - угол естественного укоса)
Опасные зоны существуют также и у стационарных машин и механизмов. Они возникают при вращении и движению незапертых узлов и деталей, например, в зубчатых передачах, в ремінях между шкивом и ремнем, у лебедушек между барабаном и наматываемым тросом и другое. Улучення в эти опасные зоны конечностей тела человека приводит к тяжелым увечьям.
4, 5. 2 Опасных условия эксплуатации землеройных и транспортных машин и механизмов
При разрабатывании выемок и устраивании насыпей землеройные машины нередко работают в условиях, вызывающих потерю их стойкости. На работающую землеройную машину действуют две группы сил: тех, которые стремятся перевернуть машину и удерживающих ее в стойком положении. Стойкость будет обеспечена при условиях, если сумма удерживающих моментов Муд. будет превышать сумму переворачивающих моментов Мпер., обо Муд. >Мпер. Для обеспечения стойкости вводят коэффициент стойкости
Кс = (4, 5. 5)
Для каждого из возможных состояний машины (рабочего, нерабочего, монтажного и транспортного) определяют свой коэффициент стойкости. Небеспечность переворачивания машины особенно большая, если она работает или свободно передвигается на площадках по недопустимому продольному или поперечному склону.
Схема для расчета стойкости бульдозера, работающего на горизонтальной площадке, показанная на рис. 5.
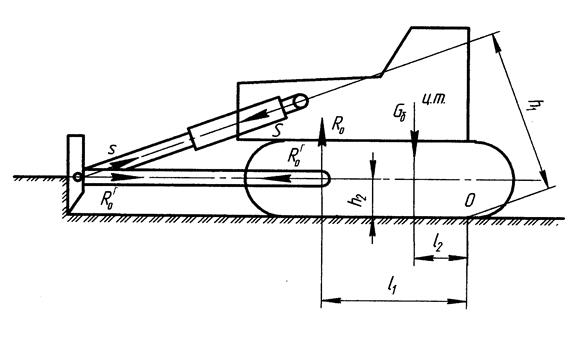
Рисунок 4, 5. 5 - Схема для расчета стойкости бульдозера
Наибольший переворачивающий момент, действующий на бульдозер, возникает в момент встречи отвалу с препятствиями и при невозможности его углубления. Переворачивающие моменты в таком случае будут осуществляться силами, действующими гидравлических цилиндров в направлении против часовой стрелки (по отношению к точке переворачивания 0)
Сумма переворачивающих моментов:
Мпер = 2 ·S ·h1 + 2· Roz · l1 (4, 5. 6)
И сумма удерживающих моментов:
Муд = Gб ·l2 + 2· Roг · h2 (4, 5. 7)
где S - сила, действующая на бульдозер от гидравлического цилиндру, Н;
Roz, Roг - вертикали и горизонтали, действующие на бульдозер при встрече с препятствием, Н;
Gб - масса бульдозера, кг;
l1, l2, h1, h2 - плечи относительно точки переворачивания О, на которые действует на бульдозер удерживающая и переворачивающая силы, г.
Коэффициент запаса стойкости для бульдозеров, перемещаемых, стоячих или работающих на заключениях, принимают ровным 1,5. При необходимости работы на площадках, которые имеют недопустимые склоны, стойкость бульдозера можно обеспечить зацеплением за второй, который стоит на горизонтальной площадке.
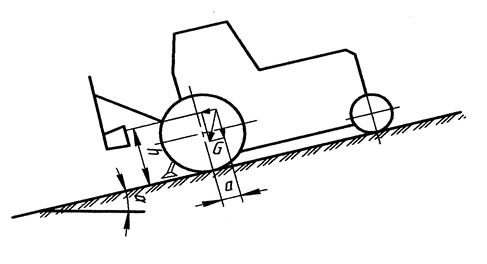
Для обеспечения поперечной стойкости скрепера при работе на склоне (рис. 6) необходимо, чтобы максимально допустимый угол склона к горизонту не превышал бы величину:
 , (4, 5. 8)
, (4, 5. 8)
где В - поперечная база задних колес скрепера, м;
h - расстояние от центра тяжести скрепера к площадке, г.

Рисунок 4, 5. 6 - Схема для расчета поперечной стойкости скрепера
Среди экскаваторов, которые применяются в дорожном строительстве, наименьшую стойкость имеют одноковшовые полуоборотные экскаваторы на пневматическом руссе. Провіряють их стойкость при остановке на подъеме, поперечную стойкость и стойкость из грузом при максимальном вылете ковша по схемам, поданных на рис. 7.
а)

б)
в)
Рисунок 4, 5. 7 - Схема для расчета стойкости одноковшовых полуоборотных экскаваторов
Максимальный угол схиленості площадки к горизонту (рис. 7, а), при котором стоячий экскаватор еще хранит стойкость
 (4, 5. 9)
(4, 5. 9)
При руссе экскаватора к верху по наклону максимальное значение опасного угла наклона α можно определить с помощью формул:
 (4, 5. 10)
(4, 5. 10)
или

 , (4, 5. 11)
, (4, 5. 11)
где G - вес экскаватора, Н;
Мр - реактивный момент на задних ведущих колесах, Н·м;
Мд - крутячий момент двигателя, Н·м;
Iт - предельное число трансмиссии;
ηт - коэффициент полезного действия.
Опасный угол наклона площадки, забезпечуючий поперечную стойкость экскаватора:
 , (4, 5. 12)
, (4, 5. 12)
где с - наименьшее расстояние от центра тяжести к вертикальной плоской, которая проходит через балансир передних колес и вот задних колес, г.
Наименьшее расстояние определяется по схеме на рис. 7, бы за формулой:
 , (4, 5. 13)
, (4, 5. 13)
где В - база задних колес, м;
L - расстояние между осями задних и передних колес, г.
Экскаватор может опрокинуться при установленных выносных опорах вокруг опоры О (рис. 7, в). Переворачивающий момент, который образуется с помощью груза в ковше Gr и весы рабочего екскаваційного оборудования Gр,:
Мпер = Gr (l - n) + Gр (m - n) (4, 5. 14)
где l - максимальный вылет ковша, м;
m - расстояние от оси задних колес к направлению действия силы, м;
n - расстояние от вертикальной плоской, которая проходит через вот задних колес, к точке переворачивания О, г.
Утримующий момент создает вес экскаватора без учета массы рабочего екскаваційного оборудования Gn:
Муд = Gn (е + n), (4, 5. 15)
где е - расстояние от оси задних колес к направлению действия силы Gn, м
Грузова стойкость будет обеспечена, если коэффициент грузовой стойкости экскаватора равняется не меньше 1,15:
 (4, 5. 16)
(4, 5. 16)
По этой же методике определяют стойкость экскаваторов других марок оборудованных прямой и обратной лопатой.
Экскаваторы продольного копания рассчитываются на стойкость в рабочем и транспортном положениях. Переворачивающие моменты при этом создаются весом ковшовой рамы с почвой и без почвы и усилием копания (рис. 8).
а)

б)
Рисунок 4, 5. 8 - Схема для расчета стойкости экскаватора продольного копания в рабочем и транспортном положениях
В транспортном положении коэффициент стойкости
 (4, 5. 17)
(4, 5. 17)
и в рабочем состоянии
 , (4, 5. 18)
, (4, 5. 18)
где и - вес экскаватора соответственно в транспортном и рабочем состоянии без учета веса ковшовой рамы, Н;
 и - вес ковшовой рамы соответственно в транспортном и рабочем состоянии (без веса грунта и с весом грунта, который находится в ковшах рамы), Н;
и - вес ковшовой рамы соответственно в транспортном и рабочем состоянии (без веса грунта и с весом грунта, который находится в ковшах рамы), Н;
Рр - усилие копания, Н;
 - - плечи приложения соответствующих усилий относительно точки переворачивания О, г.
- - плечи приложения соответствующих усилий относительно точки переворачивания О, г.
Коэффициент стойкости экскаватора поперечного копания в транспортном и рабочем положениях принимают Ку 1,3 ÷1,4.
Аналогично изложенным методом проводится расчет стойкости остальных землеройных и транспортных машин, примененных при строительстве автомобильных дорог.
Контрольные вопросы к лекции:
1. Общее положение о причинах производственного травмирования.
2. Травматизм при работе дорожно-строительных машин.
3. Расчет опасных зон для стрілового крана.
4. Расчет опасной зоны для башенного крана.
5. Определение опасной зоны при работе экскаватора.
6. Расчет стойкости бульдозера.
7. Расчет поперечной стойкости скрепера.
8. Расчет стойкости одноковшового экскаватора.
9. Расчет стойкости экскаватора продольного копания.
ЛЕКЦИЯ № 6, 7. СТОЙКОСТЬ МОНТАЖНЫХ МАШИН И МЕХАНИЗМОВ
Основной опасностью при эксплуатации монтажных машин и механизмов, которые применяются в дорожном строительстве, является возможность их переворачивания. Особенно большая эта опасность при работе машин на площадках, где есть склоны. Машины могут перевернуться при поднимании груза, от загублення собственной стойкости, а также при монтаже, демонтаже и транспортировке.
Случаи переворачивания монтажных машин и механизмов почти всегдашний приводят к тяжелым несчастным случаям и к большим материальным затратам.
В соответствии с Правилами устраивания и безопасной эксплуатации грузоподъемных кранов Держгортехнаглядом Украины, условиями обеспечения стойкости машин и механизмов при работе, монтаже, демонтаже и транспортировке являются во всех случаях превышения удерживающего момента Муд над переворачивающим моментом Мпер (Муд > Мпер). Гарантия стойкого положения определяется значением коэффициенту стойкости:
 (6.1)
(6.1)
Самоходные стрілові краны в дорожном строительстве часто работают на площадках, которые имеют наклон. В этом случае самим неблагоприятным (в понимании стойкости) является положение, показанное на рис. 4.1. По рис. 4.1, а рассчитывают грузовую стойкость крана, а по рис. 4.1, бы - собственную стойкость.
а)
б)



Рисунок 6, 7. 1 - Схема для расчета самоходного стрілового крана.
Грузовую стойкость самоходного стрілового крана проверяют за формулой:
 (6.2)
(6.2)
Собственную стойкость крана проверяют за формулой:
 (6.3)
(6.3)
В предыдущих формулах приняты следующие обозначения:
К1 - коэффициент грунтовой стойкости;
К2 - коэффициент собственной стойкости;
G - вес крана, н;
Gпр - вес стрелы и стрілового оборудования, приведенный к главной стреле, н;
Q - вес наибольшего рабочего груза, н;
l - расстояние от оси вращения крана к центру тяжести подвешенного наиболее рабочего груза при установлении крана на горизонтальной площадке, м;
а - расстояние от плоской, которая проходит через вот вращение к центру тяжести подвешенного наибольшего рабочего груза при установлении крана на горизонтальной плоской (при расположении стрелы перпендикулярно ребру переворачивания а = l), м;
b - расстояние от оси вращения к ребру переворачивания, м;
c - расстояние от плоской, которая проходит через вот вращение крана параллельно ребру переворачивания к центру тяжести крана, м;
H - расстояние от головки стрелы к центру тяжести подвешенного груза (принимаем, что центр тяжести располагается на уровне земли), м;
h - расстояние от головки стрелы к плоской, которая проходит через точки опорного контуру, м;
h1 - расстояние от центра тяжести к плоской, которая проходит через точки опорного контуру, м;
V - скорость подъема груза, м/с;
V1 - скорость движения крана, м/с;
V2' - скорость горизонтального движения оголовка стрелы, м/с;
V2'' - скорость вертикального перемещения оголовка стрелы, м/с;
n - количество оборотов крана в 1 мин.;
t - время неустановленного режима работы механизма подъема (пуск торможения), с;
t1 - время неустановленного режима работы механизма перемещения (пуск торможения), с;
t2 - время неустановленного режима работы механизма изменения вылета стрелы (пуск торможения), с;
t3 - время неустановленного режима работы механизма поворота крана (пуск торможения), с;
W - тиснение ветра, который действует перпендикулярно ребру переворачивания и параллельно плоского, на котором установлен кран, на подветренную площадку крана, н;
W1 - тиснение ветра, который действует перпендикулярно ребру переворачивания и параллельно плоского, на котором установлен кран, на подветренную плоскость груза, н;
W2 - тиснение ветра, который действует перпендикулярно ребру переворачивания и параллельно плоского, на котором установлен кран, на подветренную площадку крана, н;
Р, Р1, Р2 - расстояние от плоской, которая проходит через точки опорного контуру к центру приложения ветрового груза, м;
α - угол наклона крана (угол дороги);
g - ускорение силы тяжести;
члены и учитывают при проверке грузовой стойкости в направлении перемещения крана, если он предназначен для перемещения с грузом;
член учитывается при проверке грузовой стойкости крана со стрелой, которая расположена под углом 45 0 к ребру переворачивания.
Стойкость крана гарантируется при К1>= 1,15 и К2>= 1,15.
Приведенные формулы применяются и для проверки стойкости башенного крана в соответствии с расчетными схемами, которые показаны на рис. 6.2. Расчет грузовой стойкости выполняется при максимальном вылете стрелы, собственной стойкости - при минимальном вылете стрелы.
а)
б)




Рисунок 6, 7. 2 - Схема для расчета башенного крана на грузовую(а) и собственную (б) стойкость
Для монтажных механизмов нередко применяются лебедки. Во время их эксплуатации существует небеспечность переворачивания или сдвига. Поэтому лебедки для обеспечения безопасности закріпляють с помощью якорей - горючих из одною или двойной противовесами или углублениях горизонтальных (Рис. 6.3).
а)
б)
в)
 |
Рисунок 6, 7. 3 - Схема для расчета лебедок на стойкость
Расчет лебедки на стойкость возводят к подбору груза противовесы при разных вариантах напрямую усилие S. Если усилие направленно горизонтально, то расчет ведут за рис. 4.3, а. Переворачивающий момент будет создавать усилие S:
Мпер = S · a. (6.4)
Удерживающий момент создает вес противовеса Q и вес лебедушки G:
Мут = Q · b + G · c. (6.5)
При расчете допускается, что переворачивание возможно около точки А. Следовательно, коэффициент стойкости:
 (6.6)
(6.6)
Приняв Кс = 1,5 одержимо вес противовеса, который гарантирует безопасность,:
 (6,7)
(6,7)
При направлении усилия S доверху под углом α к горизонту может случиться, что противовес, который устанавливается на заднюю часть лебедки не будет обеспечивать безопасность при работе, потому что лебедка может перевернуться. В этом случае необходимо устанавливать дополнительно противовес в передней части лебедки (рис. 4.3, б). Переворачивающий момент (при переворачивании около точки В) равняется:
Мпер = S · b. (6,8)
Удерживающий момент рассчитывается:
Мут = Q · d + G · b + S2 · a + Q1 · c. (6,9)
При Кс вес дополнительного противовеса может быть определен за формулой:
 (6,10)
(6,10)
где S1 = S · sinα; S2 = S · cosα.
При больших усилиях S принимаются деревозаземлюючий (рис. 4.3, в) или другой углубляющий якорь. Расчет таких якорей сводится к определению их размеров и веса в зависимости от силы трения о почву и реакции почвы на переднюю упорную часть якоря.
6, 7. 1 Подбор и расчет такелажных приспособлений
Безопасность поднятия и временного закрепления строительных конструкций и изделий часто зависит от способа захвата и крепления груза, предназначенного для поднимания и установки. Правильно сконструированное поднимающая оснастка должна обеспечивать удобство захвата и освобождения конструкций, их сохранения при перемещениях и полную беспечность подъемно-транспортных и монтажных работ.
Такелажная оснастка в виде грузово-захватных устраиваний и приспособлений, предназначенных для подъема временного закрепления и обвязывания грузов, которые поднимаются и перемещаются машинами, при монтаже, грузе и разгрузке. В комплекс такелажных приспособлений входят грузовые крюки, карабины, скобы, восторги, стропы, траверзы и др. Все такелажные приспособления можно классифицировать по взаимодействия с грузами, которые поднимаются и перемещаются, на следующие группы:
1. підтримуючі (восторги и удерживающие груз за выступающие части - выступления, зазоры, кольца, петли);
2. затягиваемые (охватывание груза гибкими элементами);
3. притягивающие (принцип электромагнита или протягивания груза к рабочему органу за счет приспособления вакуума);
4. зачіплювані (зачіплювання грейферними или ковшовыми восторгами).
Более простым грузово-захватным приспособлением является двохвітковий строп, который применяется для подъема конструкций и изделий за приваренные или замурованные петли (рис. 6, 7. 4).


Рисунок 6, 7. 4 - Схема двухвітвевого стропа
Строп отбирают за грузоподъемностью и длине веток. Вантажо-підйомність каждой ветки определяют по разрывному усилию, которое принимается по результатам испытаний или по справочнику. В общем случае вантажо-підйомність ветки должна обеспечивать условия:

(6.11)
где Р - разрывное усилие канату, н;
S - наибольшее натяжение ветки стропа, н;
K - коэффициент запаса, который принимается в зависимости от назначения стропа (К = 6,0 для стропов, прикрепленных к грузу с помощью крюков, карабинов, а также обгинаючих груз при массе его более 50 т; К = 8,0 для стропов, обгинаючих груз при массе его менее 50 т).
Усилия в каждой ветке двохвіткового стропа рассчитывают за формулой:
 (6.12)
(6.12)
где Q - вес груза, который поднимается, н;
α - угол отклонения ветки от вертикали.
При произвольном количестве веток в стропе усилия в ветке определяется соотношением:
 (6.13)
(6.13)
где m - количество веток в стропе
n - коэффициент, который зависит от угла наклона стропа
| α | ||||
| n | 1,15 | 1,42 | 2,0 |
По справочникам в зависимости от усилий, которые возникают в ветках строп, подбирают необходимый диаметр канату.
Длина веток стропа зависит от угла наклона ветки от вертикали, максимальное значение которого не должно превышать 600.
Длина веток равняется:
 (6.14)
(6.14)
где b - расстояние между петлями (городами заціплення груза), м;
h - расстояние по вертикали от груза, который поднимается, к крюку, м (рис. 6.4).
Присоединения канатов к грузово-увлекательным устраиваниям и соединению концов канатов друг с другом выполняются плетением, устраиванием винтовых зажимов, зажимающих гильз из опресовкою. Соединение двух канатов друг с другом будет обеспечивать надежность при условии, что длина сплітки не менее 40 диаметров канату. Надежность соединения канату с грузово-увлекательным устраиванием (из ковшем или без него) обеспечивается при длине не менее 20 диаметров канату. Количество зажимов в местах соединения рассчитывается, но в любом случае его не должно быть менее трех.
В некоторых специфических условиях (например, при подъеме грузов с острым углом, горючих грузов и др.) по условиям безопасности невозможно применять канатные стропы. Цепные стропы бывают один, двох-, трех- и чотиривітковими. Усилия в ветках находят аналогично тросовым стропам. Диаметр цепного прутика d определяют за формулой:
 (6,15)
(6,15)
где S - сила, которая действует на ветку стропа, н;
σ - допустимое напряжение на растягивание, Па.
Коэффициент запаса по грузоподъемности для цепных стропов принимают ровным 5.
Цепные стропы в сравнении с тросовым надежным в эксплуатации, но более тяжелые и трудоемкие при ремонте.
В дорожном строительстве находят наибольшее приложение два основных конструктивных типа траверсов, которые работают на выгон (рис. 6.5, а) и на сжатие (рис. 6.5, б).
а)
б)
Рисунок 6, 7. 5 - Расчетные схемы траверсов
Траверсов первого типа рассчитывают как вичіпні элементы. Максимальный вичіпний момент, действующий на траверса, равняется:
 (6.16)
(6.16)
где P - вес груза, н;
l - длина траверса, см.
С другой стороны, максимальный вичіпний момент, который может быть воспринят поперечным перерезом траверса, равняется:
 (6.17)
(6.17)
где W - момент сопротивления, см3;
[σ]b - допустимое сопротивление на выгон, Па.
Прирівнення правых частей двух формул и решения полученного равенства относительно момента сопротивления
 (6.18)
(6.18)
За найденным моментом сопротивления определяют нужный перерез траверса. При этом надо учитывать коэффициенты перегружу, динамические грузы, условия труда и стойкость при вичіпці.
Траверсов второго типа рассчитывают как сжатые элементы. Сжимающая сила равняется:
 (6.19)
(6.19)
Поперечный разрез траверса может воспринять сжимающую силу:
 (6.20)
(6.20)
где F - площадь поперечного разреза, см3;
[σ]с - допустимое сопротивление на сжатие, Па.
Приравнивая правые части этих формул и рассчитывая полученное равенство относительно площади поперечного разреза, получим:
 (6.21)
(6.21)

