




Введение
Актуальность темы.
Современные роботы созданы для замены человеческого труда, как например роботы-пылесосы, таким образом, человек остается в безопасности и с удобствами, а за него работает его «сердечный» друг. Очень многие из роботов не раз спасали жизнь человеку. В Китае роботы ухаживают за инвалидами. В России роботы используются для проведения различных хирургических операций.
Цель работы.
1)Создать работа который будет вычислять площади прямоугольных объектов.
2)Написать программу для нашего робота.
3)Испытать нашего робота и найти погрешности в вычислениях робота.
4)Работать над роботом и дорабатывать его, для более точных результатов.
Объект исследования.
Исследования робототехники, и роботостроения.
Предмет исследования.
Робот «Вычислитель»
Интерес к робототехнике.
Робототехникой я занимаюсь сравнительно недавно, робототехника привлекла меня тем, что ты сможешь воплотить свою хоть и маленькую, но мечту в реальность в этом тебе могут помочь роботы. Робототехника очень увлекательна и очень затягивает, собирая маленькие детали и конструируя роботов у тебя развивается мышление, мелкая моторика, ты начинаешь вглядываться во все мелкие детали чтоб найти нужную. Мне помогает робототехника в каких-то занятиях и в саморазвитии тоже. Я выступаю на многих конференциях и конкурсах, изучаем опыт других людей и учеников разных школ.
Строение робота.
Наш робот сделан из Lego Mindstorms. Lego Mindstorms –это конструкторский набор программируемой робототехники который дает тебе возможность создать собственного робота «Lego», управлять им. Новый набор Lego Mindstorms EV3 содержит всё что нужно для создания любого робота, который может ходить, говорить, двигаться и делать всё что ты захочешь.В комплект EV3 входит программное обеспечения и бесплатные приложения, позволяющие строить, программировать и управлять роботом с помощью планшета, телефона или компьютера.
В нашем роботе установлен модуль EV3 –это модуль третьего поколения, где EV обозначает эволюция, и поэтому модуль получил название EV3.
Модуль EV3 это программируемый интеллектуальный модуль, который работает как мозги и приводит в движение все датчики и моторы, которые подключены к главному модулю.
Наш робот создан для вычисления площадей прямоугольных форм, в нашем роботе используются 2 основных датчика. Это датчик касания и ультразвуковой датчик.
Датчик касания представляет собой специальную кнопку, которая может находиться в двух состояниях - Нажатия или Освобождения. Также, последовательный переход в состояние Нажатие затем "Освобождение", называется: Щелчок и может обрабатываться программой как самостоятельное событие.
Ультразвуковой датчик может выдавать измеренное расстояние в сантиметрах или в дюймах. Кроме режимов измерения расстояния в сантиметрах и дюймах датчик имеет специальный режим "Присутствие/слушать". Ультразвуковой датчик мы пока ещё не используем, но у нас в планах написать программу где этот датчик будет служить для нахождения объёма.
Главные вычисления и формулы
В нашей работе мы сначала определили, что нужно нам для определения
нужных расчётов
1) Форма робота, в котором должны были стоять детали и датчики в том числе,
они должны стоять в определённых местах.
2) Определили, что нужно применить для нужных вычислений, а так как цель работы была вычислить площадь комнаты, то мы использовали следующие формулы:
длина окружности –L
площадь прямоугольника-S
L=2ПR=П, S=a*b (где a и b это стороны прямоугольника)
(Смотрите приложение№1)
3)В нашем проекте
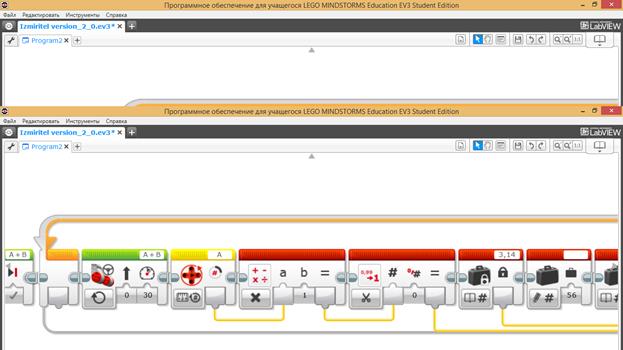
чтобы найти длину пройденной стороны, мы сосчитали длину окружности колеса и подсчитали число оборотов колеса одной из сторон прямоугольника. Таким образам формула получилась такой: N*l=L, получается длину окружности умножили на число оборотов колеса по одной из сторон.
Это отображено в компьютерной программе в этом блоке.
(смотрите в приложении№ 2)
Вторая сторона вычисляется таким же образам.
Результаты фиксируются и выводятся на экран. Вычисленная площадь прямоугольника переводится из кв. мм. в метры кв., в одном кв. метре 1000000 кв. мм.
Наш робот подходит для измерения больших площадей, ведь у нашего робота есть не большая погрешность от 4 до 10 сантиметров. И на коротких дистанциях это существенная разница, а на длинных это не существенно, но и на длинных дистанциях есть погрешности в измерения, ведь робот может немного поехать в бок и расчеты будут не совсем верны, но близки к истинным
Заключение
Мне очень нравится заниматься робототехникой, ведь за роботами будущее, Я хочу, как можно больше помочь и изобрести всяких роботов которые будут полезны для человечества, я бы хотел чтоб роботы заменили человека в некоторых профессиях.Например такая профессия как минёр, ведь у человека всего одна жизнь!
Литература
А. С. Воротников, А. Е. Кобринский
Электронные ресурсы
https://www.lego.comru-ru/mindstorms/
Приложение
1)

2)
Содержание
Введение …………………………………………………….
§1.Интерес к робототехнике………………………………………...
§2.Строение робота……………………………………………………………
§3.Главные вычисления и формулы
Заключение……………………………………………………………………..
Литература………………………………………………………………………
Приложение………………………………………….

