




/Elektroprivod 189/
Рассмотрим в качестве примера процесс изменения тока во времени при подаче напряжения
на обмотку возбуждения. Процесс описывается дифференциальным уравнением

приводя который к нормализованному виду, получим:

где Iуст установившееся значение тока возбуждения, или в операторной форме, заменяя символ дифференцирования d/dt на оператор р

Решение этого уравнения будет
 .
.
При Iнач=0:


Рис.8.2. – Переходные хар-ки при включении обмотки возбуждения
Переходная характеристика i = f(t) носит экспоненциальный характер (рис.8.2,б). За время, равное Тэ, ток в обмотке возбуждения возрастает до значения 0,63*Iycт; за время 3Тэ – до значения 0,95*Iycт; за время 5Тэ – до значения 0,996*Iycт, Практически можно считать, что время ПП-са при экспоненциальном хар-ре составляет 3-5 постоянных времени.
Лекция 32
Формирование переходных процессов пуска, торможения и реверса при линейном изменении управляющего воздействия на скорость э-опривода. Примеры э-оприводов, реализующих эти переходные процессы.
(teoriya_elektroprivoda_2- 302стр.) В замкнутых системах регулируемого э-опривода имеется
возможность формировать переходные процессы, достаточно близкие к оптимальным, путем плавного изменения напряжения, подведенного к якорю ДПТ, или частоты тока, протекающего по обмоткам статора АД. Такие переходные процессы протекают при  .
.
Проанализируем их хар-рные особенности. Эти особенности можно проследить, задавшись линейным законом изменения управляющего воздействия  во времени
во времени

При соотношении постоянных m > 2, а при этом, как показывает опыт, влияние э-омагнитной инерции незначительно сказывается на хар-ре рассматриваемых ПП благодаря
плавности изменений управляющего воздействия.
Общие выражения зависимостей и М=f(t) при Тэ = 0 имеют вид:
 (1)
(1)
 .
.
где  .
.
При пуске э-опривода путем плавного подъема управляющего воздействия от нуля до установившегося значения существенное влияние на ПП оказывает хар-р момента нагрузки.
Если нагрузка представляет собой реактивный момент, ПП пуска распадается на два участка,
соответствующих нелинейности этой нагрузки. На первом этапе возрастание 
вызывает линейное возрастание момента короткого замыкания двигателя по закону
 (3)
(3)
но до тех пор, пока Мкз ≤ Мс, скорость остается равной нулю, так как э-опривод заторможен реактивной нагрузкой. Первый этап заканчивается при Мкз= Мс; это условие позволяет с
помощью (3) определить время запаздывания начала движения

На втором этапе движение э-опривода определяется (1) при условиях 
 (4)
(4)
Каждому текущему значению соответствует вполне определенная механическая хар-ка двигателя. Как показано на рис. 4.29,а, в исходном положении двигатель имел хар-ку динамического торможения 1; в конце первого этапа =  ,что определяет хар-ку 2. Момент двигателя на первом этапе нарастал при = 0 до значения Мс, как показано участком
,что определяет хар-ку 2. Момент двигателя на первом этапе нарастал при = 0 до значения Мс, как показано участком
динамической хар-ки (кривая 3 на рис. 4.29,а), совпадающим с осью абсцисс от 0 до М= Мс. Соответствующие зависимости M(t) и  для первого этапа переходного процесса
для первого этапа переходного процесса
показаны на рис. 4.29,5 на участке 0 ≤t≤ tз.

Рис. 4.29. Механические хар-ки (о) и графики ПП пуска (б) при
Для второго этапа начало отсчета времени в (4) в точке t = tз. Перенеся начало координат в эту точку, построим соответствующие (1) прямую  и кривую
и кривую  ,
,
отстоящую от нее на  . Кривая отстоит от кривой по вертикали на отрезок , что определяет суммарный перепад скорости
. Кривая отстоит от кривой по вертикали на отрезок , что определяет суммарный перепад скорости  . В соответствии с (4) момент двигателя на этом этапе нарастает от М = Мс до Мп.уст = Мс +
. В соответствии с (4) момент двигателя на этом этапе нарастает от М = Мс до Мп.уст = Мс +  по экспоненте за время 3Тм. Зависимости
по экспоненте за время 3Тм. Зависимости  , М =f(t), соответствующие второму этапу ПП, позволяют построить динамическую механическую хар-ку 3 на рис. 4.29,а в пределах от = 0 до =
, М =f(t), соответствующие второму этапу ПП, позволяют построить динамическую механическую хар-ку 3 на рис. 4.29,а в пределах от = 0 до =  , где – конечная скорость на втором этапе.
, где – конечная скорость на втором этапе.
Второй этап заканчивается в момент времени t0, когда управляющее воздействие достигает требуемого установившегося значения и его дальнейший рост должен быть прекращен. Двигатель при этом выходит на естественную характеристику 4. Скорость на этом участке нарастает по экспоненте, а момент уменьшается по тому же закону, стремясь к Мс. (рис. 4.29,6). Общее время переходного процесса составляет tпп = t0+3Tм. Обычно Тм «t0, поэтому время переходного процесса определяется временем нарастания напряжения на якоре или частоты
тока статора до установившегося значения (tпп ≈t0).
Рассмотрим процесс реверса э-опривода путем плавного изменения управляющего воздействия, при котором скорость идеального холостого хода изменяется по закону

Если считать момент активным, то определить начальное и конечное значения скорости можно по механическим хар-кам 1 и 2, представленным на рис. 4.30,а. Подставляя в (1)
значения  и учитывая, что ускорении
и учитывая, что ускорении  в 4.76) отрицательно, получаем
в 4.76) отрицательно, получаем

 (5)
(5)
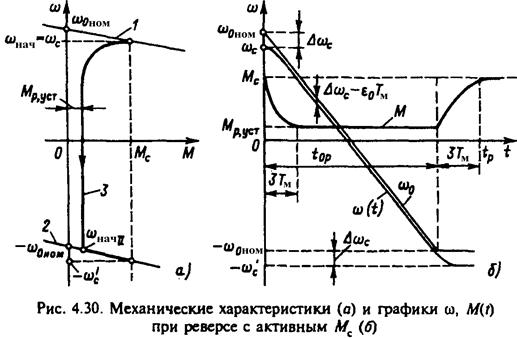
Формулы (5) определяют хар-р изменения скорости и момента на первом этапе реверса, который заканчивается в момент t0р, когда скорость достигает установившегося значения — ном. Соответствующие графические зависимости , M(t) представлены на рис. 4.30,б. Так как в этом процессе ускорение отрицательно, динамический момент  отрицателен
отрицателен
и суммарный установившийся момент при реверсе Мр.уст определяется разностью  . Как следствие, ошибка, с которой скорость следует за изменением , уменьшается:
. Как следствие, ошибка, с которой скорость следует за изменением , уменьшается:  . В зависимости от Мс, и Тм она может быть равной
. В зависимости от Мс, и Тм она может быть равной
нулю ( ) или изменять свой знак (
) или изменять свой знак ( ), при этом и момент двигателя Мр.уст также становится равным нулю или изменяет знак.
), при этом и момент двигателя Мр.уст также становится равным нулю или изменяет знак.
Если  , т. е.
, т. е.  , двигатель в процессе снижения скорости продолжает работать в двигательном режиме, а при изменении знака скорости переходит в тормозной режим с тем же моментом М = Мр.уст. При
, двигатель в процессе снижения скорости продолжает работать в двигательном режиме, а при изменении знака скорости переходит в тормозной режим с тем же моментом М = Мр.уст. При  , т. е.
, т. е.  двигатель при снижении скорости работает в тормозном режиме, а при пуске в противоположном направлении переходит в двигательный режим. Значение момента Мр.уст=
двигатель при снижении скорости работает в тормозном режиме, а при пуске в противоположном направлении переходит в двигательный режим. Значение момента Мр.уст=  = определяет при t= t0р в конце процесса нарастания до значения –
= определяет при t= t0р в конце процесса нарастания до значения –  начальное значение скорости
начальное значение скорости  для заключительного второго этапа реверса. Динамическая механическая хар-ка, соответствующая первому (основному) этапу реверса, показана на рис. 4.30,а (кривая 3).
для заключительного второго этапа реверса. Динамическая механическая хар-ка, соответствующая первому (основному) этапу реверса, показана на рис. 4.30,а (кривая 3).
Второй, заключительный этап реверса протекает при =  = const. На
= const. На
этом этапе момент двигателя нарастает до М =Mс по экспоненте с постоянной Тм, а скорость плавно увеличивается в соответствии с механической характеристикой 2 (рис. 4.30,а) до
установившегося значения —  . Длительность этого процесса примерно равна ЗTМ, что обычно составляет небольшую долю общего времени реверса tр= t0p+ ЗTМ, которое определяется главным образом временем t0p реверсирования управляющего воздействия.
. Длительность этого процесса примерно равна ЗTМ, что обычно составляет небольшую долю общего времени реверса tр= t0p+ ЗTМ, которое определяется главным образом временем t0p реверсирования управляющего воздействия.
Более сложный вид имеет хар-р процесса реверса при реактивном моменте нагрузки. Рассмотрим этот процесс, причем для конкретизации физических представлений будем иметь в виду э-опривод с ДПТ независимого возбуждения, э-омеханические хар-ки которого 1 и
2, соответствующие началу и концу процесса, приведены на рис. 4.31,а. На рис. 4.31,б показана хар-ка uя= Unom -  (прямая 1). В процессе замедления закон движения э-опривода тот же, что и в рассмотренном выше случае активной нагрузке.
(прямая 1). В процессе замедления закон движения э-опривода тот же, что и в рассмотренном выше случае активной нагрузке.

Рис. 4.31. Э-омеханические хар-ки (а) и графики uя, е. iн =f(t) при реверсе с реактивным Mt (б)
Начальная разность между напряжением на якоре uя и ЭДС двигателя Ес= с  , равная падению напряжения на сопротивлении якоря от статического тока
, равная падению напряжения на сопротивлении якоря от статического тока  , уменьшается до
, уменьшается до
значения, равного падению напряжения от установившегося тока при реверсе Iр.уст = Mр.уст/с. Ток якоря при этом соответственно уменьшается от начального значения Iс до Iр.уст и затем остается постоянным до скорости, равной нулю. Зависимости ЭДС двигателя е(г) и iя(t) также приведены на рис. 4.31,б (кривые 2 и З), причем разность между напряжением и ЭДС при Тя= 0 пропорциональна току якоря.
В момент прохождения скорости через нуль реактивный момент нагрузки изменяется скачком от Мс до -Мс. Для того чтобы начался пуск в противоположном направлении, необходимо изменение знака тока и увеличение его по модулю до значений, превышающих модуль статического тока. Появляется пауза в движении, аналогичная времени запаздывания на рис. 4.29,б, которую обозначим tз.р. В течение этой паузы ток якоря нарастает по линейному закону:

а скорость = 0. Пауза заканчивается, когда ток якоря достигает значения Iя= —Iс. Определяем время запаздывания:

В дальнейшем пуск в обратном направлении протекает аналогично рассмотренному выше. Показанные на рис. 4.31, б графики uя(t), e(t) и Iя(t) для этой части процесса (кривые 1— 3) ъ другом масштабе повторяют пропорциональные им графики (t), (t) и M(t) — см. рис. 4.29,б. Динамическая э-омеханическая хар-ка, соответствующая процессу реверса с реактивным моментом нагрузки, построена на рис. 4.31,а (кривая 3).
Если увеличивать темп изменения напряжения duя/dt, то вследствие роста динамического тока при торможении ток Iр.уст= Iс – Iдин вначале уменьшается до нуля, а затем изменяет знак, при этом время запаздывания tз.р уменьшается и при Iр.уст= – Iс становится равным нулю. Из уравнения движения – М — Мс = можно определить значение  ,
,
соответствующее этому условию:
 ,
, 
то процесс изменения скорости при реверсе является непрерывным и влияние реактивного момента сказывается лишь на изменении скачком ускорения при переходе скорости через нуль. Динамическая механическая хар-ка двигателя, соответствующая таким условиям, представлена на рис. 4.31,а (кривая 4).
Лекция 33
1.Энергетика переходных процессов (ПП) в э-оприводах с ДПТ. 2. Потери энергии в э-оприводе при пуске торможении и реверсе. 3. Способы уменьшения потерь энергии в ПП.
1 Определение (moskalenko_v_v_avtomatizirovannyy_elektroprivod – 359 стр; moskalenko_v_v_elektricheskiy_privod – 188стр) энергетических показателей работы э-опривода для переходных режимов является не менее важной задачей, чем для установившегося режима. Определяется это в первую очередь тем, что в переходных режимах протекающие по обмоткам двигателя токи существенно превышают номинальные значения и вызывают повышенные потери энергии, а тем самым дополнительный нагрев двигателя.
Особенно большое значение определение потерь э-оэнергии в ПП-сах имеет для э-оприводов, у которых динамический режим является основным. К таким э-оприводам относятся, например, э-оприводы прокатных станов, подъемных кранов, строгальных станов и т. д.
В общем случае потери энергии за время ПП-са могут быть определены с помощью следующего выражения:
 , (7.34)
, (7.34)
где ΔAK и ΔAv — потери энергии, обусловленные соответственно постоянными и переменными потерями мощности.
Составляющая потерь энергии ΔАК легко может быть найдена в том случае, когда постоянные потери мощности К не изменяются за время ПП-са. В этом случае
 . (7.35)
. (7.35)
Составляющая потерь энергии ΔAv может быть найдена при использовании формул, выражающих переменные потери мощности через электрич. величины — ток и сопротивление,
 . (7.36)
. (7.36)
Использование выражения (7.36) для определения составляющих ΔAv во многих случаях оказывается затруднительным из-за того, что необходимо знать закон изменения токов двигателя в ПП-се i(t), а также располагать данными об изменении R. Т.к. часто зависимость i(t) не выражается аналитически, а в ПП-сах R изменяется, то точное вычисление интеграла (7.36) оказывается затруднительным.
Более удобные расчетные соотношения для определения ΔAv получаются в том случае, если переменные потери мощности ν выражаются через мех-кие величины. Именно такие выражения обычно используются для определения потерь э-оэнергии в ПП-сах.
2. а) Потери энергии при работе нерегулируемых э-оприводов без нагрузки (Мс = 0)
Оговорка: пуск, торможение и реверс может производиться:
а) в холостую и под нагрузкой;
б) при быстрых и медленных (регулируемых) изменениях возмущающего фактора.
Потери в переходных режимах (общий курс эопривода Ильинский)
ПП-сы при быстрых изменениях воздействующего фактора могут сопровождаться большими бросками момента и тока, т.е. значительными потерями энергии. Поставим задачу оценить величину потерь энергии в ПП-сах и найти связи между потерями и пар-рами э-опривода. Будем учитывать только потери в активных сопротивлениях силовых цепей двигателя, т. к. именно эта составляющая общих потерь заметно возрастает в ПП.
Анализ проведем для ПП-сов, когда фактор их вызывающий, изменяется мгновенно, а процесс протекает в соответствии со статическими хар-ми. Потери энергии в цепи ротора или якоря за время ПП-са tпп определяются с учетом того, что потери в роторной (якорной) цепи при любой нагрузке пропорциональны разности скоростей Dw(w0 – w) или скольжению
s = (ω0 – ω)/ω0

т.е. как
 (6.10)
(6.10)
Для ПП-са вхолостую (Мс = 0) будем иметь:
 (6.11)
(6.11)
Подставив (6.11) в (6.10) и сменив пределы интегрирования, получим:
 . 6.12)
. 6.12)
Этот результат универсален, очень прост и очень важен: потери энергии в якорной или роторной цепи за ПП вхолостую (Мс = 0) при «мгновенном» появлении новой хар-ки зависят только от запаса кинетической энергии в роторе при w0 и от начального и конечного скольжений. При пуске вхолостую (sНАЧ =1, sКОН = 0) и динамическом торможении они составят W20 = Jw02/2 при торможении противовключением (sНАЧ =2, sКОН = 1) – 3Jw02/2, при реверсе (sНАЧ =2, sКОН = 0) – 4Jw02/2 = 2Jw02. Ни форма мех-кой хар-ки, ни время ПП-са, ни какие-либо пар-ры двигателя, кроме J и w0, не влияют на потери в роторе.
Для определения потерь энергии при работе двигателей под нагрузкой (Мс≠0) справедлива формула (6.10). Как видно из этой формулы, для определения потерь энергии в якоре ДПТ и роторе АД необходимо знать, каким образом в ПП-сах изменяются скорость двигателя и момент его нагрузки, т. е. располагать зависимостями ω(t) и M(t). Подстановка этих зависимостей в формулу (6.10) и взятие интеграла позволяет решить поставленную задачу. Потери энергии при работе нерегулируемых э-оприводов с нагрузкой определяются ф-лой
 . (7.49)
. (7.49)
В общем виде решение (7.49) затруднено, так как момент нагрузки Мс и скорость w могут быть сложными, в том числе и нелинейными функциями времени. Поэтому ограничимся рассмотрением случая Mc = const, при этом (7.49) принимает вид
 . (7.50)
. (7.50)
Первый член правой части выражения (7.50) представляет собой потери энергии при Мс = 0, а второй и третий члены определяют потери энергии, вызванные наличием момента нагрузки Мс. Для определения ΔW2Н необходимо знать аналитическое выражение для изменения скорости во времени, это позволит точно найти значение интеграла в правой части уравнения (7.50).
Если аналитическое выражение w(t) очень сложное или оно вообще не существует, то для определения интеграла используется графоаналитический метод, что в качестве примера иллюстрирует рис. 7.3.

Рис. 7.3 – К определению потерь энергии в э-оприводе при наличии нагрузки
Очевидно, что интеграл  представляет собой площадь, ограниченную кривой w(t), осью времени и вертикальной линией с абсциссой t = tПП. Из рис. 7.3 также следует, что заштрихованная на рисунке площадь
представляет собой площадь, ограниченную кривой w(t), осью времени и вертикальной линией с абсциссой t = tПП. Из рис. 7.3 также следует, что заштрихованная на рисунке площадь
 , (7.51) что позволяет записать (7.50) в виде
, (7.51) что позволяет записать (7.50) в виде  . (7.52)
. (7.52)
Т. о., для нахождения потерь энергии в роторе АД и якоре ДПТ при Мc=const следует определить потери энергии при Мс = 0, выполнить построение зависимости w(t) и, найдя плошадь Fп определить вторую составляющую потерь в выражении (7.52).
Для оценочных расчетов иногда оказывается допустимым дальнейшее упрощение расчета потерь энергии. Для этого считают, что момент двигателя в ПП-сах не изменяется и равен некоторому среднему моменту Мср, при котором продолжительность ПП-сов остается той же самой, что и при реальном изменении момента двигателя. В этом случае для получения расчетной формулы удобно воспользоваться выражением (6.10), з котором дифференциал времени определяется выражением
dt = – J w0ds/(M±Mc), (7.55)
где знак «–» соответствует процессу пуска, а знак «+» – процессу торможения двигателя. Подстановка (7.55) в (6.10) с одновременной заменой пределов интегрирования и подстановкой М = МСР приводит к следующему выражению:
 . (7.56)
. (7.56)
где Мср —средний, неизменный за время ПП-са момент двигателя.
Выражение (7.56) определяет потери энергии в ПП-сах в роторе АД и якоре ДПТ. Отметим, что в соответствии с (7.56) выделяемые в двигателе потери энергии при его работе при реактивной нагрузке по сравнению с потерями при работе вхолостую увеличиваются в режиме пуска и уменьшаются в режиме торможения [знак «– » в (7.56)]. Это объясняется тел, что при торможении часть запасенной кинетической энергии расходуется на преодоление момента нагрузки, в соответствии с чем в двигателе выделится в виде потерь уже только часть всей кинетической энергии.
Для того чтобы оценить потери энергии в ПП под нагрузкой Мс ¹ 0 (другие условия сохраняются), примем, что Мс = const и М = Мср = const; для пуска графики w(М) и w(t) показаны на рис. 6.4. Тогда Р1 = Мср w0, Р2 = Мср w, D Р = Р1 – Р2 (рис. 6.4), а потери энергии определяется в соответствии с (6.10) заштрихованным треугольником, т.е.

или с учетом tпп = J w0/(Мср – Мс):
 . (6.14)
. (6.14)

Рис. 6.4 – Мех-кие хар-ки и потери энергии при пуске
При торможении нагрузка будет снижать потери:
 (6.15)
(6.15)
3. Из изложенного следуют возможные способы снижения потерь энергии в ПП:
- уменьшение момента инерции за счет выбора соответствующего двигателя и редуктора или за счет замены одного двигателя двумя половинной мощности;
- замены торможения противовключением динамическим торможением или использование мех-кого тормоза;
- переход от скачкообразного изменения w0 к ступенчатому; при удвоении числа ступеней будет вдвое сокращаться площадь треугольников, выражающих потери энергии;
- плавное изменение w0 в ПП-се.
Рассмотрим подробнее последний способ, реализуемый практически в системах управляемый преобразователь – двигатель.
Т.е. основные 2 способа это: 1) уменьшение момента инерции; 2) плавное изменение w0 в ПП-се.
При плавном измененииw0 в ПП-се должны уменьшаться потери энергии. Это иллюстрируется на рис. 6.5, где сравниваются два случая – прямой пуск вхолостую (а) и частотный пуск вхолостую за время t1 >> Tм, т.е. при ускорении ε = ω01/t1 (б) – заштрихованные площади.
При прямом пуске, как уже отмечалось, потери энергии в якорной или роторной цепи определяется площадью заштрихованного треугольника на рис. 6.5,а и составят

При плавном пуске потери определятся площадью заштрихованной на рис. 6.5,б трапеции:
 (6.16)
(6.16)
Отметим, что выражение (6.16), полученное при аппроксимации реальной кривой скорости (см. п. 5.3) прямой линией справедливо лишь при t1 >> Tм; при иных условиях следует использовать более точные модели.
Из изложенного следует, что уменьшая e, т.е. увеличивая время ПП и снижая момент, можно управлять потерями энергии, снижая их до любой требуемой величины.

а) б)
Рис. 6.5– Потери при прямом (а) и плавном (б) пуске
В общем случае, если скорость идеального холостого хода в ПП-се имеет п ступеней регулирования, потери энергии в роторе уменьшатся в п раз
ΔW2 = Jω20n /(2n), (7.60)
где ω0n – максимальная скорость идеального холостого хода ЭД, соответствующая последней ступени.
Потери мощности в якоре ДПТ выражаются следующей общей формулой:
V2 = Мω0 – Мω = Мω0s, (7.37)
где s = (ω0 – ω)/ω0 – относительный перепад скорости ДПТ (скольжение).
Потери энергии согласно (7,36) выразятся как
(7.38)
Исключим из (7 38) время как переменную величин,. воспользовавшись для этого уравнением мех-ого движения. Тогда при Мс = 0
dt = Jdω/M = – Jω0ds/M. (7.39)
Заменим в (7.38) dt согласно (7.39), изменив одновременно пределы интегрирования. Моменту времени t = 0 будет соответствовать s = sНАЧ, а времени tПП – s = sкон. Тогда
 . (7.40)
. (7.40)
Полученное выражение (7.40) удобно для определения потерь энергии, т. к. при пользовании им не требуются зависимости изменения координат э-опривода во времени, а необходимо лишь знание пар-ров J, ω0и значений sнач и sкон.
Определим с помощью (7.40) потери энергии при пуске, реверсе и торможении двигателей.
При пуске двигателей вхолостую ωНАЧ = 0 и ωКОН = ω0, тогда sНАЧ =1, sКОН = 0, в соответствии с чем потери при пуске составят ΔW2 = Jw02/2 (7.41)
Важно отметить, что численно потери энергии равны запасу кинетической энергии, которая будет запасена к концу пуска в движущихся механических частях э-опривода.
При динамическом торможении потери энергии также определятся выражением (7.41), т. е.
ΔW2 – ΔW2дт. При динамическом торможении весь запас кинетической энергии превращается в потери энергии, выделяемые в двигателе в виде тепла.
Если в АД пренебречь током намагничивания и считать, что I1 = I2/ то
 Тогда
Тогда  а общие потери энергии в АД при этих условиях составят
а общие потери энергии в АД при этих условиях составят
 (6.13)
(6.13)
Любой процесс передачи и преобразования энергии сопровождается ее потерями, т.е. входная мощность Рвх всегда больше выходной Рвых на величину потерь DР, и очень важно, сколь велики эти потери.
Энергетическую эффективность процесса оценивают посредством коэффициента полезного действия (КПД), определяемого как
 (6.1)
(6.1)
Важными энергетическими хар-ками изделия – двигателя, преобразователя, редуктора или э-опривода в целом – служит номинальный КПД

 (6.2)
(6.2)
где Рн, DРн – номинальная выходная мощность и номинальные потери,
и зависимость КПД от относительной нагрузки h = f(P/Pн); для регулируемого электропривода часто удобно использовать зависимости h = f(w) при заданном моменте.
В случаях, когда в линии, питающей э-опривод, напряжение и ток не совпадают по фазе и имеют несинусоидальную форму, используется еще одна энергетическая хар-ка – коэффициент мощности, определяемый как
 (6.3)
(6.3)
где Р – активная мощность;
n = I/I(1) – коэффициент искажений;
U, I, I(1) – действующие значения напряжения, тока, первой гармоники тока;
j(1) – угол сдвига между первыми гармониками напряжения и тока.
При небольших искажениях n» 1, т.е.
c» соsj (6.4)
При передаче по линии с некоторым активным сопротивлением Rл активной мощности Р при cosj ¹ 1 потери DР~ вырастут в сравнении с потерями при передачи той же мощности постоянным током DР= в отношении

Оценки энергетической эффективности э-опривода вида (6.1) справедливы, как отмечалось, лишь, если процесс неизменен во времени. Если же нагрузка заметно меняется во времени, следует пользоваться оценками, определяемыми по энергиям за время t:
 и
и 

