




Характеристическое уравнение СП
Рассмотрим математическую модель одноосной силовой СП (2.18), в которой напряжение, приложенное к обмоткам СД, обозначим как
 ,
,
где  – коэффициент усиления,
– коэффициент усиления,  – крутизна датчика угла.
– крутизна датчика угла.
Запишем (2.18) в операторной форме. При этом будем считать, что датчик моментов отключен, т. е.  . Тогда получим:
. Тогда получим:
 (3.1)
(3.1)
Решим уравнение (3.1) относительно  и
и  . Воспользуемся формулами Крамера:
. Воспользуемся формулами Крамера:
 ,
,  .
.
После вычисления определителей  будем иметь:
будем иметь:
 (3.2)
(3.2)
Определитель  из системы (3.2) преобразуем следующим образом:
из системы (3.2) преобразуем следующим образом:

Обозначим:
 ;
;  ;
;  ;
;  ;
;  .
.
Физический смысл величин следующий:  – круговая частота нутационных колебаний;
– круговая частота нутационных колебаний;  и
и  – постоянные времени платформы и кожуха гироскопа с невращающимся ротором;
– постоянные времени платформы и кожуха гироскопа с невращающимся ротором;  – постоянная времени прецессионного движения платформы;
– постоянная времени прецессионного движения платформы;  – коэффициент демпфирования.
– коэффициент демпфирования.
Характеристическое уравнение получим, приравняв  . Пренебрегая малой величиной
. Пренебрегая малой величиной  , получим систему третьего порядка:
, получим систему третьего порядка:
 .
.
Для исследования устойчивости разработана специальная методика – диаграмма Вышнеградского. Необходимо данное уравнение привести к виду
 . (3.3)
. (3.3)
Для этого сделаем замену переменной:  или
или 
 , где
, где  – среднегеометрический корень, который является характеристикой скорости (быстроты) протекания переходного процесса в системе. В автоматике заменой
– среднегеометрический корень, который является характеристикой скорости (быстроты) протекания переходного процесса в системе. В автоматике заменой  можно перейти к новой комплексной переменной.
можно перейти к новой комплексной переменной.
Коэффициенты  и
и  в (3.3) будут иметь вид
в (3.3) будут иметь вид
 ,
,  ,
,  .
.
Условие устойчивости системы:  ,
,  и
и  . Уравнение границы устойчивости:
. Уравнение границы устойчивости:  .
.
Медленное приведение ОСП(Медленное приведение СП; Время медленного приведения
Схема начальной выставки
 Погрешность выставки приводит к погрешностям платформы. Время определяет готовность к работе. Существуют следующие виды выставки: а) быстрое приведение – размыкается цепь обратной связи, маятник управляет двигателем (рис. 8.1); б) медленное (точное) приведение – цепь стабилизации замкнута, управление на ДМ; в) комбинированная.
Погрешность выставки приводит к погрешностям платформы. Время определяет готовность к работе. Существуют следующие виды выставки: а) быстрое приведение – размыкается цепь обратной связи, маятник управляет двигателем (рис. 8.1); б) медленное (точное) приведение – цепь стабилизации замкнута, управление на ДМ; в) комбинированная.
Источниками информации об угловом положении СП могут быть ДУα, автоколлиматоры, гониометрические схемы; маятники, акселерометры, гироинтеграторы, астрокорректоры и др.
Время приведения определяется выражением:
 ,
,
где  – время быстрого приведения;
– время быстрого приведения;  – время первого и второго этапов
– время первого и второго этапов
быстрого приведения соответственно;  – время медленного приведения.
– время медленного приведения.
Медленное приведение
 На этапе медленного приведения замыкается цепь стабилизации и на ДМ подается управляющий момент
На этапе медленного приведения замыкается цепь стабилизации и на ДМ подается управляющий момент  . Если характеристика маятника зависит от
. Если характеристика маятника зависит от  (или используется ДУαдля выставки СП в ее нулевое положение), то получим линейную характеристику с насыщением.
(или используется ДУαдля выставки СП в ее нулевое положение), то получим линейную характеристику с насыщением.
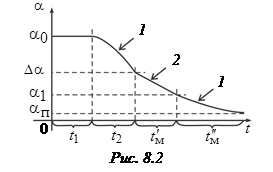
Общий вид  представлен на рис. 8.2, где 1 – экспоненциальная зависимость; 2 – линейная зависимость.
представлен на рис. 8.2, где 1 – экспоненциальная зависимость; 2 – линейная зависимость.
На участке  имеем
имеем  , на
, на  получаем
получаем 
 . Уравнение движения примет вид
. Уравнение движения примет вид
 .
.
Время медленного приведения определяется как
 .
.
На участке  получим
получим  . Обычно
. Обычно  .
.
Время на данном участке находится по формуле:
 ,
,
где  .
.
На участке получим  . Решение имеет вид
. Решение имеет вид
 ;
;
 ,
,
где  .
.
Время приведения платформы в пороговое положение  , при котором
, при котором  , определяется при
, определяется при  . Получим
. Получим
 ;
;  .
.
Откуда определяется время  :
:
 .
.
Движение возможно пока  .
.
[1]Далее в тексте индекс «с» опускается.

