




При заданной скорости передачи данных (длительности передачи символа) влияние МСИ зависит от частотной характеристики канала, определяющей значение времени рассеяния, и спектра излучаемого сигнала, определяющего длительность отклика в приемнике.
В цифровой системе связи спектральную плотность мощности излучаемого сигнала можно формировать путем выбора формы импульса (огибающей посылки, см. гл.4), а также введением корреляции (памяти) посредством кодирования.
Кодирование для формирования спектра сигнала выполняется после канального кодирования. Используемые для этой цели коды обычно называют в литературе модуляционными кодами или кодами перевода данных [38]. Такие коды вводят определенные ограничения на последовательность передаваемых символов, подаваемых на модулятор. Тем самым в сигнал вводится память, которая может быть далее использована при демодуляции (в частности, с помощью алгоритма Витерби).
Более подробно проблема формирования спектра сигнала рассмотрена, например, в [38].
Эквалайзинг
В узкополосных цифровых системах (в частности, в ССМС стандартов GSM и D-AMPS) для компенсации межсимвольных искажений, возникающих за счет многолучевого распространения, может быть использован эквалайзинг (equalizing - буквально выравнивание). Метод предназначен для компенсации разности хода между составляющими при многолучевом распространении, которая приводит к МСИ. По существу эквалайзер представляет собой адаптивный фильтр, настраиваемый таким образом, чтобы сигнал на его выходе был в возможно большей степени очищен от межсимвольных искажений, содержащихся во входном сигнале.
Эквалайзеры, используемые, например, в ССМС стандарта GSM, обеспечивают выравнивание по времени импульсных сигналов при рассогласовании до 16 мкс [25].
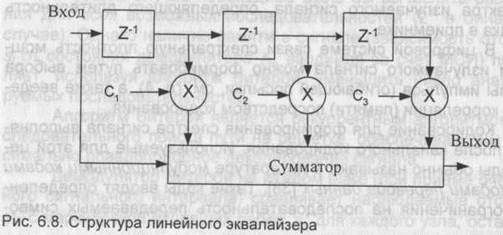
Принцип выравнивания хорошо иллюстрирует схема простейшего линейного эквалайзера с трехэлементной линией задержки, рассмотренная в [13] (рис. 6.8).
Алгоритм работы приведенного устройства достаточно прост. Если на входе фильтра присутствует основной сигнал
|
и его копия, сдвинутая на время г, равное времени задержки сигнала в фильтре, и уменьшенная по амплитуде, то подбором коэффициентов можно добиться, чтобы на выходе фильтра полностью сохранился основной сигнал, а вторая составляющая, представляющая собой помеху, была уменьшена.
Ясно, что такой эквалайзер будет выполнять свое назначение лишь в том случае, когда, кроме основного сигнала, имеется только один дополнительный и его задержка относительно основного сигнала равна времени задержки сигнала в фильтре.
В реальных условиях на вход приемного устройства может поступать большое число сигналов (радиоволн), задержка между которыми неизвестна.
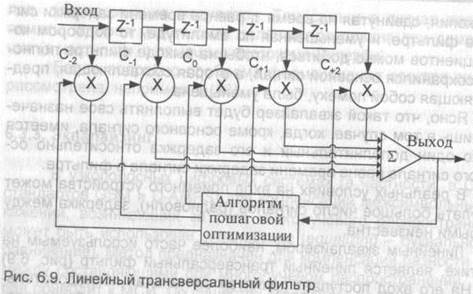
Линейным эквалайзером, наиболее часто используемым на практике, является линейный трансверсальный фильтр (рис. 6.9) L_]. На его вход поступает принятая сигнальная последовательность {Rj}, а выходом являются оценки информационной последовательности {аj}. Оценка K-го символа может быть выражена в виде (6.19)
|
где Cj - весовой коэффициент j-й ячейки фильтра. Решение ак определяется квантованием оценки ак до ближайшего (по расстоянию) информационного символа [38].
Общее количество ячеек фильтра равно 2M+1, где М, как и ранее, означает число дополнительных лучей, создающих МСИ. Это обуславливает линейную зависимость вычислительной сложности эквалайзера от величины временного рассеяния в канале.
В качестве критерия оптимизации наиболее часто используется критерий минимума среднего квадрата ошибки. (6.20)
|
|
В рассмотренной структуре линейного эквалайзера задержка сигнала между ячейками равна длительности символов. Такое построение является оптимальным, если перед эквалайзером имеется фильтр, согласованный с переданным сигналом, искаженным в канале [38]. Если характеристики канала неизвестны, то приемник обычно согласуется с переданным сигнальным импульсом. При этом эффективность выравнивания существенно снижается.
В дробных эквалайзерах используется дискретизация приходящего сигнала с частотой, не меньшей удвоенной ширины спектра сигнала (т.е. задержка между ячейками не превышает времени дискретизации по Котельникову).
Линейные эквалайзеры относительно просты по устройству, однако при больших искажениях сигналов, что характерно для систем мобильной радиосвязи, их эффективность оказывается невысокой [13, 38].
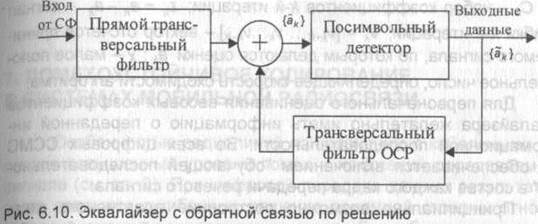
Примером нелинейного эквалайзера является эквалайзер с обратной связью по решению (рис. 6.10). Он состоит из двух фильтров - фильтра прямой и фильтра обратной связи по решению (ОСР). Прямой фильтр идентичен линейному трансверсальному фильтру, рассмотренному выше (рис. 6.9). Фильтр обратной связи имеет на своем входе последовательность решений по предшествующим продетектированным символам (что и обусловливает нелинейность эквалайзера) и используется для устранения в предстоящей оценке части МСИ, вызванной предыдущими символами [38].
Все рассмотренные выше эквалайзеры ориентированы на ситуацию, когда характеристики канала (импульсная, частотная) в достаточной мере известны приемной стороне. Однако для ССМС такая ситуация не характерна. В большинстве случаев характеристики канала априори не известны и, кроме того, не постоянны.
|
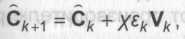
Поэтому эквалайзер должен включать петлю адаптации, чтобы изменения характеристик канала могли быть учтены в процессе работы. На рис. 6.11 представлена схема линейного адаптивного эквалайзера, основанного на критерии минимума среднеквадратической ошибки. Алгоритм подстройки весовых коэффициентов подобного эквалайзера [38]: (6.21)
|
|
где Ск - набор коэффициентов K-й итерации; ек = ак-ак - сигнал ошибки K-й итерации;

|
- вектор отсчетов принимаемого сигнала, по которым делаются оценки ак; х - малое положительное число, определяющее скорость сходимости алгоритма.
Для первоначального оценивания весовых коэффициентов эквалайзера желательно иметь информацию о переданной информационной последовательности. Во всех цифровых ССМС это обеспечивается включением "обучающей последовательности" в состав каждого кадра передачи речевого сигнала.
Принципиально возможно построение адаптивного эквалайзера, не использующего для первоначальной настройки обучающую последовательность ("слепое выравнивание"). Следует отметить, что рассмотренные примеры далеко не исчерпывают все возможные варианты построения эквалайзеров. Более подробно информацию о структурах эквалайзеров, алгоритмах оценивания весовых коэффициентов и эффективности выравнивания можно почерпнуть из [38]. В заключение можно отметить, что эквалайзер не всегда рассматривается как функционально необходимое звено приемника и спецификации, как правило, отдают производителю решение вопроса о его наличии или отсутствии.

