




Принцип действия одноосной СП
Кинематическая схема и принцип действия
Одноосной силовой СП
Одноосной силовой СП называют гироскоп с тремя степенями свободы с сильной (жесткой) межрамочной коррекцией, благодаря которой кожух гироскопа может поворачиваться только на малые углы [2].
 Двух- и трехосные силовые СП обычно можно рассматривать как совокупность двух или трех независимых одноосных СП. Это позволяет, изучив подробно одноосные платформы, перейти к анализу двух- и трехосных с учетом их особенностей [6].
Двух- и трехосные силовые СП обычно можно рассматривать как совокупность двух или трех независимых одноосных СП. Это позволяет, изучив подробно одноосные платформы, перейти к анализу двух- и трехосных с учетом их особенностей [6].
Схема одноосной силовой СП приведена на рис. 1.1, на котором приняты следующие обозначения: 1 – гиромотор; 2 – платформа; 3 – датчик моментов (ДМ); 4, 5 – датчики угла (ДУ); 6 – стабилизирующий двигатель (СД); 7 – усилитель;  – оси, связанные с платформой 2;
– оси, связанные с платформой 2;  – ось стабилизации;
– ось стабилизации;  – ось прецессии;
– ось прецессии;  – угол прецессии;
– угол прецессии;  – угол поворота платформы 2 относительно объекта. На платформе закреплен стабилизируемый объект. Предположим, что относительно оси стабилизации
– угол поворота платформы 2 относительно объекта. На платформе закреплен стабилизируемый объект. Предположим, что относительно оси стабилизации  действует постоянный возмущающий момент
действует постоянный возмущающий момент  . Под действием этого момента гироскоп начинает прецессировать со скоростью
. Под действием этого момента гироскоп начинает прецессировать со скоростью  так, чтобы вектор кинетического момента
так, чтобы вектор кинетического момента  совместился с вектором
совместился с вектором  по кратчайшему пути. При этом величина угловой скорости прецессии
по кратчайшему пути. При этом величина угловой скорости прецессии  находится из выражения
находится из выражения

Благодаря прецессии гироскопа возникает гироскопический момент, определяемый согласно правилу Жуковского: при любом изменении углового положения в пространстве главной оси гироскопа с угловой скоростью возникает гироскопический момент, образующий с векторами и правый трехгранник:
 ,
,  ,
,
где  – угол между векторами и
– угол между векторами и  .
.
Если в начальный момент времени угол прецессии  , то
, то  , т. е.
, т. е.  . Таким образом, возникающий гироскопический момент
. Таким образом, возникающий гироскопический момент  уравновешивает возмущающий момент , обеспечивая тем самым стабилизацию платформы. Отметим, что причиной, вызывающей прецессию, является возмущающий момент , а следствием прецессии – гироскопический момент .
уравновешивает возмущающий момент , обеспечивая тем самым стабилизацию платформы. Отметим, что причиной, вызывающей прецессию, является возмущающий момент , а следствием прецессии – гироскопический момент .
В отсутствие стабилизирующего двигателя 6 прецессия продолжалась бы до совмещения вектора с осью . Однако по мере прецессии гироскоп поворачивается на угол , и с датчика угла 4 начинает сниматься сигнал, пропорциональный углу , который после усиления поступает на стабилизирующий двигатель 6. Последний прикладывает к платформе вращающий момент, который: 1) компенсирует возмущающий момент , прекращая прецессию; 2) уменьшает угол до нуля (межрамочная коррекция). Датчик моментов 3 служит для начальной выставки платформы 2 за счет прецессии вокруг оси стабилизации, а также в штатном режиме для коррекции стабилизированных платформ, т. е. для управления положением платформы в пространстве.
Влияние качки основания на характер движения СП (Влияние вибраций основания на характер движения СП)
Влияние качки основания
Пусть объект совершает по оси  регулярную качку по закону:
регулярную качку по закону:
 (6.1)
(6.1)
Качка (6.1) оказывает влияние на СП через возмущающий момент  :
:
 (6.2)
(6.2)
где  . Если разложить полученную нелинейную функцию
. Если разложить полученную нелинейную функцию  в ряд Фурье, получим [5]:
в ряд Фурье, получим [5]:
 , (6.3)
, (6.3)
где высшие гармоники быстро убывают по амплитуде.
После подстановки (6.3) в (6.2) будем иметь:
В общем виде первую гармонику можно представить как
 . (6.4)
. (6.4)
На рис. 6.1 представлено влияние момента  на
на  . Учет только первой гармоники ошибочен. Можно показать, что погрешность стабилизации определяется не только моментом, но и скоростью его изменения:
. Учет только первой гармоники ошибочен. Можно показать, что погрешность стабилизации определяется не только моментом, но и скоростью его изменения:
 ,
,
т. е. амплитуды высших гармоник не убывают.
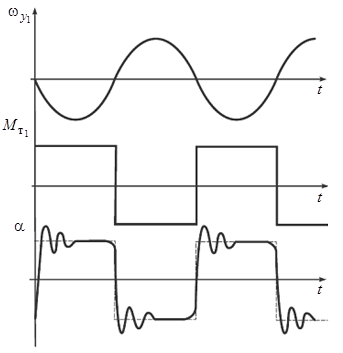
Рис. 6.1
Итак, по оси стабилизации действует периодический возмущающий момент с амплитудой, описываемой выражением (6.4), обусловленный влиянием вязкого и сухого трения и инерционностью СП по оси стабилизации. Данный момент, как и  , должен компенсироваться двигателем, но при этом возникают дополнительные динамические погрешности.
, должен компенсироваться двигателем, но при этом возникают дополнительные динамические погрешности.

