




МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
Федеральное государственное бюджетное образовательное учреждение высшего образования
«тюменский государственный нефтегазовый университет»
ТОБОЛЬСКИЙ ИНДУСТРИАЛЬНЫЙ ИНСТИТУТ (филиал)
Кафедра электроэнергетики
КОНТРОЛЬНАЯ РАБОТА
по дисциплине "Метрология, стандартизация и сертификация"
Вариант № 9
Выполнил: студент
группы ЭСбз-12-1
Тереховой И.А.
Проверил:
Захаров И.Л.
доцент, к.т.н.
Тобольск 2016
Оглавление
1.Физические явления, используемые в резистивных преобразователях. 3
2.Разновидности и особенности конструкции резистивных преобразователей. 4
3.Основные метрологические характеристики измерительных преобразователей. 8
4.Схемы включения преобразователей и расчетные соотношения для них. 9
5. Основные источники погрешностей и методы их компенсации. 13
Выводы.. 17
Характеристики ИП в динамическом режиме. 18
Список литературы.. 25
Физические явления, используемые в резистивных преобразователях
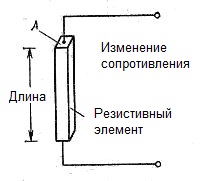
Весьма большим классом измерительных преобразователей являются резистивные преобразователи, принцип действия которых основан на преобразовании значения измеряемой величины в изменение сопротивления. Последнее может быть вызвано различными эффектами в преобразующем элементе, на пример нагреванием или охлаждением, механическим напряжением, воздействием светового потока (как в фотопроводящих преобразователях), увлажнением, осушением, механическим перемещением контактной щетки реостата.
Если через резистивный материал во время изменения измеряемой величины протекает фиксированный ток, то результатом будет изменение напряжения вдоль материала, которое отражает изменение измеряемой величины.
Одним из вариантов резистивного преобразователя является потенциометрический преобразователь, в котором изменение измеряемой величины преобразуется в изменение отношения напряжений вследствие изменения положения контактной щетки на резистивном материале, запитываемом от внешнего источника. Определенный механический элемент преобразует изменение измеряемой величины в перемещение щетки.




Использование простейшего потенциометрического устройства для определения направления вращения вала
Разновидности и особенности конструкции резистивных преобразователей

Реостатные преобразователи основаны на изменении электрического сопротивления проводника под влиянием входной величины — перемещения. Реостатный преобразователь, как показывает само название, представляет собой в простейшем случае реостат, щетка (движок) которого перемещается под воздействием измеряемой неэлектрической величины. На рисунках схематически показаны некоторые варианты конструкций реостатных преобразователей для углового и линейного перемещений. Преобразователь состоит из обмотки, нанесенной на каркас, и щетки. Форма каркаса зависит от характера измеряемого перемещения (линейное, угловое), от вида функций преобразования (линейная, нелинейная) и других факторов и может иметь вид цилиндра, тора, призмы и т. д. Для изготовления каркасов применяются диэлектрики (гетинакс, пластмасса, керамика) и металлы (дюралюминий с анодированной поверхностью).
Проволока для обмотки выполняется из сплавов (сплав платины с иридием (5-30%), константан, нихром и фехраль). Для обмотки преобразователя обычно используется изолированный эмалью или оксидной пленкой провод. После изготовления обмотки изоляция провода счищается в местах соприкосновения его со щеткой.
Щетка преобразователя выполняется либо из проволок, либо из плоских пружинящих полосок, причем используются как чистые металлы (платина, серебро), так и сплавы (платина с иридием, фосфористая бронза, медно-серебряные сплавы и т. д.). Качество контакта щетки и обмотки определяется контактным давлением, которой выбирается в широких пределах от десятых долей грамма до сотых граммов в зависимости от материалов контакта и обмотки и условий работы преобразователя.
Габариты преобразователя определяются значением измеряемого перемещения, сопротивлением обмотки и мощностью, выделяемой в обмотке.
Для получения нелинейной функции преобразования применяются функциональные реостатные преобразователи. Нужный характер функции преобразования очень часто достигается профилированием каркаса преобразователя.
В рассматриваемых реостатных преобразователях зависимости изменения сопротивления от перемещения щетки имеет ступенчатый характер, так как сопротивление изменяется скачками на значении сопротивления одного витка. Это вызывает погрешность преобразования. Максимальная приведенная погрешность при этом у = ΔR/R, где ΔR- максимальное сопротивление одного витка R - полное сопротивление преобразователя.
Иногда применяются реохордные преобразователи, в которых щетка скользит вдоль оси проволоки. В этих преобразователях отсутствует указанная выше погрешность.
Выходной параметр реостатных преобразователей - сопротивление - измеряется обычно с помощью мостовой схемы.
К достоинствам преобразователей относится возможность получения высокой точности, значительных по уровню выходных сигналов и относительная простота конструкции. Недостатки - наличие скользящего контакта, необходимость относительно больших перемещений движка, а иногда и значительного усилия для его перемещения.
Применяются реостатные преобразователи для преобразования сравнительно больших перемещений (угловых, линейных).
Преобразователи механических величин и системы дистанционной передачи.
К механическим параметрам (величинам) относят:
1) линейные и угловые перемещения;
2) механические усилия, деформации, напряжения, моменты и т.д.
Реостатные преобразователи.
Предназначены для преобразования линейных и угловых перемещений в омическое сопротивление.
Достоинства: высокая точность – до 0,05% и высокая мощность.
Реостатный преобразователь – каркас, на который намотана проволока из манганина или константана (из металла с низким температурным коэффициентом сопротивления).
При высоких температурах используется нихром или сплав палладия с вольфрамом.
Отличия от обычного реостата:
· очень тщательная линейная намотка с равномерным шагом;
· материал намотки должен обладать низким температурным коэффициентом сопротивления (ТКС);
· температурные коэффициенты линейного расширения каркаса и проводника должны быть одинаковы.
 х – перемещение, l – длина реостатного датчика,
х – перемещение, l – длина реостатного датчика,
ro- шаг намотки, сопротивление на единицу длины.


Статическая характеристика ступенчатая:
| V |
| R0 |
| RH |


аддитивная погрешность
дискретности

 берут 1/3 полного хода.
берут 1/3 полного хода.
Для a характеристика линейная.
Для получения линейной статической характеристики реостатные преобразователи включают в цепи следящего астатического уравновешивания.

RП – реостат приемник
RД – датчик
На РД будет ноль, когда движки на
сопротивлениях будут находиться в
одинаковом положении.
Реостатные преобразователи представляют собой регулируемые омические сопротивления специального изготовления. Естественной входной величиной реостатного ИП является перемещение (линейное или угловое), выходной - сопротивление.
По конструкции реостатные ИП можно разбить на три группы:
1) реохордные ИП;
2) ИП со ступенчатой характеристикой;
3) нелинейные ИП.
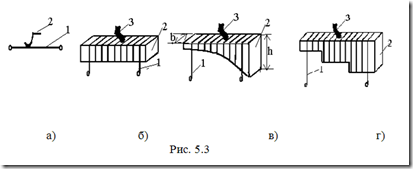
Реохордные преобразователи представляют собой натянутую проволоку 1, по которой перемещается движок 2. Характеристика преобразования такого ИП линейная.
Реостатные ИП со ступенчатой характеристикой выполняются из провода 1 диаметром 0,02 - 0,1 мм, намотанного с равномерным шагом на каркас 2, по которому перемещается подвижная токосъемная щетка 3 (движок) (рисунок 5.3 б).
Число витков реостатного ИП обычно не менее 100.
Каркасы могут выполняться в виде пластин, цилиндра, кольца и др.
Изменение сопротивления реостатного преобразователя при перемеще- нии подвижного контакта достигает 90 % от номинального сопротивления.
Выходное сопротивление R реостатного преобразователя в зависимости от перемещения движка Х может быть определено из выражения
 (5.10)
(5.10)
где R1 - сопротивление одного метра провода; n0- число витков на единицу длины преобразователя; р - периметр каркаса.

|
Нелинейные реостатные ИП можно получить, выбирая соответствующую форму каркаса (рисунок 5.3 в). Например, для получения определенной нелинейной зависимости можно применить фигурные каркасы, сечение которых изменяется по длине, а толщина b каркаса остается постоянной. Для заданной характеристики f(x) переменная высота намотки h этого преобразователя находится по формуле где q - сечение провода; r - удельное сопротивление материала провода.
Нелинейную зависимость позволяют получить преобразователи со ступенчатым каркасом (рисунок 5.3 г). Такое выполнение каркаса обеспечивает кусочно-линейную аппроксимацию требуемой зависимости.
Для изготовления реостатных ИП используются провода из манганина, константана, нихрома, фехраля. Использование микропровода позволяет получить реостатные ИП размером 5 х 5 мм. В ответственных случаях используются провода из сплава платины с иридием (90 % Pt + 10 % Ir). Каркасы выполняются из текстолита, пластмассы, алюминия. Движок (щетка) выполняется либо из двух-трех проволочек из сплава платины с иридием или с бериллием, или в виде пластинчатых щеток из серебра или фосфористой бронзы.

