




Для описания динамических свойств двигателя используем систему уравнений (1), (2), (3), (6), которые после преобразований представим в виде:
u в=(1+ T в p) i в R в,
u я=(1+ T я p) i я R я+ K Φω,
Jd ω/ dt = K Φ i я− M с, (36)
где: p = d / dt – оператор дифференцирования; T в= L в/ R в, T я= L я/ R я – электромагнитные постоянные времени обмотки возбуждения и якорной обмотки соответственно.
Полученную систему уравнений необходимо дополнить уравнением связи потока двигателя с током возбуждения. Как известно из теории электрических машин, из-за влияния насыщения магнитной системы эта связь нелинейная и имеет вид рис. 7. а. С целью лучшего использования железа машина проектируется так, чтобы в номинальном режиме рабочая точка находилась на перегибе кривой намагничивания.
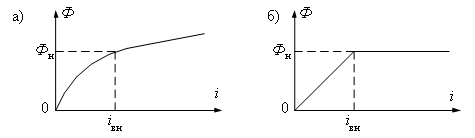
Рис. 7. Реальная и аппроксимированная зависимости потока от тока возбуждения
Для аналитического описания модели заменим реальную кривую намагничивания аппроксимированной (рис. 7. б). Тогда зависимость потока от тока возбуждения можно записать выражениями:
Φ= k 1 i в если | i в|≤| i н|,
Φ=Φн если | i в|>| i н|. (37)
На основании системы уравнений (36) и (37) структурную схему двигателя постоянного тока как динамической системы можно представить в виде рис. 8.
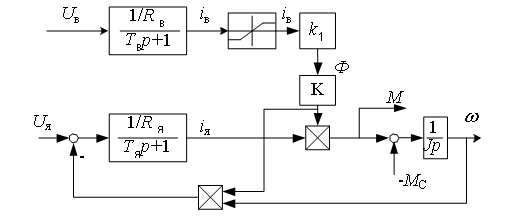
Рис. 8. Полная структурная схема двигателя постоянного тока
как динамической системы
Из структурной схемы можно заключить, что двигатель постоянного тока является существенно нелинейной системой, имеющей два типа нелинейности – ограничение и умножение. Входными координатами, которыми осуществляется управление, являются U я и U в.
На практике чаще всего используют упрощенную модель. Это объясняется тем, что в автоматическом приводе в основном используется якорное управление, более того, все большее применение находят двигатели с возбуждением от постоянных магнитов. При этом поток двигателя можно считать постоянным и структурная схема двигателя получает вид рис. 9.
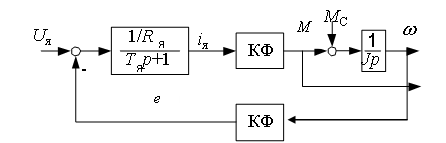
Рис. 9. Структурная схема двигателя при постоянном потоке
Из этой структурной схемы можно найти передаточные функции двигателя
по управлению W 1(p)=ω(p)/ U (p), W 2(p)= M (p)/ U (p)
и по возмущению W 3(p)=ω(p)/ M с(p).
Для этого воспользуемся известными правилами преобразования структурных схем. В результате получим
 (38)
(38)
Назовем T м= JR я/(K Φ)2 механической постоянной времени двигателя и напомним, что k ω=1/(K Φ) – передаточный коэффициент двигателя по управлению при регулировании скорости. С учетом принятых обозначений имеем:
 (39 а)
(39 а)
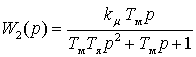 (40 а)
(40 а)
 (41 а)
(41 а)
где k μ= K Φ/ R я – передаточный коэффициент двигателя по управлению при регулировании момента, k в=− R я/(K Φ)2 – передаточный коэффициент по возмущению.
Можно отметить, что полученные ранее коэффициенты k ω и k μ, из выражений (16) и (17) совпадают с их значениями, полученными методом структурных преобразований в настоящем пункте.
По виду передаточных функций можно заключить, что двигатель является динамическим звеном второго порядка.
Известно, что переходные процессы в таком звене будут апериодическими, если корни его характеристического уравнения вещественные, и колебательными, если корни комплексные.
Напомним, что корни характеристического уравнения находятся путем приравнивания нулю знаменателя передаточной функции. Отсюда имеем
 (42)
(42)
С учетом последнего выражения можно отметить, что переходный процесс будет апериодическим, если T м>4 T я.
В противном случае переходный процесс колебательный, что в реальности практически не встречается.
Можно отметить также, что при выполнении условия T м≥10 T я с достаточной степенью точности характеристическое уравнение можно представить в виде произведения двух полиномов, т.е. передаточные функции могут быть записаны в виде
 (39 б)
(39 б)
Запись передаточных функций двигателя в виде (39 б) оказывается удобной при синтезе систем управления приводом.
В некоторых случаях постоянной времени якорной цепи можно пренебречь. Тогда двигатель можно представить динамическим звеном первого порядка, а передаточные функции получат вид:
W 1(p)= k ω/(T м p +1), (39 в)
W 2(p)= k μ T м p /(T м p +1), (40 б)
W 3(p)= k в/(T м p +1). (41 б)
По структурной схеме двигателя (рис. 9) можно также составить дифференциальное уравнение движения привода, решение которого даст уравнения переходных процессов для скорости, момента и тока.
Самостоятельно разобрать:

