





|
Рассмотрим вопросы исследования устойчивости САР на примере системы стабилизации скорости двигателя, представленной на рисунке 2.1.
Рисунок 2.1- САР двигателя постоянного тока с обратной связью по скорости
Схема содержит: электродвигатель постоянного тока Д с обмоткой возбуждения ОВ; датчик скорости ДС; преобразователь П (тиристорный выпрямитель)с регулятором скорости РС; источник задающего напряжения UЗ. Задающий сигнал UЗ суммируется с отрицательным сигналом обратной связи по скорости UОС, образуя управляющий сигнал UУ, который поступает на вход регулятора скорости преобразователя П и далее на систему управления тиристорами выпрямителя. Так как UЗ остается постоянным, то сигнал на выходе РС при снижении скорости с увеличением нагрузки возрастает, приводя к возрастанию выходного напряжения преобразователя UП, что автоматически приводит к компенсации падения угловой скорости двигателя.
На практике устойчивость САР может быть определена с помощью критериев устойчивости (алгебраические -Гурвица и Рауса, частотные - Михайлова и Найквиста) или посредством моделирования САР на ЭВМ по кривой переходного процесса (перерегулирование, время переходного процесса, число колебаний). Запас устойчивости считается достаточным, если перерегулирование ≤ 10 – 30%.
Структурная схема САР ТП-Д
Процесс моделирования САР базируется на структурной схеме исследуемой системы, которая представлена на рисунке 2.2.

|
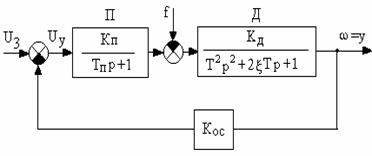
Рисунок 2.2 – Структурная схема САР
Передаточная функция двигателя по управляющему воздействию:
 (2.1)
(2.1)
где  ;
;  ;
;  ;
;  2.2)
2.2)
С учетом этого структурная схема может быть приведена к виду на рисунке 2.3.
Здесь КП - общий коэффициент усиления РС и П.
Устойчивость линейной САР зависит от параметров и их соотношения, поэтому исследуя переходные процессы в данной схеме проследим за изменением показателей качества САР по кривой переходного процесса в зависимости от КП и КОС.
|
Принимаем: КД=1; Т=1с; ξ=0,5; ТП=0,1с.
Рисунок 2.3 – Преобразованная структурная схема САР
Программа работы
2.4.1 При Кос=1; Iс=0 получить переходные процессы  в схеме (рисунок 2.3) относительно задающего (управляющего) воздействия U3=10в, Кп=2; 5; 8.
в схеме (рисунок 2.3) относительно задающего (управляющего) воздействия U3=10в, Кп=2; 5; 8.
2.4.2 Снять переходные процессы относительно возмущающего воздействия (нагрузки) при U3=0; Iс=10, Кп=2; 5; 8.
2.4.3 Пункты 2.3.1, 2.3.2 повторить положив Кп=1 и варьируя Кос (например Кос=2;5).
2.4.4 Произвести оценку качества САУ по виду кривой переходного процесса.
Порядок выполнения работы
2.5.1 Используя программное обеспечение Matlab Simulink набрать модель САР скорости двигателя (см. рисунок 2.3).
2.5.2 На вход схемы модели подать управляющий сигнал U3. На выход схемы для контроля скорости подключить виртуальный осциллограф и произвести его настройку под ожидаемые параметры сигнала.
2.5.3 Установить необходимые параметры элементов модели и задающего сигнала согласно программы работы. Произвести пуск модели.
2.5.4 Сохранить полученные осциллограммы и произвести их анализ.
Содержание отчета
2.6.1 Цель и программа работы
2.6.2 Функциональная и структурная схемы САР. Схема модели.
2.6.3 Результаты экспериментов в виде осциллограмм.
2.6.3 Анализ результатов экспериментов. Выводы.

