




Управление панелями клина ВУ производится по программам, приведенным на рис. 5.

Рис. 5. Программы регулирования lп = f (π*к )
(1, 2, 3 – номера программ)
В диапазоне π*к min ≤ π*к ≤ π*к max осуществляется плавное регулирование положения панелей lп клина по линейному закону с коррекцией по высоте Н, числу М и по углу атаки α. При снижении π*к. (уменьшается расход воздуха в двигателе) панели выдвигаются (увеличивается lп), уменьшая пропускную способность ВУ. По основной программе 1 система работает при больших числах М и высотах полета. Когда число М меньше определенного; значения, управление происходит по программе 2, на малых высотах — по программе 3. При изменении угла атаки самолета дополнительно выдвигаются панели клина (программы управления в этом случае показаны штриховыми линиями).
На рис. 6 изображена функциональная схема системы типа СРВМУ, реализующей закон управления входным устройством по величине πк с коррекцией по числу М.
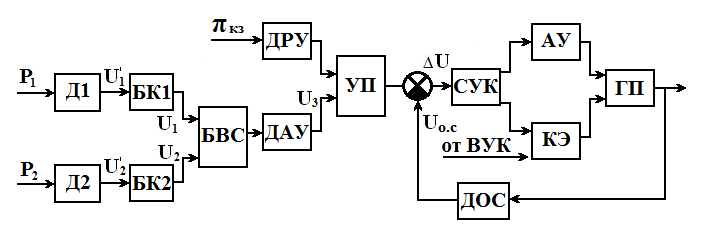
Рис. 6. Функциональная схема системы типа СРВМУ
Давление Р1 в заторможенном потоке воздуха на входе в компрессор преобразуется датчиком Д1 в напряжение переменного тока U 1'= f 1(P 1). Соответственно давление воздуха P2 за компрессором преобразуется датчиком Д2 в напряжение U 2'= f 2(P 2).
Поскольку статические характеристики датчиков U1'= f 1(P1). и U2'= f 2(P2) - нелинейны, то для получения линейной характеристики U= f (P) применены блоки коррекции БК1 и БК2, имеющие нелинейности, обратные нелинейностям характеристик датчиков.
Линеаризованные напряжения U1 и U2 преобразуются в решающем устройстве БВС (блоке выдачи сигналов) в сигнал переменного тока U3, пропорциональный величине πк. Сигнал U3 получается при повороте ротора индукционного датчика автоматического управления (ДАУ) от исполнительного электродвигателя БВС. В системе предусмотрен режим ручного управления от потенциометра датчика ручного управления ДРУ, выдающего сигнал переменного тока πк на вход следящей системы.
Сигнал πк от ДАУ или от ДРУ поступает через устройство переключения (УП) на блок усиления и коммутации (БУК), который усиливает сигнал рассогласования между πк и положением исполнительного элемента iк и при больших сигналах рассогласования ΔU = U3 - UOC переключает систему на релейный режим работы. Сигнал UОС выдается датчиком обратной связи ДОС, преобразующим линейное перемещение клина l к в напряжение переменного тока. Перемещение клина в заданное положение осуществляет гидропривод (ГП), который в линейном режиме управляется от агрегата управления (АУ), а в релейном режиме от электрогидрокрана КЭ.
На КЭ может подаваться также аварийный сигнал от выключателя уборки клина (ВУК) при падении давления в основной гидросистеме самолета.
На рис. 7,а представлена упрощенная схема датчиков сигнала U' = f (P). Их отличие от датчиков, состоит в следующем.
Каждый датчик системы типа СРВМУ состоит из двух дифференциальных индукционных датчиков и двух блоков анероидов. Сдвоенная конструкция датчиков дает возможность компенсировать погрешность, возникающую при перемещении подвижных центров анероидов от линейных ускорений, так как сигналы подвижных обмоток Wc направлены согласно при встречном рабочем движений и направлены встречно при однонаправленном движении.

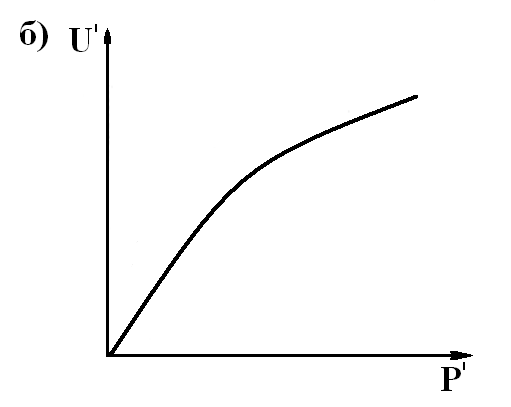
Рис. 7. а – упрощённая схема датчика системы типа СРВМУ;
б – Статическая характеристика датчика.
Электрическая схема каждого индукционного датчика имеет контур компенсации температурной погрешности, состоящий из неподвижных полуобмоток W2, соединенных встречно между собой и последовательно с подвижной сигнальной обмоткой WC, и резисторов в контуре W2. Потенциометр R 3, расположенный в блоке коррекции, служит для сдвига характеристики датчика и для компенсаций инструментальной погрешности.
Принцип действия дифференциального индукционного датчика состоит в том, что в сигнальной обмотке Wc наводятся э.д.с. от двух первичных обмоток W1, имеющих отдельные, замыкающиеся через Wc, магнитные системы. При нейтральном положении подвижной обмотки Wc наводимые в ней э.д.с. равны и противоположны по фазе, поэтому сигнал на выходе равен нулю. При увеличении давления воздуха, подводимого в герметичный корпус датчика, анероиды сжимаются, и перемещают сигнальные обмотки относительно магнитных систем первичных обмоток. Баланс э.д.с. нарушается, и на выходе датчика возникает разностный сигнал U '. Статическая характеристика датчика в относительных единицах u'= f 1 (p') приведена на рис. 7,б, где u'=U'/U'max - отношение текущего значения напряжения датчика к максимально возможному; p'=P/Pmax - отношение текущего значения давления на входе датчика к его максимальному значению.
Датчики Д 1 и Д 2 отличаются друг от друга только жесткостью анероидных блоков, поэтому относительные статические характеристики у них одинаковы.
Блок выдачи сигналов (БВС) является измерителем степени повышения давления. Блок управления и коммутации (БУК) представляет собой многокаскадный транзисторный усилитель, в который добавлен полупроводниковый несимметричный триггер, обеспечивающий включение релейного режима работы системы при больших рассогласованиях сигналов U 3 и UOC.
Вывод: в системе управления по степени сжатия воздуха в компрессореосуществляется плавное регулирование положения панелей lп клина по линейному закону с коррекцией по высоте Н, числу М и по углу атаки α. При снижении π*к (уменьшается расход воздуха в двигателе) панели выдвигаются (увеличивается l п), уменьшая пропускную способность ВУ.

