




Расчёт маховика.
Технологические машины выполняют технологический процесс в установившемся режиме, который обычно не имеет ограничений по продолжительности. Для машин, содержащих рычажные механизмы, этот режим является неравновесным, при котором кинетическая энергия изменяется периодически, т.е. её значения повторяются через время цикла tц (рис. 16.1). При этом угловая скорость ведущего звена также меняется периодически в зависимости от его положения (рис. 16.2). При этом характер изменения графиков кинетической энергии и угловой скорости обычно не соответствуют друг другу. Периодом изменения, обычно, является один оборот (2p радиан или 3600). Такое движение характеризуют средней угловой скоростью wСР и коэффициентом неравномерности
d =  . (16.1)
. (16.1)
Величина коэффициента неравномерности в технологических машинах мала (d = 0,03…0,05), так как только при этом условии обеспечивается нормальная работа привода. Малость d позволяет использовать при решении уравнения движения приближенные методы.
В данном случае вместо уравнения (15.8) используется
уравнение движения в интегральной форме
 Т = Т - Тн =
Т = Т - Тн =  А. (16.2)
А. (16.2)
Здесь Т и Тн –кинетические энергии машинного агрегата в произвольном и начальном положениях. За начальное положение целесообразно брать то, в котором ведомое звено занимает крайнее положение и его скорость равна 0.
А – сумма работ на данном участке всех внешних сил и моментов. Работа сил трения здесь не учитывается.
Рис.16.1
Рис.16.2
Для динамической модели (рис.15.2) после приведения сил и масс уравнение (16.2) приобретает вид
0,5 · J · ω2 - 0,5 · ( )2 · Jн = Ад + Ас. (16.3)
)2 · Jн = Ад + Ас. (16.3)
Здесь АД =  Мдdφ -работа движущих сил на участке;
Мдdφ -работа движущих сил на участке;
 АС = Мсdφ -работа сил сопротивления и сил тяжести на участке. Величина АС при расчётах обычно бывает отрицательной.
АС = Мсdφ -работа сил сопротивления и сил тяжести на участке. Величина АС при расчётах обычно бывает отрицательной.
Для упрощения записи здесь и далее опускаем значок «пр» при приведённых моментах движущих сил МД, сил сопротивления МС и приведённых моментах инерции.
Анализ уравнения (16.3) показывает, что причинами колебаний угловой скорости ведущего звена механизма являются:
а) несоответствие величин приведённого момента МД движущих сил и приведённого момента МС сил сопротивления. Это приводит к появлению избыточной работы
Аи = Ад + Ас. (16.4)
б) непостоянство приведённого момента инерции динамической модели при наличии в механизме масс, совершающих возвратно-поступательное, качательное и сложно-плоское движения.
Величина и характер изменения сил сопротивления задаются при проектировании. Следовательно, путём интегрирования можно в каждом положении механизма определить величину работы Ас. Обозначим работу Ас за период (один оборот кривошипа)  .
.
При установившемся неравновесном движении движущие силы или моменты за период совершают одинаковую работу, т. е. 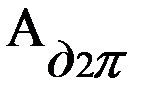 = - .
= - .
Момент движущих сил МД зависит от угловой скорости ω, однако при малых изменениях скорости можно приближённо принять МД = соnst.
Тогда АД = МД · φ, где 0 ≤ φ ≤ 2π.
Величина движущего момента МД = () / 2π. (16.5)
Изменение кинетической энергии агрегата, равное избыточной работе, определится по зависимости:
Т = АИ = МД · φ + МС dφ. (16.6)
Подставляя в уравнение движения (16.3) зависимости (15.7) и (16.2), после преобразований можно получить
Т = ТС + ТV. (16.7)
Здесь Тc = 0,5Jc (ω2 -  ) (16.8)
) (16.8)
Тc - изменение кинетической энергии вращающихся масс;
ТV= 0,5·JV·ω2 - 0,5·JVн·  - изменение кинетической энергии масс, совершающих сложно-плоское и возвратно-поступательное движения.
- изменение кинетической энергии масс, совершающих сложно-плоское и возвратно-поступательное движения.
Из-за малости коэффициента неравномерности хода (δ = 0,03…0,05) справедливо приближённое равенство ω ≈ ω н ≈ ω ср.
Поэтому можно принять:
Тv ≈ 0,5 •  (Jv - Jvн). (16.9)
(Jv - Jvн). (16.9)
Отсюда находится в каждом положении механизма приращение кинетической энергии вращающихся масс:
ТC = Т - ТV. (16.10)
Величина ТC, периодически меняясь, достигает в каких-то положениях максимальных  и минимальных
и минимальных  значений. Соответственно, в этих положениях угловая скорость будет достигать также значений ωmax и ωmin. Используя зависимости (16.10), (16.9), (16.6), (16.1), считая приближённо
значений. Соответственно, в этих положениях угловая скорость будет достигать также значений ωmax и ωmin. Используя зависимости (16.10), (16.9), (16.6), (16.1), считая приближённо
ωср = 0,5(ωmax + ωmin), можно получить, что наибольший перепад кинетической энергии вращающихся масс
 =
=  -
-  = JС ∙ δ ∙
= JС ∙ δ ∙  . (16.11)
. (16.11)
Если при проектировании задана величина коэффициента неравномерности δ, то из зависимости (16.11) находится необходимая для этого величина Jc приведённого момента инерции вращающихся масс:
Jc = / (δ ∙ ). (16.12)
Величина Jc, получаемая из зависимости (16.12), обычно не может быть обеспечена за счёт приведённого момента инерции Jco имеющихся вращающихся масс агрегата. В этом случае на ведущем валу исполнительного механизма устанавливается маховик с моментом инерции:
JМ = Jc – Jco. (16.13)
Маховик (рис.16.3) представляет собой отбалансированное колесо, масса которого сосредоточена, в основном, на ободе. Он является аккумулятором кинетической энергии. Когда работа двигателя оказывается в избытке, маховик накапливает кинетическую энергию, которая потом используется при выполнении технологического процесса. Чем больше Jc (а следовательно, и JМ), тем выше аккумулирующая способность маховика, тем меньше будут колебания ω при колебаниях потока кинетической энергии, тем равномернее будет вращаться ведущее звена механизма.
 Рис.16.3
Рис.16.3
Отклонение угловой скорости от её среднего значения ωср можно найти, так как известно приращение  кинетической энергии в положении, где ω=ωср.
кинетической энергии в положении, где ω=ωср.
= 0,5( +  ). (16.14)
). (16.14)
В каждом положении ТС -  =
=  - .
- .
Раскрывая это уравнение, получаем
 (16.15)
(16.15)
Представим ω = ωср + Δω. (16.16)
Из уравнения (16.15), используя зависимость (16.16) и принимая приближённо Δω2 = 0, после преобразований получим:
Δω = ( ТС - ) / (ωср ∙ JC). (16.17)
Следует отметить, что в данных методических указаниях рассматривается решение уравнения движения для случая, когда не учитывается влияние колебаний угловой скорости на величину движущего момента двигателя.
Однако, имеются машины, в которых влияние скорости на силы и моменты достаточно сильно. К ним относятся, например, асинхронные и шунтовые двигатели, получившие большое распространение в промышленном электроприводе.
В этом случае приведённое выше решение может быть принято, как первое приближение. Уточнённое решение, которое можно получить методом последовательного приближения, приводится в работах [1], [4]. Оно всегда даёт решение с несколько меньшей величиной JC. Это позволяет использовать маховики с меньшим моментом инерции, а следовательно, с меньшими габаритами и металлоёмкостью.
Лекция №17.

