




Каждый новый объект исследования, как правило, выдвигает новые задачи, которые могут быть решены различными способами.
Основываясь на опыте применения киносъемки в измерительных целях, мы наметим пока лишь условно четыре способа измерительной киносъемки: однокамерный, многокамерный, стереоскопический и кинотеодолитный.
Однокамерный способ. Если движение изучаемого объекта происходит в одной плоскости, которая параллельна плоскости кинопленки в кадровом окне киноаппарата, то по материалам киносъемки, полученным с одной съемочной точки, можно определить многие количественные данные. Рассмотрим несколько примеров такой измерительной киносъемки.
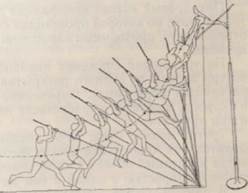
На первом примере (рис. 18-4) показан результат анализа движений спортсмена, выполняющего прыжок с шестом через рейку.
|
Рис.18-4
По изображениям кинокадров воспроизведены положения спортсмена через равные промежутки времени и получена траектория его движения. Масштабной рейкой в данном случае является шест, на котором нанесены деления.
Зная масштаб изображения, измеряют отрезки пути, проходимые спортсменом за известные интервалы времени. По этим данным определяют скорость движения спортсмена и ускорения на любых участках траектории его движения, а также вычисляют другие параметры прыжка (мускульная сила, кинетическая энергия, работа).
Другой пример измерительной киносъемки, выполненной одним киноаппаратом, изображен на рис. 18-5. Здесь киносъемка применена для изучения прыжка парашютиста при малой высоте полета самолета.
Киносъемочный аппарат был установлен на определенном расстоянии от наземного ориентира, над которым должен пролететь самолет, а парашютист — отделиться от самолета. Главная оптическая ось объектива киноаппарата была направлена перпендикулярно курсу полета самолета. Масштаб изображения определялся по известной длине самолета и фокусному расстоянию объектива киноаппарата.
Покадровый анализ кинофильма дал возможность восстановить траекторию, по которой происходил спуск парашютиста, и измерить отрезки пути, проходимые парашютистом за известные промежутки времени.
По траектории снижения парашютиста установлена величина потери высоты до полного раскрытия парашюта и начала спуска с раскрытым парашютом. Определено время раскрытия парашюта и скорость движения парашютиста на разных участках траектории и при приземлении.
Третий пример (рис. 18-6) показывает, что данный способ измерительной киносъемки может быть применен также и в случае, когда изучаемый объект и киносъемочный аппарат движутся с одинаковой скоростью в одном и том же направлении.
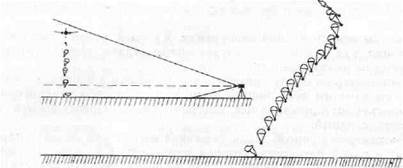
Рис. 18-5. Траектория парашютиста, полученная по материалам киносъемки
В данном случае измерительная киносъемка применена при испытании катапультного устройства для покидания самолета летчиком при большой скорости полета. Определение масштаба изображения, как и в предыдущем случае, производилось по известной длине самолета и фокусному расстоянию объектива. Разумеется, при определении истинной скорости движения катапультного кресла с летчиком необходимо учесть скорость полета самолетов.
Многокамерный способ измерительной киносъемки заключается в том, что она производится с двух или трех взаимно перпендикулярных направлений двумя или тремя синхронно работающими киноаппаратами (рис. 18-7). Этот способ съемки применяется при

|
изучении полета птиц и насекомых, при исследованиях моделей самолетов в полете на режиме штопора в вертикальной аэродинамической трубе, а также при исследованиях многих других объектов, движения которых не могут быть упорядочены.
Для упрощения последующего анализа кинокадров позади изучаемого объекта устанавливают щиты с координатной сеткой. Если киноаппараты имеют хорошее стояние кадра, то координатную сетку можно снять предварительно на ту же кинопленку, на которую затем будет производиться съемка объекта.
Одновременно киносъемка с разных направлений может производиться также и одним киноаппаратом с применением системы зеркал. На рис. 18-8 изображена схема установки для изучения полета двукрылых насекомых (пчел, шмелей, мух, комаров, саранчи и т. п.). Исследования проводят в миниатюрной аэродинамической трубе, в рабочей части которой создаются условия, благоприятные для полета исследуемых объектов (освещенность, температура, влажность). Через 15—30 мин после включения вентилятора и взлета насекомого устанавливается «стационарный» режим полета, во время которого производится киносъемка высокоскоростным киноаппаратом с трех взаимно перпендикулярных направлений.
Три осветительных прибора: Л1, Л2 и Л3 —с импульсными лампами и конденсорами, формирующими параллельные пучки световых лучей, образуют на трех участках полупрозрачного экрана Э силуэтные изображения исследуемого насекомого в трех проекциях (сбоку, снизу и сзади). Лампа Л4 освещает щель, перекрываемую колеблющейся ножкой камертона. Изображение этой щели образуется на четвертой части кадра. Перекрытия щели ножкой камертона служат для отметки времени.

Рис. 18-7. Схема измерительной киносъемки с трех взаимно перпендикулярных направлений
Расшифровка материалов киносъемки и восстановление положений корпуса и крыльев насекомого осуществляются путем сравнения силуэтных изображений, полученных на кинопленке, с силуэтными изображениями увеличенной модели насекомого. Измерения производятся с помощью координатника на модели. По материалам киносъемки определяются также временные характеристики взмахов крыла.
Стереоскопический способ. Когда объект съемки движется не параллельно плоскости кинопленки в кадровом окне киноаппарата, а по некоей.пространственной траектории, необходима стереоскопическая киносъемка, которая дает возможность восстановить форму траектории и определить скорости движения объекта в пространстве.
Стереоскопическая киносъемка, то есть одновременная съемка одного и того же объекта с двух точек (двумя одинаковыми объективами), по сравнению с обычной киносъемкой одним киноаппаратом является процессом более сложным. При стереоскопической киносъемке необходимо скомпоновать кадр в трех измерениях, и не всегда точка съемки, приемлемая для обычного кадра, может совпадать с точками съемки стереоскопической пары кадров.
Оптические оси объективов должны быть параллельны между собой и перепендикудярны линии базиса съемки. Величина съемочного базиса является исходной величиной при последующих вычислениях координат объекта, а поэтому должна быть замерена точно при съемк. Обязательным условием измерительной стереоскопической киносъемки является наличие на кинокадрах главной точки картины — точки пересечения оптической оси объектива киноаппарата (главного луча перспективы) с плоскостью кадра. От степени точности, с которой определено положение главной точки картины каждого кадра, зависит непосредственно и точность производимого затем количественного анализа графическим способом.
Измерительная съемка стереокиноаппаратом, например 70СКД, имеющим
максимальный базис съемки 110 мм, возможна при небольших расстояниях до объекта. Чем больше расстояние до объекта, тем больше должен быть
базис съемки, чтобы получить в изображениях стереопары такие параллаксы, которые можно измерить с достаточной точностью. Для съемки удаленных объектов может потребоваться базис, равный нескольким метрам (рис. 18-9).
При базисе съемки менее 1 м можно применять киноаппарат со специальными большими стереоприставками. Если же съемочный базис больше 1 м, измерительная стереокиносъемка производится двумя киноаппаратами, связанными одним общим валом или приводимыми в движение синфазными электродвигателями. Установка киноаппаратов и их взаимное ориентирование производится с помощью геодезических инструментов.

|

Рис.18-8 18-9 Схема установки для изучения полета насекомых с помощью киносъемки.
Метрическое дешифрирование материалов измерительной стереоскопической киносъемки производится геометрическим или графическим способом.
Схема геометрического определения координат положения точки в пространстве с помощью стереоскопической съемки изображена рис. 18-10. Здесь N — точка, пространственное положение которой нужно определить; Вс — базис съемки; Оа и Ов — центры объективов, образующих левый и правый кадры стереопары.

Рис. 18-10. Схема геометрического определения положения точки в пространстве по изображениям стереопары кадров
Точку пересечения главной оптической оси объектива Оа с перпендикулярной ей вертикальной плоскостью, в которой лежит искомая точка N, примем за начало координат (X, Y, Z). Тогда линия N'1Oa (совпадающая с главной оптической осью левого объектива) будет являться направлением по оси Z. Вертикаль, проходящая через точку N (линия NN1), будет направлением оси Y, а горизонталь, параллельная съемочному базису Вс, — станет направлением оси X.
Из подобия треугольников OaN1Oв и пвОвт можно определить отстояние точки N, определяемое как расстояние от центра проекции левого объектива Оа до вертикальной плоскости, проходящей параллельно линии базиса через точку N:
Z=Вс f /р (18-5)
где f — фокусное расстояние объектива; Вс — базис съемки; р= х – x1 — горизонтальный параллакс точки N на изображениях стереопары. По этой формуле может быть определено отстояние любой точки снимаемого объекта от вертикальной плоскости, проходящей через съемочный базис.
Из подобия треугольников Nʹ1OaN1 и аОа па замечаем, что расстояние X от точки N до вертикальной плоскости, проходящей через оптическую ось левого объектива, может быть определено, как
Х =Zx/f (18-6)
где х — горизонтальная координата изображения точки N на левом кадре стереопары. Подставив в полученное выражение (18-6) величину Z, получим:
X = Bcx/p (18-7)
Эта формула определяет вторую пространственную координату точки N.
Аналогично из подобия треугольников NʹOaN1 и аОа па определяется расстояние Y от точки N до горизонтальной плоскости, проходящей через оптическую ось левого объектива:
Y = Zy/f (18-8)
где у — вертикальная координата точки N на левом кадре стереопары.
Подставив в это выражение величину Z из формулы (18-6), получим третью пространственную координату точки N, определяющую ее положение по вертикали:
Y = Bcy/p (18-9)
Таким образом, зная положение базиса съемки, его величину, фокусное расстояние объективов и измеряя параллаксы соответственных точек изображений стереопары, можно определить пространственные координаты снятого объекта. Анализируя последовательные стереопары кадров кинофильма, представляется возможность воспроизвести траекторию движения снятого объекта в пространстве.
Графический способ восстановления положения предмета в пространстве по изображениям стереопары кадров основан на теории перспективы. При этом решается обратная задача перспективы – построение ортогональных проекций предмета по двум перспективам.
Кинотеодолитньй способ применяется для определения пространственных координат и восстановления траектории движения объектовна большом удалении и имеющих большую скорость (самолеты, вертолеты и др.).
Кадры кинотеодолитной съемки показаны на рис. 18-11.
Два или три кинотеодолита, установленных на определенном расстоянии друг от друга и соединенных электрическими кабелями
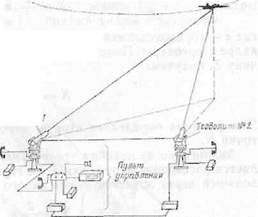

Рис. 18-12. Схема кинотеодолитной съемки
Рис. 18-11. Кадры кинотеодолитной съемки
между собой и центральным пунктом управления, составляют кинотеодолитную станцию (рис. 18-12). Нормальное расстояние между кинотеодолитами (базис) обычно равно ¼…1/5 среднего расстояния до объекта. Необходимо, чтобы кинотеодолиты были установлены на одном уровне, так как неодинаковое расположение их по высоте значительно усложняет вычисление координат объекта в пространстве.
Для определения пространственных координат объекта достаточно двух кинотеодолитов. Однако в кинотеодолитную станцию,

Рис. 18-13. Схема определения координат точки Р с помощью кинотеодолитной съемки
Рис. 18-14. Кадр теодолитной съемки с кодом
как правило, входят три кинотеодолита. Во время работы объект съемки для одного из кинотеодолитов может оказаться против солнца или за облаком. Кроме того, может быть такое положение объекта относительно точек базиса, при котором оси визирования пересекаются под острым углом. В этом случае даже небольшие неточности определения углов могут привести к значительным ошибкам в определении координат объекта.
Во время работы все кинотеодолиты непрерывно наводятся на объект и производится синхронная съемка с двух точек. Если преследуемая цель несколько уйдет с точки пересечения нитей в визире, то это будет зафиксировано на кинопленке и в дальнейшем учтено при анализе материалов съемки.
Вычисление координат и построение траектории движения объекта в пространстве производится на основе следующей схемы (рис. 18-13). Если объект, координаты которого нужно определить, находится в точке Р и засечки его произведены кинотеодолитами из точек S1 и S 2, то пространственные координаты точки Р определяются из уравнений.
Имеются кинотеодолиты, в которых регистрация углов азимута и места, а также номеров кадров производится в кодированном виде (рис. 18-14). Дешифрирование такого фильма выполняется на киноанализаторе, связанном со счетно-решающим устройством и перфоратором, который автоматически считывает кодированные данные и поправку допущенной при съемке неточности визирования. Дешифровщик устанавливает легко скользящую сетку экрана киноанализатора на нужную точку изображения и нажимает ногой на педаль, включающую перфоратор, на что затрачивается не более 2 с. Перфокарты поступают затем в электронно-вычислительную машину, которая выполняет расчетные операции по определению пространственных координат объекта.

