




В отличие от линейных систем точность нелинейных систем зависит от величины внешних воздействий. Такая же зависимость существует и в отношении устойчивости и качества переходных процессов в нелинейных системах.
У линейных систем точность, устойчивость и качество переходных процессов не зависят от величины внешних воздействий. Благодаря применимости к линейным системам принципа суперпозиции изменение величины внeшнего воздействия вызывает в них только пропорциональное изменение абсолютного отклонения выходной величины, не сказываясь на качестве переходного процесса (его колебательности, длительности). Последнее иллюстрируется рис. 11.10, а, где приведены переходные характеристики для трех значений внешнего воздействия, пропорциональных числам, которыми отмечены характеристики.
Устойчивость линейных САУ вообще не зависит от внешних воздействий и определяется параметрами самой системы. Если линейная система устойчива, то это значит, что она устойчива относительно любого установившегося режима и переходная составляющая любого процесса всегда будет сходящейся.
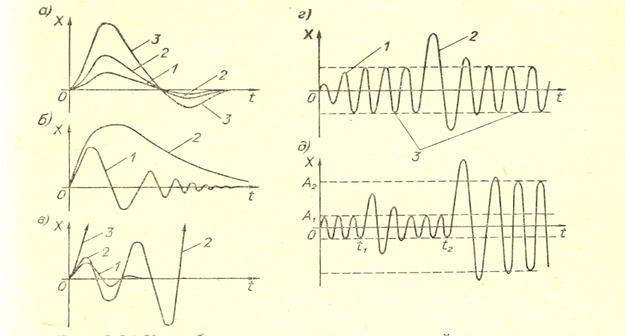
Рис. 11.10. К особенностям динамики нелинейных систем.
В нелинейных системах дело обстоит сложнее. Качество переходных процессов в них изменяется при изменении величины внешнего воздействия, например, как показано на рис.11.10, б. При этом в отличие от линейных систем период колебаний процесса не постоянен, а изменяется по мере изменения отклонения. (Чаще всего он уменьшается с уменьшением отклонения – см. рис.11.10, б).Более того, нелинейная система, устойчивая при одних значениях внешних воздействий, может оказаться неустойчивой с возникновением расходящегося переходного процесса при других значениях этого воздействия (рис.11.10, в и г).
На рис.11.10, в показан случай, когда система, устойчивая при малых воздействиях (кривая 1), неустойчива при больших воздействиях с получением колебательного (кривая 2) или монотонного (кривая 3) расходящегося переходного процесса. На рис.11.10, г представлен другой случай, когда, наоборот, при малых возмущениях переходный процесс является расходящимся (кривая 1), а при больших - затухающим (кривая 2). В этом случае, очевидно, установившимся режимом при отсутствии внешних воздействий будут незатухающие колебания (кривые 3). После всякого воздействия, сбивающего эти колебания к нулю, в системе будет возникать расходящийся процесс их восстановления, а после всякого воздействия, создающего большое отклонение выходной величины, будет возникать процесс, сходящийся опять к этим колебаниям.
Возможной причиной получения случая, показанного на рис.11.10, в, может быть, например, наличие насыщения в корректирующем звене, обеспечивающем устойчивость системы, а причиной второго случая, показанного на рис.11.10, г, - наличие зоны нечувствительности у этого же звена. Здесь в первом случае неустойчивость возникает при больших отклонениях от установившегося режима вследствие ослабления действия корректирующего звена из-за его насыщения. Во втором случае неустойчивость будет в точке покоя, поскольку при малых отклонениях относительно этой точки коррекция не действует из-за наличия зоны нечувствительности. При больших отклонениях корректирующее звено выходит из зоны нечувствительности и обеспечивает затухающий переходный процесс вхождения обратно в эту зону. В установившемся состоянии, следовательно, в системе будут существовать незатухающие колебания, амплитуда которых ограничена зоной нечувствительности, несколько превышая ее.
Такие устойчивые собственные колебания с постоянной амплитудой, определяемой нелинейностями системы, называются а в т о к о л е б а н и я м и. Автоколебания представляют собой новый вид установившегося режима, возможного при отсутствии внешних воздействий наряду со статическим установившимся режимом и характерного только для нелинейных систем. В линейных системах, как мы знаем, собственные незатухающие колебания могут быть при нахождении системы на границе устойчивости, однако амплитуда этих колебаний определяется внешними воздействиями, будучи пропорциональна им. При этом такая линейная САУ является неработоспособной.
Если же в нелинейной САУ возможны автоколебания, то это еще не означает, что она непригодна к эксплуатации. Во-первых, эти автоколебания могут быть настолько малы по амплитуде, что не будут оказывать заметного влияния на работу системы. Это часто относится, например, к автоколебаниям, вызываемым наличием зоны нечувствительности. Во-вторых, может быть другой случай, когда в системе принципиально возможны автоколебания с большой амплитудой, однако, для того, чтобы они возникли, требуется соответственно очень большой внешний толчок. В результате может оказаться, что при всех практически возможных воздействиях на систему в ней могут быть только устойчивые переходные процессы. Этот случай соответствует кривым 1 и 2 на рис.11.10, в, если предположить, что кривая 2 расходится не до бесконечности, а до автоколебаний с определенной амплитудой. Подобный случай может быть, например, если наряду с насыщением корректирующего звена, приводящим при больших воздействиях к нарушению устойчивости с переходом от кривой 1 к кривой 2, в системе имеется еще другое последовательное звено с насыщением на значительно большем уровне, которое и ограничивает амплитуду колебаний кривой 2.
Возможны нелинейные системы, в которых в зависимости от велич:ины внешних воздействий возникают разные автоколебания, с разными амплитудами и частотами. Это иллюстрируется рис.11.10, д. Здесь при малых воздействиях переходные процессы стягиваются к автоколебаниям с амплитудой А1,а при больших - к автоколебаниям с амплитудой А2(моменты времени t 1 и t 2 - начала соответствующих переходных процессов).
Описанные особенности устойчивости нелинейных систем требуют при рассмотрении устойчивости таких систем оговаривать начальные условия и внешние воздействия, как это делалось ранее при рассмотрении качества линейных систем. В результате в случае нелинейных систем надо говорить не об устойчивости системы вообще, а об устойчивости определенного ее статического или динамического режима, т. е. определенного ее состояния или движения при определенных отклонениях от него. В связи с этим при изучении нелинейных систем употребляются понятия устойчивости в малом, в большом и в целом.
У с т о й ч и в о с т ь в м а л о м - это устойчивость при бесконечно малых отклонениях от исходного режима.
У с т о й ч и в о с т ь в б о л ь ш о м - это устойчивость при конечных отклонениях, возможных в данной системе по условиям ее работы.
У с т о й ч и в о с т ь в ц е л о м - это устойчивость при неограниченных отклонениях, т. е. при отсутствии каких-либо ограничений их. Нелинейная система может быть устойчива в малом, но неустойчива в большом (рис.11.10, в).В линейных системах таких градаций устойчивости не существует, там система либо неустойчива, либо устойчива в целом. При этом в последнем случае будут устойчивы не только положения равновесия системы, но и любые вынужденные процессы.

