




ЛЕКЦИЯ 11
НЕЛИНЕЙНЫЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
К нелинейным системам автоматического управления относятся такие системы, в которых связь между выходной и входной величинами одного или нескольких основных элементов задается нелинейными уравнениями.
В общем случае каждая система автоматического управления имеет те или иные нелинейности, однако часто эти нелинейности влияют столь незначительно, что поведение системы с достаточной точностью может быть описано только линейными дифференциальными уравнениями. Нелинейные уравнения процессов в такой системе заменяют приближенными линейными уравнениями и исследуют систему как линейную.
Вопрос о возможности линеаризации уравнений или процессов в системе решают исходя из требования точности расчетов. Часто решение этого вопроса зависит от того, при каких отклонениях переменных величин работает система.
Одну и ту же систему в зависимости от конкретных условий работы, а также от принятой степени идеализации процессов, протекающих в ней, можно рассматривать как линейную и как нелинейную. Однако какие же системы в теории автоматического управления относятся к нелинейным? Это такие системы, которые нельзя рассматривать как линейные даже при малых отклонениях переменных, иначе говоря, такие системы, которые имеют существенно нелинейные характеристики.
Сущесmвенно нелинейными называются такие характеристики, которые в некоторых тачках рабочего интервала неоднозначны, терпят разрыв или вообще не существуют.
Системы с существенно нелинейными элементами линеаризовать методами, рассмотренными при рассмотрении линейных систем, невозможно. Если ограничиться линеаризацией в тех точках, где она допустима, и попытаться анализировать систему как линейную во всем рабочем диапазоне, то можно получить неверные результаты.
Нелинейные системы классифицируют по виду существенно нелинейных элементов, входящих в систему. Следовательно, классификация нелинейных систем сводится к классификации существенно нелинейных характеристик элементов.
Существенно нелинейных характеристик много. Рассмотрим наиболее часто встречающиеся из них.
Ограниченно-линейные характеристики линейные (наклонные) в начале и нелинейные (горизонтальные) по краям (рис.11.1). Такую характеристику имеют усилители и, в частности, электронный усилитель. Поскольку наличие нелинейных участков связано с насыщением элементов усилителей, то часто эту характеристику называют характеристикой с зоной насыщения.

Рис.11.1. Статическая характеристика электронного усилителя.
Характеристики с зоной нечувствительности. Если на вход элемента, имеющего характеристику с зоной нечувствительности, подавать сигнал х 1, то до тех пор, пока этот сигнал не превысит некоторого порогового значения х 10,выходной сигнал х 2будет равен нулю (рис.11.2,а). Пороговые значения входной величины разных знаков определяют величину зоны нечувствительности (на рис. 11.2,азона нечувствительности равна 2 x 10).

Рис.11.2. К определению характеристики с зоной нечувствительности.
Появление зоны нечувствительности может быть вызвано различными причинами, зависящими от конструктивного выполнения и принципа действия данного элемента.
Например, в характеристике золотника причиной появления зоны нечувствительности является конструктивная особенность поясков поршня (рис.11.2,б). Поскольку ширина поясков больше, чем ширина отверстий, через которые масло поступает в гидропривод, то понадобится осуществить некоторое· перемещение штока золотника, прежде чем отверстия начнут открываться, и масло будет поступать в ту или другую полость гидропривода. Если характеристику с зоной нечувствительности (рис.11.2,а ) отнести к золотнику, то х 1 будет обозначать ход штока золотника, а х 2 – количество масла, проходящего через отверстие в единицу времени. В этом случае величина х 2 определяет скорость движения поршня гидропривода.
На рис.11.2,впредставлен другой элемент, характеристика которого имеет зону нечувствительности,- устройство для передачи колебаний оси х 1 на маятник с помощью поводка. Так как вилка имеет раствор δ, больший диаметра d подвески маятника, то приводная ось будет иметь свободный ход, при котором маятник остается в нулевом положении. Очевидно, что величина зоны нечувствительности равна δ - d.
Характеристики типа сухого трения или зазора имеют вид петли. Они неоднозначны во всем диапазоне изменения входной величины х 1 (рис.11.3,а). Поясним построение такой характеристики на примере передачи угла поворота с помощью поводка и вилки (рис.11.3,б).
Пусть с оси 1 на ось 2 требуется передать угол поворота х 1. С этой целью на оси 1 имеется вилка с раствором δ, а на оси 2 - поводок с диаметром d. Если вилка касается поводка стороной, противоположной направлению вращения, то угол поворота х 2 изменяется пропорционально углу поворота х 1. При изменении направления вращения вилка должна коснуться поводка другой стороной. Следовательно, ось 1 будет иметь свободный ход, во время которого в передаче выбирается зазор δ - d,а ось 2 остается в неизменном положении.
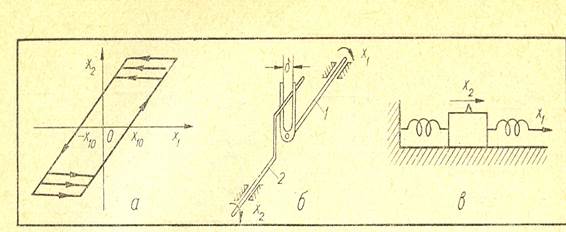
Рис.11.3. К определению характеристики типа сухого трения или зазора.
Такую же характеристику имеет устройство, в котором осуществляется перемещение х 2ползунка по направляющей под действием перемещения х 1 свободного конца пружины (рис.11.3,в).При перемене направления движения сила трения F тр,действующая между ползунком и направляющей, изменяет свой знак. Поэтому ползунок остается в неизменном положении до тех пор, пока сила, действующая на пружину, не уменьшится на величину 2 F тр.
Сухое трение и зазоры, давая одинаковые по внешнему виду нелинейные характеристики элементов, принципиально отличаются друг от друга тем, что зазор в системе можно свести к нулю, например, установкой предварительно затянутой спиральной пружины на ось 2 (рис. 11.3,б), а силу трения можно только уменьшить, но к нулю свести ее нельзя.
Релейные характеристики имеют ту отличительную особенность, что в них при достижении входной величиной некоторых пороговых значений выходная величина изменяется скачкообразно (рис.11.4 – 11.7).

Рис.11.4. Схема включения (а) и Рис. 11.5. Схема включения (а) и характеристика (б,в) скользя-
характеристика (б) эле- щего контакта.
ктрического контакта.

Рис. 11.6. Характеристика электро- Рис. 11.7. Схема включения (а) и характеристика (б) биметал-
магнитного реле. лического (теплового) реле.
Например, электрический контакт в зависимости от угла поворота производит подачу напряжения в исполнительную цепь (рис. 11.4,а). Контакт имеет холостой ход х 10(рис. 11.4,б). При х 1 ≥ х 10в исполнительную цепь подается напряжение  .
.
У скользящего контакта, который управляет вращением реверсивного электродвигателя, положение щетки шириной d на контактной пластине определяется углом поворота х 1рычага щеткодержателя (рис. 11.5, а). Контактная пластина имеет в своей средней части изоляционный участок шириной δ. Напряжение подается на ту или иную обмотку электродвигателя в зависимости от того, на каком проводящем участке пластины находится щетка. На рис. 11.5, б и в приведены характеристики скользящего контакта для случаев соответственно d = δ и d < δ. На характеристиках через х 2обозначена скорость вращения электродвигателя.
На рис. 11.6 изображена типичная характеристика электромагнитного реле (х 1– ток в обмотке реле или напряжение, подаваемое на обмотку; х 2- ход контактов, отсчитываемый от их нормального положения). Характеристика имеет петлю, ширина которой равна разности тока срабатывания и тока отпускания.
На рис. 11.7,аизображено биметаллическое (тепловое) реле, управляющее исполнительным реверсивным электродвигателем. Реле имеет в качестве чувствительного элемента биметаллическую пластину, помещенную между двумя неподвижными шарнирами. При некоторой температуре пластина изогнута так, что замкнут левый контакт. По мере уменьшения температуры пластина будет стремиться изогнуться в противоположную сторону. Перебрасывание контакта, а следовательно, и реверс двигателя может произойти только при температуре, ниже той, при которой кривизна свободной пластинки равна нулю. Характеристика реле изображена на рис. 11.7, б, где по оси абсцисс отложены изменения температуры х 1,а по оси ординат - скорость вращения х 2электродвигателя.
Следует отметить, что не все системы, имеющие контакты, относятся к нелинейным. В автоматических системах могут использоваться различные реле вспомогательного характера (например, для подключения источников питания), скачкообразность изменения выходных величин которых не влияет существенно на характер процесса управления. Такие системы можно отнести к линейным, если только у них нет других нелинейных элементов.
Нелинейная характеристика, имеющая вид петли гистерезиса, изображена на рис. 11.8. При наличии гистерезиса, например магнитного или механического, зависимость выходной величины от входной будет неоднозначной. В отдельных случаях при точных расчетах эту неоднозначность приходится учитывать. Однако чаще при расчетах усредняют характеристику, заменяя петлю некоторой средней линией. Так поступают, например, при использовании кривых намагничивания различных сортов стали или при использовании характеристик механических пружин. В этом случае характеристика будет плавной, т. е. несущественно нелинейной.

Рис.11.8. Гистерезисная характери- Рис.11.9. Схема (а) и характеристика (б) пневматического
стика. усилителя.
Комбинированные нелинейные характеристики представляют собой комбинацию из различных характеристик, рассмотренных ранее.
Примером может служить характеристика пневматического усилителя, который применяют в различных автоматических устройствах и, в частности, в автопилотах. Рассмотрим принцип действия этого усилителя (рис. 11.9,а). К задающим соплам 3 и 4, против которых расположены приемные сопла 1и 5, подводится воздух под некоторым давлением. Приемные и задающие сопла разделены заслонкой 2, которая может поворачиваться относительно оси 00 ', изменяя степень перекрытия приемных сопел. В результате этого давления в камерах пневматического реле 6 будут различными, что вызовет прогиб мембраны реле в ту или иную сторону.
Входной величиной усилителя является угол поворота заслонки х 1,а выходной - ход штока, связанного с мембраной пневматического реле х 2.Если в исходном положении оба сопла закрыты, то заслонка должна повернуться на некоторый угол х 10,прежде чем одно из сопел начнет воспринимать давление (рис. 11.9,б). При повороте заслонки на угол x10 ≤ х 1 ≤ х 11 разность давлений в камерах пневматического реле, а следовательно, и перемещение штока х 2будут пропорциональны углу поворота заслонки. Когда одно из приемных сопел полностью открыто (х 1 > х 11), в пневматическом реле установится максимальный перепад давления, который будет оставаться постоянным при дальнейшем повороте заслонки.
Как видно из рис. 11.9,б,характеристика пневматического усилителя является комбинацией ограниченно-линейной характеристики и характеристики с зоной нечувствительности.
В чем характерное отличие нелинейных элементов от линейных с точки зрения теории автоматического управления?
1. Выходная величина нелинейной системы непропорциональна входному воздействию; форма реакции системы зависит от величины входного воздействия.
2. Характер процессов в нелинейной системе зависит от величины начального отклонения, вызванного возмущением. В связи с этим для нелинейных систем существуют понятия об устойчивости “в малом”, “в большом”, “в целом”.
3. Для нелинейных систем характерен режим незатухающих периодических колебаний с постоянной амплитудой и частотой (автоколебаний), возникающий в системах при отсутствии периодических внешних воздействий.
4. При затухающих колебаниях переходного процесса в нелинейных системах происходит изменение периода колебаний.
Основные задачи исследования нелинейных систем. Методы исследования. Задачами исследования нелинейных систем являются:
1) отыскание возможных состояний равновесия системы и исследование их устойчивости;
2) определение автоколебаний и анализ их устойчивости;
3) исследование процессов перехода системы к тому или иному установившемуся состоянию при различных начальных отклонениях.
Начало исследования нелинейных систем обычно связано с рассмотрением устойчивости и определением автоколебаний.
В настоящее время не создано общей теории анализа нелинейных систем. Разработанные методы позволяют решать лишь отдельные нелинейные задачи.
Все инженерные методы исследования нелинейных систем разделяются на две основные группы.
Точные методы, например, метод А.М.Ляпунова, метод фазовой плоскости, метод точечных преобразований, частотный метод В.М.Попова, основаны на точном решении нелинейного дифференциального уравнения, может быть и упрощенного.
Приближенные методы, такие как метод гармонической линеаризации, метод статистической линеаризации, основаны на линеаризации нелинейного уравнения системы.
Мощным и эффективным методом исследования нелинейных систем является моделирование, инструментарием которого служит компьютер. В настоящее время многие сложные для аналитического решения теоретические и практические вопросы сравнительно легко могут быть решены с помощью вычислительной техники.

