




Счетчики
Счетчики являются необходимым электронным узлом практически любых систем автоматического регулирования, так как почти все параметры, контролируемые цифровой техникой, преобразуются в число импульсов.
Цифровые счетчики классифицируются следующим образом.
По коэффициенту (модулю) счета: двоичные, двоично – десятичные или с другим основанием счета; с произвольным модулем; с переменным модулем.
По направлению счета: суммирующие, вычитающие, реверсивные.
По способу организации связей: с последовательным переносом, с параллельным переносом, с комбинационным переносом, кольцевые.
Для двоичного счетчика коэффициент счета Ксч, т. е. максимальное подсчитываемое число входных импульсов, определяется разрядностью счетчика, иначе говоря, число триггеров m, Ксч=2m.
Введением дополнительных связей двоичные счетчики могут быть преобразованы в недвоичные, для которых Ксч  2m. Наибольшее распространение получили декадные счетчики с Ксч=10. Десятичный счет осуществляется в двоично–десятичном коде (двоичный по коду счета, десятичный по числу состояний). В электронных часах используются счетчики с коэффициентом счета Ксч=6 и Ксч=12.
2m. Наибольшее распространение получили декадные счетчики с Ксч=10. Десятичный счет осуществляется в двоично–десятичном коде (двоичный по коду счета, десятичный по числу состояний). В электронных часах используются счетчики с коэффициентом счета Ксч=6 и Ксч=12.
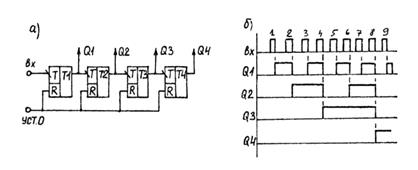
Рис. 8.3 Функциональная схема и временные диаграммы
суммирующего счетчика
На рис.8.3 представлены структурная схема суммирующего счетчик а с последовательным переносом и временные диаграммы, поясняющие его работу. Счетчик состоит из Т – триггеров, переключаемых по срезу (по заднему фронту) тактового импульса.
Суть последовательного переноса заключается в следующем: чтобы записать информацию в последний триггер, надо последовательно изменить информацию во всех предыдущих. Это снижает быстродействие счетчика. Примером счетчика с последовательным переносом может служить микросхема 564ИЕ8 КМОП – технологии, которая имеет счетный вход Т, инверсный V, установку нуля R. В структуре счетчика есть декодер, выходы которого Q0...Q9 являются выходами счетчика, выход Р – выходом переноса для подключения к следующему десятичному счетчику
8. 4 Цифро–аналоговые и аналого–цифровые преобразователи
В связи с широким внедрением цифровых вычислительных средств практически во все отрасли науки и техники стала актуальной задача связи микропроцессоров и мини-ЭВМ с различными технологическими устройствами. Обычно информацию о протекании технологических процессов получают с помощью первичных датчиков в аналоговой форме в виде уровней напряжения. Для оценки протекания процесса с помощью ЭВМ аналоговая информация должна быть преобразована в цифровую. Эту задачу выполняет аналого–цифровой преобразователь – АЦП.
Цифровой сигнал, выдаваемый ЭВМ для воздействия на исполнительный механизм, должен быть сначала преобразован в аналоговый. Эту задачу выполняет цифро–аналоговый преобразователь – ЦАП.
Самое краткое перечисление областей применения ЦАП и АЦП включает в себя цифровую видеоаппаратуру, управление технологическими процессами в промышленности, приборы для физических исследований, измерительные системы, системы распределения и отображения данных, цифровые системы передачи информационных сигналов и т. д. Короче, вся современная научная и техническая аппаратура нуждается в ЦАП и АЦП.
ЦАП и АЦП характеризуются погрешностью, быстродействием и динамическим диапазоном.
Погрешность определяется главным образом разрешающей способностью, которая зависит от числа N входного кода ЦАП или выходного кода АЦП.
ЦАП, преобразующий N – разрядный двоичный код, должен обеспечить 2N значений выходного сигнала с разрешающей способностью (2N – 1)–1. Например, при числе разрядов 12 количество независимых квантов (ступенек) выходного напряжения составит (212 – 1). Таким образом, каждая ступенька отличается от соседней на 0,0245% от значения шкалы.
Быстродействие ЦАП и АЦП определяется временем преобразования, зависит от назначения устройства и бывает от долей мкс до 100мкс.
Динамический диапазон – это допустимый диапазон изменения входного напряжения для АЦП и выходного для ЦАП.
8.4.1 Цифро – аналоговые преобразователи
На рис. 8.4 изображены: а – структурная схема, б – условное обозначение, в – диаграмма, поясняющая работу ЦАП.
Принцип действия заключается в следующем: если замкнут ключ 20 (входной код 0001), выходное напряжение ОУ, т. е. ЦАПа, будет Uвых=–Uоп Rо/ R1. При входном коде 0010 (замкнут ключ 21) выходное напряжение будет Uвых=–Uоп 2Rо/ R1 и т. д.. Таким образом, каждому значению входного кода будет соответствовать новое напряжение Uвых ЦАП, которое изменяется в зависимости от параметров резистивной матрицы, управляемой входным кодом, т. е. Uвых= f (код).
В состав ЦАП входят (см. рис. 8.4):
1. резистивная матрица;
2. набор токовых ключей, реализующих код;
2. источник опорного напряжения;
3. усилитель
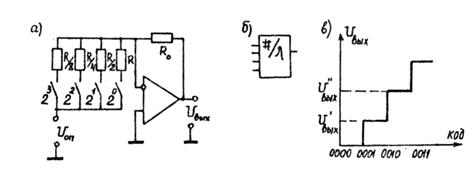
Рис. 8.4 Структурная схема, условное обозначение и временная диаграмма ЦАП.
Матрица резисторов (рис. 8.4) обладает рядом недостатков: малая разрядность, сложно точно изготовить различные по номиналам резисторы.
На рис. 8.5 показан ЦАП с матрицей R–2R, которая состоит из резисторов всего двух номиналов и представляет для источника Uоп постоянное сопротивление R.
Обычно резистор цепи обратной связи ОУ входит в блок резистивной матрицы кода и выбирается равным R.
Тогда выходное напряжение ЦАП будет
Uвых=– Uоп(1–2 N),
где N – разрядность ЦАП.
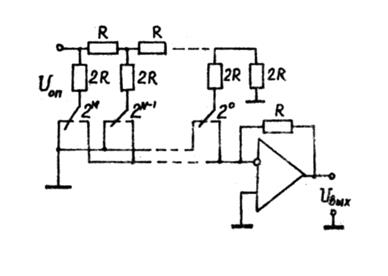
Рис.8.5 Структурная схема ЦАП с матрицей R – 2R.
8.4.2 Аналого–цифровые преобразователи
АЦП применяются в измерительных системах и измерительно-вычислительных комплексах для согласования аналоговых источников информации с цифровыми устройствами обработки и преобразования результатов измерения.

Рис. 8.6 Функциональная схема АЦП
Различным методам построения АЦП соответствуют устройства, различные по точности, быстродействию, помехозащищенности и сложности реализации.
Одним из наиболее распространенных является метод поразрядного уравновешивания, который называется методом последовательных приближений. Функциональная схема АЦП, реализующая метод, приведена на рис.8.6.
По команде “пуск” с тактового генератора f импульсы поступают на счетчик Сч., с выхода которого числа в коде поступают на вход ЦАП. Выходное напряжение Uвых ЦАП подается на вход компаратора, который сравнивает его с входным напряжением АЦП. При равенстве напряжений Uвх АЦП и Uвых ЦАП компаратор останавливает генератор, а входной код данного момента счетчика Сч. будет выходным кодом АЦП.
Примером законченного АЦП последовательного приближения может служить 10 – разрядный быстродействующий АЦП К1108ПВ1, который имеет время преобразования не более 0,9 мкс.
К схемам АЦП без использования ЦАП относятся АЦП двойного интегрирования и параллельного действия. Это АЦП К572ПВ2 и К1107ПВ2.
Наибольшим быстродействием обладает АЦП параллельного действия, недостатком которого является повышенная сложность
Микропроцессоры
Микропроцессоры (МП) – это электронные устройства, выполненные по технологии БИС (большие интегральные схемы) и способные по заданной программе выполнять определенные математические и логические операции.
На рисунке 8.7 показана обобщенная структурная схема МП. Входящий в нее арифметико – логическое устройство (АЛУ) реализует арифметические (сложение, вычитание) и логические (сравнение, И. ИЛИ) операции над двумя числами и выдает результат. Регистры (Р) служат для хранения и выдачи команд (регистр команд), адресов (регистр адресов), и данных (аккумулятор). Устройство управления (УУ) служит для преобразования команд, поступающих из регистров и внешнего запоминающего устройства (ЗУ), в сигналы, непосредственно воздействующие на все элементы МП и стимулирующие выполнение команд.
Рис.8.7 Обобщенная структурная схема микропроцессора
Все блоки МП связаны между собой и с внешним устройствами тремя шинами: шиной данных (ШД), шиной адресов (ША) и шиной управления (ШУ). Шина состоит из параллельных проводников, к которым подключаются блоки МП и внешние устройства. Она служит для обмена информацией между этими блоками. УУ определяет разделение в времени связей между блоками по одним и тем же проводникам (мультиплексирование).
На основе МП путем объединения его с рядом специализированных БИС выполняется микро – ЭВМ, или микропроцессорный комплект (МПК). МПК содержит кроме МП еще ЗУ (оперативную и постоянную память), устройство ввода – вывода информации (УВВ) и тактовый генератор (ТГ). На рис.8.8 показана обобщенная структурная схема МПК.
Если МПК предназначен для управления ОУ или технологическим процессом, то он должен быть снабжен УСО (устройствами связи с объектом), куда входят: датчики, АЦП, ЦАП, исполнительные устройства.
 |
Рис.8.7. Обобщенная структурная схема МПК
Упрощенную структурную схему МПК можно представить как агрегат, состоящий из МП, предназначенного для выполнения операций, определяемых командами, хранящимися в памяти (ЗУ) программ, над операндами из памяти данных, устройство ввода – вывода, обеспечивающего связь МПК с периферийными устройствами, которые в огромной мере расширяют возможности МПК.
Способность МПК выполнять операции проверки различного рода условий и вырабатывать решение по изменению хода выполнения команд демонстрирует некоторый интеллект МПК и принципиально отличает его от калькулятора.
Историю МП техники по уровню ее развития принято делить на этапы. Первый этап соответствует началу 70х годов. МП фирмы Intel Corporation имел 60 команд, 3 источника питания, малое быстродействие и небольшой объем памяти.
Современные МП 4-го поколения имеют одно питание, более 200 команд, примерно в 100 раз более высокое быстродействие, в 105 больший объем памяти, а разрядность чисел, с которыми они оперируют, больше в 16 раз. Причем улучшение технологических параметров МПК сопровождается снижением их стоимости.
Столь быстрое развитие МПС позволяет некоторым авторам сделать такое сравнение: если бы за последние 25 лет авиационная промышленность развивалась столь же стремительно, то “БОИНГ – 767” стоил бы 500 долларов, на нем можно было бы облететь земной шар за 20 минут, потратив при этом 19 литров горючего.

