




Компьютерное моделирование проектируемой установки производим в среде математического моделирования MATLAB 2011a, с использованием библиотеки Simulink. Модель построена на основе уравнений.
В имитационной модели инвертор построен на силовых модулях Mosfet. Открывающие импульсы подаются на транзисторы с релейного регулятора тока, осуществляя симметричную коммутацию силовых ключей. На рисунке x представлена имитационная модель двухфазного мостового инвертора на модулях Mosfet.

Рисунок x - Имитационная модель двухфазного мостового инвертора
Параметры модулей Mosfet, использованных в модели представлены на рис x
Рисунок x - Параметры модулей Mosfet
На рисунке x представлена имитационная модель релейного регулятора тока.

Рисунок x - Реализация релейного регулятора тока
ос - сигнал обратной связи по току, Iзад - сигнал задания тока, “Pulses” - открывающие импульсы.
Имитационная модель двухфазного линейного шагового двигателя с контуром регулирования тока представлена на рисунке x.
Описание блоков, применённых при составлении имитационной модели.
При реализации релейного регулятора тока были использованы блоки “boolean”, “NOT”, “double”, осуществляющие инвертирование открывающих импульсов, подаваемых на транзисторы Mosfet для осуществления симметричной коммутации.
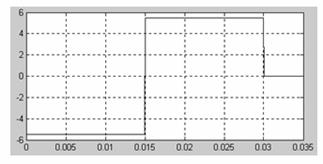
Блоки “Задание 1” и “Задание 2” формируют сигналы задания токов фаз А и В соответственно. Сигналы задания токов фаз UзтА и UзтВ показаны на рисунках x и x.
зт А, В
 , c
, c
Рисунок x - Сигнал задания тока фазы А
зт B, В
 , c
, c
Рисунок x - Сигнал задания тока фазы В

Рис. x - Имитационная модель электропривода проектируемой установки
а и Lа - сопротивление и индуктивность обмотки фазы А;в и Lв - сопротивление и индуктивность обмотки фазы В;- постоянная момента
Блоки “u1” и “u2” возвращают зависимости напряжений, прикладываемых к фазам А и В от времени; блоки “i1” и “i2” возвращают зависимости токов фаз А и В от времени; блок “f” возвращает зависимость тягового усилия линейного шагового двигателя от времени; блок “a” возвращает зависимость ускорения от времени; блок “v” - возвращает зависимость скорости от времени; блок “s” возвращает зависимость перемещения от времени.
x Расчёт и определение показателей качества переходных процессов
Графики, полученные в результате моделирования в среде MATLAB x, представлены на рисунках x - x.
 s, м, c
s, м, c
Рисунок x - Зависимость перемещения от времени
 v, м/с, c
v, м/с, c
Рисунок x - Зависимость скорости от времени
а, м/с2
 , c
, c
Рисунок x - Зависимость ускорения от времени
 , c
, c
Рисунок x - Зависимость тока фазы А от времени
 , c
, c
Рисунок x - Зависимость тока фазы B от времени
 F, H, c
F, H, c
Рисунок x - Зависимость тягового усилия от времени
Качество регулирования принято оценивать следующими основными показателями [x]:
величиной перерегулирования;
быстродействием или временем регулирования;
числом колебаний регулируемой величины за время переходного процесса.
 , c
, c
Рисунок x - Результаты отработки моделью задания движения на два шага вперёд.
Перерегулирование вычисляется по формуле
 (x)
(x)
Для проектируемой установки особенно важно перерегулирование по положению.
Из рисунка x видно, что hmax = hуст = 4 мм, следовательно, перерегулирование D% = 0%.
При отработке единичного шага hmax = hуст = 10 мкм (рисунок x).
Быстродействие, или время регулирования представляет собой время в течении которого отклонение регулируемой величины от установившегося значения превышает некоторое допустимое значение. В большинстве случаев это значение принимается равным 5%. Из рисунков x и x видно, что регулируемая величина (перемещение) после достижения установившегося значения больше не отклоняется от него, и, следовательно, время регулирования равно нулю.
Число колебаний регулируемой величины за время переходного процесса не превышает допустимого значения, так как колебания отсутствуют.
Из рисунка x видно, что величина единичного шага составляет 10 мкм, следовательно, система удовлетворяет требованиям точности позиционирования.
Из рисунка x видно, что максимальная скорость в проектируемой установке равна 0,27 м/с, что не превышает требуемой максимальной скорости 0,28 м/с и равно значению расчетной максимальной скорости.
Из рисунка x видно, что максимальное ускорение равно 17,7 м/с2, что не превышает требуемого значения, равного 18 м/с2.

