




Перейдем к рассмотрению собственных колебаний консервативной системы с двумя степенями свободы. Результаты изучения этой системы окажутся весьма полезными для исследований некоторых вертикальных собственных и вынужденных колебаний надрессорного строения и необрессоренных частей реальной схемы вагона. Заметим, что сравнительно недавно такая схема непосредственно применялась для изучения собственных колебаний вагонов.
Рассмотрим собственные колебания простейшей системы, показанной на рис. 7,а. Представим себе для наглядности, что
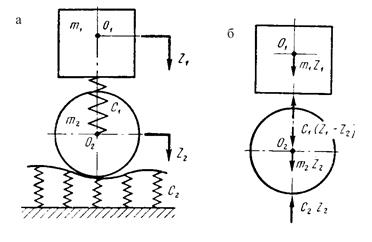
Рис. 7
 — масса кузова;
— масса кузова;  — масса колеса; G1 и G2 — соответственно веса верхнего и нижнего грузов; g — ускорение силы тяжести, с1 — жесткость рессоры, c2 — жесткость рельсового основания.
— масса колеса; G1 и G2 — соответственно веса верхнего и нижнего грузов; g — ускорение силы тяжести, с1 — жесткость рессоры, c2 — жесткость рельсового основания.
Поскольку здесь изображена система, где нет рассеяния энергии колебаний, то очевидно, что она относится к консервативным системам. Допустим, что этой системе дано какое-нибудь начальное возмущение (например, дано вначале перемещение массе m1) и система после этого стала колебаться. Сила инерции массы m1, очевидно, равна  , где
, где  — ускорение массы m1 при ее перемещении z1 (в дальнейшем для компактности в написании мы обозначим
— ускорение массы m1 при ее перемещении z1 (в дальнейшем для компактности в написании мы обозначим  . Внешняя сила, действующая на массу m1 в свободных колебаниях, определяется сжатием рессоры; она равна c1(z1-z2) и направлена навстречу силе I1 (Рис. 7,б), т. е.
. Внешняя сила, действующая на массу m1 в свободных колебаниях, определяется сжатием рессоры; она равна c1(z1-z2) и направлена навстречу силе I1 (Рис. 7,б), т. е.
 . (1.7)
. (1.7)
Внешними силами по отношению к массе m2 (см. рис. 7,б) являются сила, передаваемая нижним концом верхней пружины c1(z1-z2), и сила, вызванная деформацией нижней пружины — c2z2. Очевидно, что для сил, действующих на массу m2, справедливо уравнение
 (1.8)
(1.8)
Поделив левую и правую части уравнения (1.7) на m1, a уравнения (1.8) на m2 и сгруппировав в правой части члены по z1 и z2 , получим следующую уравнений:
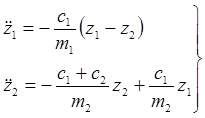 (1.9)
(1.9)
Введем следующие обозначения:
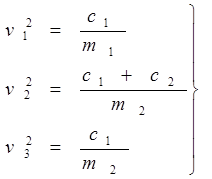 (1.10)
(1.10)
Рассмотрим размерность величин v1, v2, v3 или
 ,
,  ,
,
т.е. v имеет размерность частоты.
Эти частоты называются парциональными, т. е. частичными (входящими в состав общих колебаний). В частности, частота v1 соответствует собственным колебаниям массы m1 на пружине с жесткостью c1, т. е. это собственная чаcтотa, с которой колебалась бы масса m1, если бы жесткость c2 была бесконечно большой величины (рис. 8,а). Частота v3 соответствует той собственной частоте, с которой, колебалось бы колесо, если бы жесткость c2 оказалась равной нулю (колесо оторвалось от пути), а масса m1 оказалась закрепленной (рис. 8,в). Наконец, v2 соответствует частоте колебаний массы m2 при закреплении массы m1 (рис. 8,б).
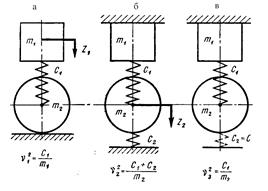
Рис. 8
Подставляя вышеуказанные обозначения (1.10) в уравнения (1.9), получим:
 (1.11)
(1.11)
Решение этой системы дифференциальных уравнений, ищем методом подстановки, полагая
 (1.12)
(1.12)
где А и В — амплитуды;
l — неизвестная угловая частота собственных колебаний.
Продифференцировав выражения (1.12), подставив их вторые производные в (1.11) и сократив все на sin(lt + a),получим:
 (1.13)
(1.13)
Совершенно очевидно, что эта система уравнений может дать отличные от нуля решения относительно постоянных А и В, если определитель, составленный из коэффициентов при А и В, будет равен нулю, т. е.
 (1.14)
(1.14)
Раскрыв этот определитель, получим биквадратное уравнение относительно l:
 , (1.15)
, (1.15)
откуда
 . (1.16)
. (1.16)
Таким образом, мы можем по величинам m1, m2, c1 и c2 получать главные круговые частоты собственных колебаний l 1, l 2; обращаем внимание на то, что они не зависят от амплитуд колебаний (величин А и В).
Итак, наша система имеет два линейно называемых решений:
первое  и
и  ;
;
второе  и
и  .
.
Поэтому общее решение уравнения (1.11) можно представить так:
колебания массы m1
 (1.17)
(1.17)
колебания массы m2
 (1.18)
(1.18)
Таким образом, собственные колебания массы m1 складываются из гармонических колебаний двух разных частот l1 и l2 соответственно с амплитудами А1 и А2, а собственные колебания массы m2 также составлены из этих же двух частот, но с амплитудами В1 и В2. Отсюда, очевидно, следует, что собственные частоты колебания масс m1 и m2 зависят от l1 и l2, т. е. от величины этих обеих масс и жесткостей обеих пружин (с1 и с2).
Амплитуды А1, А2, В1 и В2 не трудно определить из начальных условий. Если, например, для момента t = 0 известны a1, z1, z2,  и
и  , то из (1.17) и (1.18) следует:
, то из (1.17) и (1.18) следует:
 (1.19)
(1.19)
Из этих четырех уравнений и находятся четыре неизвестных величины А1, А2, В1 и В2.
Рассмотрим приближенный способ определения частот колебаний системы, изображенной на рис. 7. Для этого обозначим отношение парциальных частот
т.е.  ,
,  . (1.20)
. (1.20)
Физически это отношение представляет собой
 (1.21)
(1.21)
т. е. отношение жесткости верхней пружины с1 к суммарной жесткости обеих пружин с1+с2. Тогда, подставляя в (1.16) вместо  , получим
, получим
 (1.22)
(1.22)
Представим себе, что c1<<c2. Тогда из (1.21) следует, что g ® 0 и из (1.22) получим
 и
и  .
.
Так как c1 весьма мало по сравнению с c2, то очевидно, что
 , а
, а  (1.23)
(1.23)
Таким образом, если верхняя пружина весьма мягкая, а нижняя жесткая (т. е. c1<<c2), расчет собственных частот колебаний системы существенно упрощается. В этом случае можно пользоваться формулами (1.23). При таком подходе к расчету получилось, что частота l2 могла бы быть приближенно подсчитана так же, как и в случае, когда масса т1 колебалась бы на пружине жесткостью c1 независимо от колебаний массы т2, т. е. была бы подвешена так, как это показано на рис. 9,а; точно так же частота колебания l2 могла быть подсчитана исходя из расчетной схемы, изображенной на рис. 9,б.
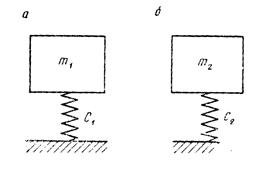
Рис. 9
Расчеты показывают, что влияние c2. на частоты и амплитуды колебаний массы т1 при жесткостях, имеющих место в рессорном подвешивании и в пути, оказывает весьма малое влияние на частоты и амплитуды колебаний кузовов вагонов; поэтому в расчетах колебаний кузовов упругостью пути обычно пренебрегают.
Заметим, что такое соотношение в жесткостях c1 и c2 всегда имеет место для подвешивания вагонов, у которых жесткость рессор c1<<c2 (всегда в десять и более раз меньше жесткости железнодорожного пути).
Можно себе представить и другой крайний случай соотношения жесткостей, когда c1>>c2. В этом случае, как это следует из формулы (1.21) g® 1. Тогда по этой формуле получим
 , (1.24)
, (1.24)

Если при этом еще m1>>m2 то
 (1.25)
(1.25)
В этом частном случае получается, что колебания массы m1 (см. формулу 1.17) выражаются приближенно так:
 (1.26)
(1.26)