




Для решения задачи будем использовать дискретно-аналитический метод, который состоит в следующем: по оси x осуществляется конечно-разностная аппроксимация, а по оси времени t рассматривается непрерывная задача (рис. 4.3).

Рис. 4.3. Схема дискретизации.
Введем обозначения:
 ;
;  ,
,  , (4.55)
, (4.55)
где в простейшем случае
 . (4.56)
. (4.56)
Здесь  – количество внутренних узлов конечно-разностной сетки, причем пусть – нечетное число.
– количество внутренних узлов конечно-разностной сетки, причем пусть – нечетное число.
Для всех внутренних узлов  получим конечно-разностное уравнение – дискретный аналог уравнения колебаний (4.54):
получим конечно-разностное уравнение – дискретный аналог уравнения колебаний (4.54):
 ,
,  , (4.57)
, (4.57)
где
 (4.58)
(4.58)
– вторая конечная разность, приближенно представляющая вторую производную от искомой функции  по аргументу
по аргументу  .
.
В соответствии с краевыми условиями из (4.54) для граничных узлов, очевидно, можем записать:
 ;
;  ;
;  ;
;  . (4.59)
. (4.59)
C учетом (4.59) преобразуются уравнения (4.57) Имеем:
 ; (4.60)
; (4.60)
 ; (4.61)
; (4.61)
 ,
,  ; (4.62)
; (4.62)
 ; (4.63)
; (4.63)
 . (4.64)
. (4.64)
Обоснуем, например, (4.60) и (4.61):
 ;
;

Введя обозначение
 , (4.65)
, (4.65)
можем представить разрешающую систему конечно-разностных уравнений (4.60)-(4.64) в матричном виде
 (4.66)
(4.66)
где
 . (4.67)
. (4.67)
Заметим, что матрица  положительно определена, т.е. все ее собственные числа положительные (в этом можно убедиться при их непосредственном вычислении).
положительно определена, т.е. все ее собственные числа положительные (в этом можно убедиться при их непосредственном вычислении).
Общее решение задачи (4.66) имеет вид:
 . (4.68)
. (4.68)
По условию рассматриваемой задачи
 , (4.69)
, (4.69)
откуда следует, что
 , где
, где  . (4.70)
. (4.70)
Это значит, что в векторе  лишь один «срединный элемент» (с номером
лишь один «срединный элемент» (с номером  ) равен единице, а остальные элементы равны нулю. Ненулевой элемент вектора соответствует узлу конечно-разностной сетки с координатой
) равен единице, а остальные элементы равны нулю. Ненулевой элемент вектора соответствует узлу конечно-разностной сетки с координатой  , в котором в момент времени
, в котором в момент времени  приложено сосредоточенное ударное воздействие величиной
приложено сосредоточенное ударное воздействие величиной  .
.
Подставив (4.69) в (4.68), получим окончательный вид общего решения:
 . (4.71)
. (4.71)
Варианты задания.
 – величина приложенного сосредоточенного ударного воздействия;
– величина приложенного сосредоточенного ударного воздействия;  ;
;  ;
;  – номер группы,
– номер группы,  – номер студента по журналу.
– номер студента по журналу.
Принять количество количество внутренних узлов конечно-разностной сетки  .
.
Пример соответствующего M-файла (ниже задано  ,
,  ):
):
function blow_f
g=input('g=');
s=input('s=');
n=input('n=');
L=300;P=300;
h=L/(n+1);
alfa=10^8*(100+g+s);
x=0:h:L;
a0=6*eye(n);a0(1,1)=5;a0(n,n)=5;
a1=ones(n-1,1);
a2=ones(n-2,1);
A=a0-4*(diag(a1,-1)+diag(a1,1))+diag(a2,-2)+diag(a2,2)
A=alfa*A/h^4;
F=zeros(n,1);F((n+1)/2)=P;
sq_A=sqrtm(A);
fJ=sqrt(eig(A));
t0=pi/(4*fJ(n));
tmax=125*t0;
nt=3;
t=[t0,tmax/2,tmax];
res=zeros(nt,n+2);
fprintf('\n прогиб балки Y(x,t)\n')
for i=1:nt
Y_t=inv(sq_A)*funm(sq_A*t(i),'sin')*F;
res(i,2:n+1)=Y_t';
fprintf('Y(%6.4f):',t(i)),fprintf('%8.4f',res(i,:)),fprintf('\n')
end
hold on
plot(x,res(1,:),'.-')
plot(x,res((nt+1)/2,:),'o-.r')
plot(x,res(nt,:),'*:g')
grid on
s1=sprintf('t=%6.4f',t(1));
s2=sprintf('t=%6.4f',t((nt+1)/2));
s3=sprintf('t=%6.4f',t(nt));
legend(s1,s2,s3,0)
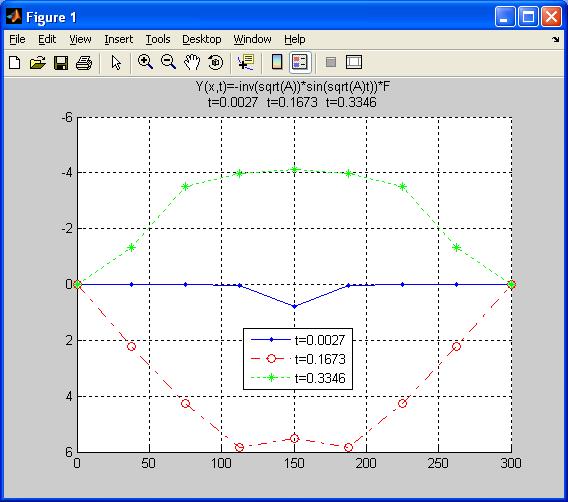
title(sprintf('Y(x,t)=-inv(sqrt(A))*sin(sqrt(A)t))*F\n%s %s %s', s1,s2,s3))
Результаты расчета:
g=3
s=12
n=7
A =
5 -4 1 0 0 0 0
-4 6 -4 1 0 0 0
1 -4 6 -4 1 0 0
0 1 -4 6 -4 1 0
0 0 1 -4 6 -4 1
0 0 0 1 -4 6 -4
0 0 0 0 1 -4 5
прогиб балки Y(x,t)
Y(0.0027): 0.0000 -0.0001 -0.0053 0.0217 0.7703 0.0217 -0.0053 -0.0001 0.0000
Y(0.1673): 0.0000 2.2085 4.2797 5.8565 5.5146 5.8565 4.2797 2.2085 0.0000
Y(0.3346): 0.0000 -1.3399 -3.5149 -3.9787 -4.1294 -3.9787 -3.5149 -1.3399 0.0000
>>
Замечание. Здесь вычисление функций от матрицы A реализуются следующим образом:
Ø  с использованием стандартной функции sqrtm(A),
с использованием стандартной функции sqrtm(A),
Ø  с использованием funm(sqrtm(A),’sin’).
с использованием funm(sqrtm(A),’sin’).
| Function | Syntax for Evaluating Function at Matrix A |
| exp | funm (A, @exp) |
| log | funm(A, @log) |
| sin | funm(A, @sin) |
| cos | funm(A, @cos) |
| sinh | funm(A, @sinh) |
| cosh | funm(A, @cosh) |
Кроме того, для вычисления  ,
,  и можно использовать встроенные функции expm(A), logm(A) и sqrtm(A), соответственно.
и можно использовать встроенные функции expm(A), logm(A) и sqrtm(A), соответственно.

