




Структурная схема объекта регулирования приведена на рис.5.1.
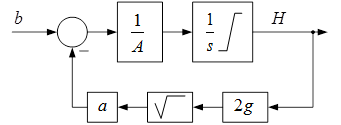
Рис.5.1 – Объект регулирования
На рисунке приняты следующие обозначения:
b – скорость притока воды в бак, м3/с;
А – Площадь поперечного сечения внутренней поверхности бака, м2;
а – диаметр выходной трубы, м2;
Поскольку уровень воды в баке не может превысить некоторого максимального значения, при котором бак будет заполнен полностью, равно как не может быть отрицательным, выходной сигнал интегратора принимается ограниченным.
Рекомендуется реализовать работу регулятора так, чтобы он выбирал величину скорости притока воды в зависимости от разницы между текущим значением уровня воды и заданным. При этом если ошибка равна нулю, скорость притока должна оставаться постоянной.
Таблица 5.1 – Задания по вариантам
| № вар. | b, м3/с | a, м2 | А, м2 | Нmax, м |
| 0.4 | 0.05 | 0.5 | ||
| 0.4 | 0.06 | 0.6 | 1.1 | |
| 0.5 | 0.07 | 0.4 | 1.2 | |
| 0.4 | 0.065 | 0.65 | 1.3 | |
| 0.45 | 0.08 | 0.7 | 1.4 | |
| 0.6 | 0.075 | 1.5 | ||
| 0.35 | 0.04 | 1.5 | 1.6 | |
| 0.4 | 0.06 | 0.9 | 1.7 | |
| 0.55 | 0.08 | 0.95 | 1.8 | |
| 0.6 | 0.09 | 0.74 | 1.9 | |
| 1.1 | 0.1 | 1.1 | ||
| 0.7 | 0.105 | 0.85 | 2.1 | |
| 0.75 | 0.11 | 0.97 | 2.2 | |
| 0.85 | 0.12 | 0.96 | 2.3 | |
| 1.5 | 0.13 | 1.3 | 2.4 | |
| 1.6 | 0.14 | 2.5 | ||
| 1.15 | 0.15 | 1.8 | 2.6 | |
| 1.25 | 0.16 | 2.3 | 2.7 | |
| № вар. | b, м3/с | a, м2 | А, м2 | Нmax, м |
| 1.35 | 0.17 | 0.8 | 2.8 | |
| 1.45 | 0.18 | 0.96 | 2.9 | |
| 1.55 | 0.19 | 1.45 | ||
| 1.65 | 0.2 | 1.21 | 3.1 | |
| 1.8 | 0.214 | 1.36 | 3.2 | |
| 1.85 | 0.22 | 0.84 | 3.3 | |
| 1.95 | 0.23 | 0.5 | 3.4 | |
| 2.1 | 0.25 | 0.6 | 3.5 | |
| 2.25 | 0.26 | 0.77 | 3.6 | |
| 2.4 | 0.27 | 0.95 | 3.7 | |
| 2.55 | 0.28 | 1.36 | 3.8 | |
| 2.7 | 0.3 | 2.1 | 3.9 | |
| 2.85 | 0.31 | 0.78 | ||
| 0.32 | 1.9 | 4.1 | ||
| 3.1 | 0.33 | 0.95 | 4.2 | |
| 3.5 | 0.34 | 3.75 | 4.3 | |
| 3.4 | 0.35 | 2.45 | 4.4 | |
| 3.6 | 0.36 | 3.6 | 4.5 | |
| 3.8 | 0.37 | 2.75 | 4.6 | |
| 0.38 | 3.74 | 4.7 | ||
| 4.3 | 0.39 | 4.68 | 4.8 | |
| 4.5 | 0.4 | 4.9 | ||
| 4.7 | 0.41 | 4.1 | ||
| 4.9 | 0.42 | 2.02 | 5.1 | |
| 5.1 | 0.43 | 2.35 | 5.2 | |
| 5.3 | 0.44 | 2.96 | 5.3 | |
| 5.5 | 0.45 | 2.75 | 5.4 | |
| 5.7 | 0.46 | 2.74 | 5.5 | |
| № вар. | b, м3/с | a, м2 | А, м2 | Нmax, м |
| 5.9 | 0.47 | 2.84 | 5.6 | |
| 6.1 | 0.48 | 1.96 | 5.7 | |
| 6.3 | 0.49 | 2.5 | 5.8 | |
| 6.5 | 0.5 | 3.7 | 5.9 |
Лабораторная работа №6
Гашение колебаний маятника с помощью нечеткой логики
Цель работы: ознакомиться с особенностями многоуровневых систем нечеткой логики на примере системы гашения колебаний маятника.
Задание
1. Создать модель маятника с подвижной точкой подвеса согласно указанным в табл.7.1 данными. Получить графики переходного процесса угла отклонения груза, угловой скорости, перемещения и линейной скорости точки подвеса при равноускоренном движении точки подвеса с ускорением 1 м/с2.
2. Построить систему гашения колебаний груза (входные величины – угол и угловая скорость). Получить графики этих же величин.
3. Добавить стабилизирующий регулятор в виде системы нечеткой логики, входными величинами которого являются перемещение и линейная скорость точки подвеса. Скорректировать настроечные коэффициенты, добиться оптимального соотношения между временем гашения колебаний и величиной пикового ускорения точки подвеса. Получить графики и сделать выводы об особенностях работы такой системы.
Таблица 6.1 – Задания по вариантам
| № вар. | ||||||||||
| l, м | 0.5 | 0.7 | 0.9 | 1.1 | 1.3 | 1.5 | 1.7 | 1.9 | 2.1 | 2.3 |
| № вар. | ||||||||||
| l, м | 2.5 | 2.7 | 2.9 | 3.1 | 3.3 | 3.5 | 3.7 | 3.9 | 4.1 | 4.3 |
| № вар. | ||||||||||
| l, м | 4.5 | 4.7 | 4.9 | 5.1 | 0.6 | 0.8 | 1.2 | 1.4 | 1.6 |
| № вар. | ||||||||||
| l, м | 1.8 | 2.2 | 2.4 | 2.6 | 2.8 | 3.2 | 3.4 | 3.6 |
| № вар. | ||||||||||
| l, м | 3.8 | 4.2 | 4.4 | 4.6 | 4.8 | 5.2 | 5.4 | 0.4 |
Лабораторная работа №7

