




Под аппроксимацией обычно подразумевается описание некоторой, порой не заданной явно, зависимости или совокупности представляющих ее данных с помощью другой, обычно более простой или более единообразной зависимости. Часто данные находятся в виде отдельных узловых точек, координаты которых задаются таблицей данных. Результат аппроксимации может не проходить через узловые точки. Для обработки данных MATLAB использует различные функции интерполяции и аппроксимации данных.
Одна из наиболее известных аппроксимаций — полиномиальная. В системе MATLAB определены функции аппроксимации данных полиномами по методу наименьших квадратов — полиномиальной регрессии. Это выполняет функция, приведенная ниже:
– polyfit (x, y, n) – возвращает вектор коэффициентов полинома р (х) степени n, который с наименьшей среднеквадратичной погрешностью аппроксимирует функцию у (х).
Под интерполяцией обычно подразумевают вычисление значений функции f(x) в промежутках между узловыми точками. Линейная, квадратичная и полиномиальная интерполяция реализуются при полиномиальной аппроксимации. В ряде случаев очень удобна сплайновая интерполяция и аппроксимация таблично заданных функций. При ней промежуточные точки ищутся по отрезкам полиномов третьей степени — это кубическая сплайновая интерполяция.
При этом обычно такие полиномы вычисляются так, чтобы не только их значения совпадали с координатами узловых точек, но также, чтобы в узловых точках были непрерывны производные первого и второго порядков. Такое поведение характерно для гибкой линейки, закрепленной в узловых точках, откуда и происходит название spline (сплайн) для этого вида интерполяции (аппроксимации).
Для одномерной табличной интерполяции используется функция interpl:
– y i = interp1 (x, y, xi) — возвращает вектор y i, содержащий элементы, соответствующие элементам xi и полученные интерполяцией векторов х и y. Вектор х определяет точки, в которых задано значение y.
– yi = interp1 (x, y, xi , method) — позволяет с помощью параметра method задать метод интерполяции:
– 'nearest' — ступенчатая интерполяция;
– 'linear' — линейная интерполяция (принята по умолчанию);
– 'spline' — кубическая сплайн-интерполяция;
– 'cubic' или 'pchip' — интерполяция многочленами Эрмита.
Сплайн – интерполяция используется для представления данных отрезками полиномов невысокой степени – чаще всего третьей. При этом кубическая интерполяция обеспечивает непрерывность первой и второй производных результата интерполяции в узловых точках. Реализуется сплайн-интерполяция следующей функцией:
– yi = spline (x, y, xi) — использует векторы х и у, содержащие аргументы функции и ее значения, и вектор xi, задающий новые точки.
Решение большинства задач интерполяции и аппроксимации функций и табличных данных обычно сопровождается их визуализацией. Она, как правило, заключается в построении узловых точек функции (или табличных данных) и в построении функции аппроксимации или интерполяции (рис.6.1).
В MATLAB 6.5 совмещение функций аппроксимации с графической визуализацией доведено до логического конца — предусмотрена аппроксимация рядом методов точек функции, график которой построен. И все это выполняется прямо в окне редактора графики Property Editor. Для этого в позиции Tools графического окна имеются две новые команды:
Basic Fitting – основные виды аппроксимации (регрессии);
Data Statistics – статистические параметры данных.
Команда Basic Fitting открывает окно, дающее доступ к ряду видов аппроксимации и регрессии: сплайновой, эрмитовой и полиномиальной со степенями от 1 (линейная аппроксимация) до 10. В том числе со степенью 2 (квадратичная аппроксимация) и 3 (кубическая аппроксимация) (рис.6.2).

Рисунок 6.1 – Пример визуализации процесса интерполяции

Рисунок 6.2 – Окно доступа к видам аппроксимации и регрессии
Команда Data Statistics открывает окно с результатами простейшей статистической обработки данных (рис.6.3).
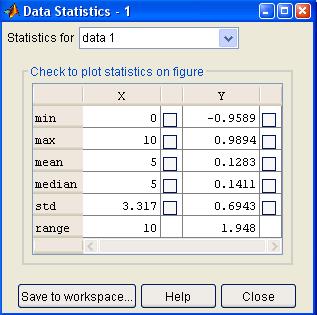
Рисунок 6.3 – Окно результатов статистической обработки
Анализ поведения многих систем и устройств в динамике базируются на решении систем обыкновенных дифференциальных уравнений (ОДУ). Их, как правило, представляют в виде системы из дифференциальных уравнений первого порядка в форме Коши:
 (2)
(2)
где  — начальные и конечные точки интервалов.
— начальные и конечные точки интервалов.
Параметр t не обязательно означает время, хотя чаще всего решение дифференциальных уравнений ищется во временной области. Вектор b задает начальные и конечные условия.
Для решения систем ОДУ в MATLAB реализованы различные методы. Их реализации названы решателями ОДУ. Решатели реализуют следующие методы решения систем дифференциальных уравнений, причем для решения жестких систем уравнений рекомендуется использовать, только специальные решатели ode45, ode23:
– ode45 — одношаговые явные методы Рунге-Кутта 4-го и 5-го порядка. Это классический метод, рекомендуемый для начальной пробы решения.
– ode23 — одношаговые явные методы Рунге-Кутта 2-го и 4-го порядка.
В описанных далее функциях для решения систем дифференциальных уравнений приняты следующие обозначения и правила:
– options — аргумент, создаваемый функцией odeset (еще одна функция позволяет вывести параметры, установленные по умолчанию);
– tspan — вектор, определяющий интервал интегрирования [ t0 tfinal ]. Для получения решений в конкретные моменты времени t 0, t l,..., t final (расположенные в порядке уменьшения или увеличения) нужно использовать tspan = [ t 0 t l... t final];
– у0 — вектор начальных условий;
– pi, р2,.. — произвольные параметры, передаваемые в функцию F;
– Т, Y — матрица решений Y, где каждая строка соответствует времени, возвращенном в векторе-столбце Т.
Перейдем к описанию функций для решения систем дифференциальных уравнений:
– [ T, Y ] = solver (@F,tspan, у0) — где вместо solver подставляем имя конкретного решателя — интегрирует систему дифференциальных уравнений вида у '= F (t, y) на интервале tspan с начальными условиями у0, @F — дескриптор ODE-функции. Каждая строка в массиве решений Y соответствует значению времени, возвращаемому в векторе-столбце Т;
– [ T, Y ] = solver (@F, tspan, y0, options) — дает решение, подобное описанному выше, но с параметрами, определяемыми значениями аргумента options, созданного функцией odeset.
Технология решения дифференциальных уравнений в системе MATLAB такова:
1) Создание m–файла. Независимо от вида системы он имеет вид:
function dy = solverDE(t, y)
dy = zeros(n, 1);
dy(1) = f1 (t, y(1), y(2), …, y(n));
dy(2) = f2 (t, y(1), y(2), …, y(n));
……………………………
dy(n) = fn (t, y(1), y(2), …, y(n));
2) Получение решения и сопровождающий его график:
>> [T, Y] = solver(‘solverDE’, [t0 tfinal], [y10 y20 … yn0]);
>> plot(T, Y)
Пусть, к примеру, требуется решить дифференциальное уравнение:
 (3)
(3)
с единичными начальными условиями.
Данное дифференциальное уравнение второго порядка приведем к системе дифференциальных уравнений первого порядка:
 (4)
(4)
с начальными условиями у 1(0)=1, у 2(0)=1, у 3(0)=1.
Вектор  правых частей системы уравнений, вычисляем с помощью собственной функции ex21 (рисунок 6.4):
правых частей системы уравнений, вычисляем с помощью собственной функции ex21 (рисунок 6.4):
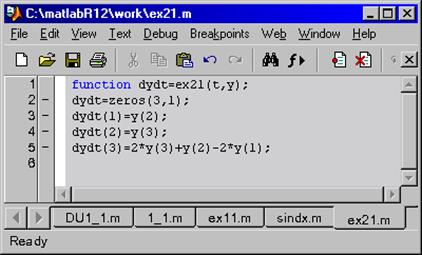
Рисунок 6.4 – Пример создания функции для решения системы ОДУ
Теперь можно вызывать функцию ode45, находящую решение нашей системы дифференциальных уравнений с начальными условиями [1,1,1] на отрезке [0,20] (рисунок 6.5)
>> y0=[1 1 1 ];
>> tspan=[0 20];
>> [T,Y]=ode45('ex21',tspan,y0);
>> plot(T,Y)
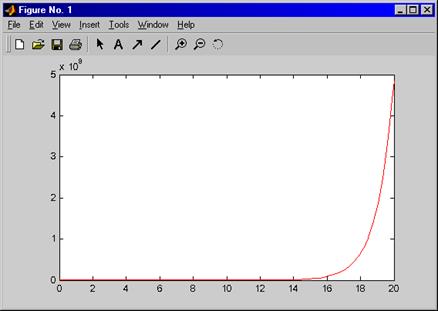
Рисунок 6.5 – Результат работы программы
Для решения дифференциальных уравнений в MATLAB зарезервирована функция dsolve, которая имеет следующие форматы обращения и возвращает аналитическое решение системы дифференциальных уравнений с начальными условиями:
– y= dsolve ('Dy(x)'), где Dу(х) – уравнение, у–возвращаемые функцией dsolve решения.
– y= dsolve ('Dy(x)', 'НУ'), где Dу(х) – уравнение, НУ – начальные условия.
Первая производная функции обозначается Dу, вторая производная – D2у и так далее. Функция dsolve предназначена также для решения системы дифференциальных уравнений. В этом случае она имеет следующий формат обращения:
– [f,g] = dsolve ('Df(x),Dg(x)', 'НУ'), где Df(x),Dg(x) – система уравнений, НУ – начальные условия.
Решить дифференциальное уравнение (3) и использованием функции dsolve (рисунок 6.6).
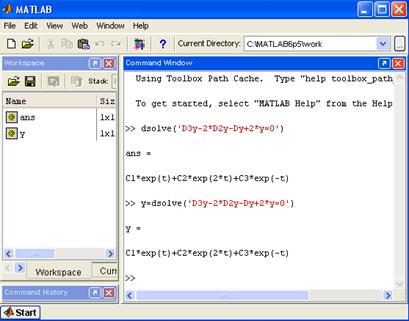
Рисунок 6.6 – Пример использования команды dsolve
Порядок выполнения
1. С помощью интерполяции найти значение таблично заданной функции в указанной точке таблица 6.1.
2. Выполнить аппроксимацию таблично заданной функции таблица 6.1.
Таблица 6.1– Варианты заданий
| № варианта | Табличная функция для интерполяции и аппроксимации | ||||||||
| X | |||||||||
| Y | 2.5 | 5.5 | |||||||
| X | |||||||||
| Y | -1 | -0.5 | 6.5 | 11.5 | |||||
| X | |||||||||
| Y | 0.5 | 2.5 | 8.5 | 9.5 | 17.5 | ||||
| X | |||||||||
| Y | |||||||||
| X | |||||||||
| Y | -2 | ||||||||
| X | |||||||||
| Y | -22 | -14 | -2 | ||||||
| X | |||||||||
| Y | 6.5 | 7.5 | |||||||
| X | |||||||||
| Y | 2.5 | 14.5 | 38.5 | 74.5 | |||||
| Продолжение таблицы 6.1 | |||||||||
| X | |||||||||
| Y | -1 | ||||||||
| X | |||||||||
| Y | -2 | 0.82 | 1.46 | 2.47 | 2.9 | 3.29 | |||
| X | |||||||||
| Y | 2.5 | 14.5 | 38.5 | 74.5 | |||||
| X | |||||||||
| Y | 0.5 | 2.5 | 8.5 | 9.5 | 17.5 | ||||
| X | |||||||||
| Y | -1 | ||||||||
| X | |||||||||
| Y | -22 | -14 | -2 | ||||||
| X | |||||||||
| Y | 2.5 | 5.5 |
3. На отрезке [ a, b ] найти решение дифференциального уравнения в виде  с начальными условиями
с начальными условиями  ,
,  . Варианты заданий представлены в таблице 6.2. Построить график функции.
. Варианты заданий представлены в таблице 6.2. Построить график функции.
Таблица 6.2– Варианты заданий
| № варианта | 
| Начальные условия | |||
| a | b |
|
| ||
| |||||
| |||||

| |||||

| |||||

| |||||

| |||||

| |||||

| |||||

| |||||
| 1.5 | ||||
| -3 | -2 | |||
|
| |||||

| |||||
|
| |||||
| Продолжение таблицы 6.2 | |||||
|
|
4. Решить систему ОДУ, представленную в таблице 6.3, при заданных начальных условиях с помощью функции dsolve.
Таблица 6.3 Варианты заданий
| № варианта | Система ОДУ | Начальные условия | |||

| 
| 
| 
| ||

| 1.5 | 1.5 | |||

| -1 | -1.5 | |||
|
| 1.5 | 1.5 | |||
| 1.5 | ||||
| 0.5 | 1.5 | -1 | ||
| 0.5 | ||||
| -1 | ||||
| 1.5 | ||||
| -1 | ||||

| -1 | -1.5 | |||
| 1.5 | 1.5 | -1 | -1 | |

| -1 | 1.5 | |||
| Продолжение таблицы 6.3 | |||||
| 0.5 | -1 | |||

| -2 | ||||

| -1 |
Содержание отчета
1. Цель занятия.
2. Листинг программы.
3. Результаты выполнения.
Контрольные вопросы
1.Для чего служит функция interp1?
2. Какой функцией реализуется сплайн-интерполяция в MATLAB?
3. Какие существуют методы решения систем дифференциальных уравнений?
Практическое занятие № 7

