




В процессе эксплуатации ЭВМ может рассматриваться как физическая система S, которая в результате проверки может оказаться в одном из следующих состояний: s1 — ЭВМ полностью исправна; s2 — ЭВМ имеет незначительные неисправности в оперативной памяти, при которых она может решать задачи; s3 — ЭВМ имеет существенные неисправности и может решать ограниченный класс задач; s4 — ЭВМ полностью вышла из строя.
В начальный момент времени ЭВМ полностью исправна (состояние s1). Проверка ЭВМ производится в фиксированные моменты времени t1, t2, t3. Процесс, протекающий в системе S, может рассматриваться как однородная марковская цепь с тремя шагами (первая, вторая, третья проверки ЭВМ).
1) Составить матрицу переходных вероятностей.
2) Определить вероятности состояний ЭВМ после трех проверок.
| В1 | 
|
| В2 | 
|
| В3 | 
|
| В4 | 
|
| В5 | 
|
| В6 | 
|
| В7 | 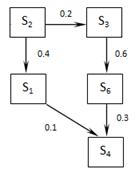
|
| В8 | 
|
| В9 | 
|
| В10 | 
|
ПРИЛОЖЕНИЕ
Для моделирования цепей Маркова понадобится ряд функций пользователя (Программные модули, реализующие эти функции, представлены на рис. ниже):
1. Функция TrPr(Р, п) вычисляет матрицу переходных вероятностей состояний цепи Маркова за п шагов, если матрица переходных вероятностей за шаг есть Р.
2. Безусловные вероятности состояний цепи Маркова на N-м шаге вычисляются функцией UnTrPr(а, Р, п), где а — это вектор вероятности состояний на нулевом шаге.
3. Функция StPr(а, Р, п) вычисляет вероятности состояний для всех п шагов, в предположении, что на нулевом шаге распределение вероятностей состояний есть а.
4. Функция Def(а, х) определяет номер интервала i, в котором содержится число х. Длины интервалов а0, a1,... содержатся и некотором столбце а.
5. Функция ModMCh(а, Р, п, RN) осуществляет деноминированное моделирование цепи Маркова в течение п шагов, выдавая одну траекторию для заданного вектора RN. В качестве входных переменных используются: вектор а, определяющий начальное распределение вероятностей состояний цепи; матрица Р вероятностей переходов между состояниями за шаг; вектор RN, содержащий п + 1 компоненту RNi, RNi < 0 < 1, которые используются при определении состояний цепи Маркова на различных шагах (компонента RN0 используется для выработки начального состояния цепи согласно распределению а, остальные компоненты — для выработки состояний на шагах 1, 2, п). Эта функция используется в модуле, реализующем основную функцию ImModMCh(а, Р, п, т), которая сама генерирует значение вектора RN. Данный модуль осуществляет имитационное моделирование цепи Маркова в течение п шагов. Здесь а, Р, п те же, что и в предыдущей программе, а т — число моделируемых траекторий.
6. Функция ImModMCh в качестве результата возвращает матрицу, строки которой соответствуют номеру шага, а столбцы — номеру реализации. На их пересечении стоит номер состояния на данном шаге в соответствующей реализации.
 Пользовательские функции
для моделирования цепей Маркова
Пользовательские функции
для моделирования цепей Маркова
|
Группа функций, используемая для анализа поглощающих цепей Маркова:
1. Функция MeanV(Р, т) вычисляет среднее число визитов в невозвратные состояния вплоть до выхода цепи Маркова из множества невозвратных состояний. Здесь Р — матрица переходных вероятностей, т — число возвратных состояний. Напомним, что вначале нумеруются возвратные состояния, так что первые т строк и столбцов матрицы Р связаны с возвратными состояниями. Последние строки и столбцы описывают вероятности переходов между невозвратными состояниями, число которых k - т, где k — общее число состояний цепи. Им соответствует квадратная матрица Q размера k - т. Вышеупомянутое число т находится с помощью функции Dec(Р), которая описывается ниже.
2. Функция AbPr(Р, т) рассчитывает вероятности поглощения в различные возвратные состояния, если на начальном шаге цепь Маркова находится в определенном невозвратном состоянии. В функции используется матрица R, являющаяся подматрицей Р. Столбцы матрицы R соответствуют возвратным, а строки — невозвратным состояниям цепи Маркова, так что эта матрица дает вероятности переходов за шаг из каждого невозвратного в возвратное состояние. Результатом работы функции AbPr(Р, т) является матрица, столбцы которой соответствуют т возвратным состояниям, а строки — k - т невозвратным состояниям. На их пересечении стоит вероятность того, что для цепи Маркова, выходящей из рассматриваемого невозвратного состояния, первым возвратным будет данное состояние.
Заключительные две функции позволяют определять замкнутые классы возвратных и класс невозвратных состояний цепи Маркова:
3. Функция Aсс(Р) рассчитывает матрицу достижимости для состояний согласно методу. Строки и столбцы этой матрицы соответствуют состояниям цепь Маркова. На пересечении i-й строки и j-го столбца стоит 1, если состояние j достижимо из состояния i, и 0 — иначе.
4. Функция Dec(Р) для каждого состояния определяет номер замкнутого класса, к которому состояние принадлежит. Исключением здесь являются состояния, которым соответствует нулевой номер класса: эти состояния являются невозвратными. Нулевая строка выводимой матрицы содержит номера состояний, а следующая строка — номера классов, к которым принадлежат эти состояния.

