




Инструментальная погрешность (погрешность измерительного устройства) имеет определяющее значение для наиболее распространенных технических измерений. На рис. 1.9. приведена классификация погрешностей ИУ по ряду признаков.
В понятие систематической и случайной статической и динамической погрешности ИУ вложен тот же смысл, что и в понятия погрешностей измерения.
Основной погрешностью ИУ называют погрешность, которая получается при использовании его в нормальных условиях. Как правило, за нормальные условия принимают температуру окружающей среды равную tОС = (20±2) 0С; атмосферное давление равное РАТ = 760 мм. рт. ст.; заданное напряжение питания; нормальное рабочее положение и т.д. Нормальные условия применения указываются в стандартах или технических условиях на ИУ.
Дополнительной погрешностью ИУ называют изменение его погрешности, вызванной отклонением одной из влияющих физических величин от ее нормативного значения или выходом ее за пределы нормальной области значений.
Иными словами, дополнительная погрешность – это часть погрешности, которая добавляется (алгебраически складывается) к основной в случаях, когда ИУ применяется в рабочих (эксплуатационных) условиях. Например: температурная погрешность, вызванная отклонением температуры окружающего воздуха от нормального значения; погрешность установки, обусловленная отклонением положения прибора от рабочего, отклонение напряжения питания от его номинального значения и т.п.












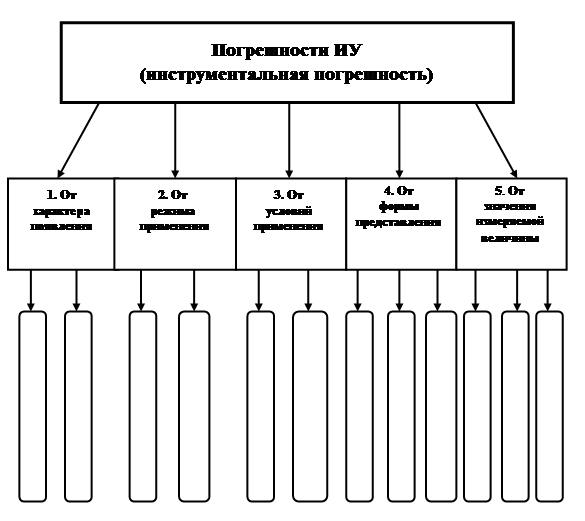
Рис. 1.9. Классификация погрешностей измерительных устройств
В зависимости от формы представления погрешности измерительных устройств подразделяются на абсолютные, относительные и приведенные.
Абсолютной погрешностью измерительного прибора ∆ называют разность показаний прибора ХП и действительного значения ХД измеряемой величины:
± ∆= ХП – ХД, (1.14)
где ХП =ХН; Х1, Х2, … Хm … ХК – показания прибора.
Действительное значение ХД определяется с помощью рабочих эталонов или по номинальным статическим характеристикам ИУ.
Относительной погрешностью ИП называют отношение абсолютной погрешности ИП к действительному значению измеряемой величины. Она выражается в %:
 (1.15)
(1.15)
Так как абсолютная погрешность  , то относительную погрешность можно рассчитать и по формуле:
, то относительную погрешность можно рассчитать и по формуле:
 (1.16)
(1.16)
Приведенной погрешностью ИП называют отношение абсолютной погрешности ИП к нормирующему значению ХN Приведенную погрешность также выражают в процентах:
 (1.17)
(1.17)
Нормирующее значение ХN – условно принятое значение, которое чаще всего равно диапазону показаний ИП ХN = ХК – ХН.
Суть погрешности в зависимости от формы представления для измерительных преобразователей та же, что и для ИП. Однако для определения их погрешности необходимо знать НСХ функции прямого и обратного преобразования (градуированную характеристику)  .
.
Для рассмотрения зависимости погрешности ИУ от значения измеряемой величины используются понятия номинальной и реальной функции преобразования ИУ.
Номинальной (или идеальной) функцией преобразования называют функцию преобразования, которая приписана ИУ данного типа, указана в его паспорте и используется при выполнении измерений и проверке (калибровке).
Реальной функцией преобразования называют ту функцию преобразования, которой обладает конкретный экземпляр ИУ данного типа. Из-за несовершенства технологии они, как правило, отличаются друг от друга.
По принципу отклонения реальной характеристики от номинальной погрешности принято разделять на аддитивную, мультипликативную и гистерезисную.
Аддитивной или погрешностью нуля ИУ, называют погрешность, которая остается постоянной при всех значениях измеряемой величины. В этом случае (рис. 1.10, а) реальная функция преобразования Y = fР(Х) несколько смещена относительно номинальной Y = fН(Х), т.е. выходной сигнал ИУ для всех значений измеряемой величины Х будет больше (или меньше) на одну и ту же величину, чем он должен быть, в соответствии с номинальной функцией преобразования.

Рис. 1.10. Реальные и номинальные функции преобразования ИУ
Систематическая аддитивная погрешность устраняется с помощью специального корректора нуля. Случайную аддитивную погрешность исключить из результата измерения нельзя, но можно определить некоторую полосу, ширина которой остается постоянной при всех значениях измеряемой величины (рис. 1.10, а).
Возникновение случайной аддитивной погрешности вызывается трением в опорах, контактными сопротивлениями, дрейфом нуля, шумом и фоном измерительного устройства.
Мультипликативной или погрешностью чувствительности ИУ называют погрешность, которая линейно возрастает (или убывает) с увеличением измеряемой величины.
Графически появление мультипликативной погрешности интерпретируется (рис. 1.10, б) поворотом реальной функции преобразования YР = fР(Х) относительно номинальной Y=fН(Х). Причиной возникновения случайной мультипликативной погрешности является изменение коэффициента преобразования отдельных элементов и узлов ИУ. Если мультипликативная погрешность является случайной, то реальная функция преобразования представляется полосой, ширина которой с увеличением измеряемой величины увеличивается (рис. 1.10, б).
Наиболее существенной и трудноустранимой систематической погрешностью ИУ является погрешность гистерезиса или погрешность обратного хода, выражающаяся в несовпадении (рис. 1.10, в) реальной функции преобразования ИУ при увеличении (прямой ход) или уменьшении (обратный ход) измеряемой величины.
Причинами гистерезиса могут быть люфт и сухое трение в механических передающих элементах, внутреннее трение в металлах пружин, явление упругого последействия в упругих чувствительных элементах, явление поляризации в электрических элементах и т.п.
Для количественной оценки погрешности гистерезиса используется понятие вариация.
Вариацией (V) ИУ называют среднюю разность между значениями выходного сигнала, соответствующую одному и тому же значению измеряемой величины, полученную при многократном и двухстороннем подходе к этому значению, т.е. при прямом и обратном ходе указателя.
Разность показаний ИП в одной и той же точке при прямом и обратном ходе указателя называется вариацией.
Абсолютное значение вариации для измерительных приборов в единицах измеряемой величины VХ и преобразователей в единицах выходного сигнала VY определяется соответственно по формулам:
VХ = Хпр – Хобр, (1.18)
VY = Yпр – Yобр, (1.19)
где Хпр и Хобр – показания измерительного прибора в одной и той же
точке при прямом и обратном ходе указателя;
Yпр и Yобр – выходной сигнал измерительного преобразователя
при прямом и обратном ходе в одной и той же точке.
Приведенное значение вариации для измерительных приборов WX и преобразователей WY определяется соответственно по формулам:
 (1.20)
(1.20)
 (1.21)
(1.21)

